1.本发明涉及泵领域,具体的说是一种消防泵。
背景技术:
2.森林不仅关系着我国生态环境建设,而且对我国林业经济以及和谐社会的发展具有重大作用。森林火灾是对林业森林影响最大、危害最深的自然灾害,每年因森林失火而造成的经济、社会及环境效益的损失巨大。我国自身森林覆盖率较低,尽管近年来加大了对林业建设的投入,但仍与发达国家存在较大差距。通常情况下都是指挥中心在接收到火灾信息后做出统一的部署,消防救援人员驾驶消防车赶往火灾点进行扑救,消防车通过喷水和喷泡沫灭火,因此消防泵广泛应用在各种消防设备中。现有技术中的森林消防泵在使用过程中存在着一些不足之处,其都是在有火情后,人员才赶往火情现场,消防人员可以比较快速的部署,但是消防泵比较笨重,并且还有需要准备时间,从而导致前期准备时间多。
技术实现要素:
3.针对现有技术的不足,本发明的目的在于提供一种无人驾驶消防泵车及其控制系统,使用时,通过无人驾驶装置与无人机的有效结合使专业人员及早发现火情,并且能够使消防泵准确而快速的进入火灾发生地,同时在比较复杂的环境下也能够方便移动。
4.为了实现上述目的,本发明采用如下技术方案;
5.一种无人驾驶消防泵车及其控制系统,包括车体、无人机和驾驶中心,车体内部上安装有控制系统装置和无人驾驶装置,车体上部前方安装有摄像头,车体上顶面安装有红外热像仪、激光测距仪和测温仪,车体下侧安装有车轮装置,车体上表顶面活动连接有支架,支架上安装有消防泵,控制系统装置设置有控制器,控制器上安装有电源开启键和电源停止键,控制器连接有信号处理器,信号处理器通过信号控制摄像头、激光测距仪、测温仪、红外热像仪的运行,信号处理器还连接有车轮装置,通过信号来控制车轮装置的动作状态,信号处理器通过信号控制电子点火开关和电子熄活开关的启动,控制器连接有触摸屏驱动电路,触摸屏驱动电路上连接有触摸屏,触摸屏驱动电路分别与摄像头、激光测距仪、测温仪、红外热像仪和车轮装置之间连接有反馈系统。
6.进一步的,所述驾驶中心控制着无人驾驶装置和无人机的操作,无人驾驶装置包括无人驾驶系统、gps模块和自动驾驶模块,无人机包括无人机系统、无人机gps模块、摄像头模块和热成像仪。
7.进一步的,所述支架包括支撑板,所述支撑板上活动连接有手抬架。
8.进一步的,所述消防泵包括发动机和水泵,所述发动机上安装有电子点火开关和电子熄火开关,所述发动机上端连接有消声器和排气装置,所述发动机一端连接有传动轴,所述传动轴与水泵连接,所述水泵一侧安装有进水口,所述进水口前端连接有过滤止回阀,所述进水口另一端安装有出水口,所述出水口前端安装有出水口压力检测装置,所述出水口后端安装有分水器。
9.进一步的,所述车轮装置包括动轴,所述动轴上活动安装有所述车轮支架,所述车轮支架上固定连接有车轮,所述动轴由动轴主体和键组成,所述动轴主体上设有键槽,车轮支架上设有空槽,空槽均匀设置有4个。
10.进一步的,所述车轮装置包括动轴,所述动轴上活动安装有所述车轮支架,所述车轮支架上固定连接有车轮,所述动轴由动轴主体和键组成,所述动轴主体上设有键槽,车轮支架上设有空槽,空槽均匀设置有4个。
11.进一步的,所述反馈系统为闭环控制系统。
12.进一步的,所述水泵壳体采用铝合金制作而成。
13.进一步的,所述过滤止回阀具体为不锈钢法兰过滤止回阀。
14.进一步的,所述键空槽与所述动轴主体、所述键槽和键之间的连接位置可以变化。
15.本发明的有益效果是:
16.本发明可以让操作者将支架连同消防泵从车体上拆卸下来后,通过手抬架抬走,方便了操作,在道路不利,车辆运输困难的情况下,也能够方便用人力来进行移动;通过改变键空槽与动轴主体、键槽和键之间的连接位置,从而来调节车轮与车体的相对高度,使得在消防泵车比较复杂的环境下也能够方便移动;通过触摸屏来控制各相关部件消防泵和车体的运作,使专业人员能够有效而方便操控该泵装置;通过无人驾驶装置与无人机的有效结合来使专业人员及早发现火情,使得无人驾驶消防泵车能准确而快速的进入火灾发生地。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍:
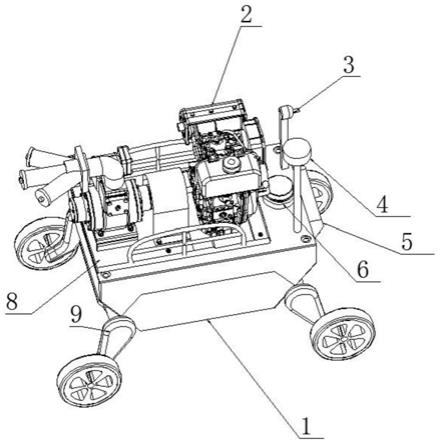
18.图1为本发明立体结构组合示意图;
19.图2为本发明立体结构分解示意图;
20.图3为消防泵分解立体结构示意图;
21.图4为消防泵第一局部立体结构示意图;
22.图5为消防泵第二局部立体结构示意图;
23.图6为车轮立体结构示意图;
24.图7为动轴结构分解示意图;
25.图8为车轮支架立体结构示意图;
26.图9为系统控制框架图;
27.图10为操作模式框架图。
28.附图标号为:1
‑
车体、1
‑
1控制系统装置、1
‑1‑1‑
控制器、1
‑1‑2‑
信号处理器、1
‑1‑3‑
反馈系统、1
‑1‑4‑
电源停止键、1
‑1‑5‑
电源开启键、1
‑1‑‑6‑
触摸屏驱动电路、1
‑1‑‑7‑
触摸屏、2
‑
消防泵、2
‑1‑
油箱、2
‑2‑
电子点火开关、2
‑3‑
发动机、2
‑4‑
电子熄火开关、2
‑5‑
传动轴、2
‑6‑
消声器、2
‑7‑
排气装置、2
‑8‑
水泵、2
‑9‑
进水口、2
‑
10
‑
出水口、2
‑
11
‑
出水口压力检测装置、2
‑
12
‑
过滤止回阀、3
‑
红外热像仪、4
‑
激光测距仪、5
‑
摄像头、6
‑
测温仪、7
‑
分水器、8
‑
支架、8
‑1‑
支撑板、8
‑2‑
手抬架、9
‑
车轮装置、91
‑
动轴、911
‑
动轴主体、9111
‑
键槽、912
‑
键、92
‑
车轮支架、921
‑
空槽、93
‑
车轮、10
‑
驾驶中心、11
‑
无人机、111
‑
无人机系统、112
‑
热成
像仪、113
‑
摄像头模块、114
‑
无人机gps模块、12
‑
无人驾驶装置、121
‑
无人驾驶系统、122
‑
gps模块、123
‑
自动驾驶模块。
具体实施方式
29.下面参照附图说明本发明的具体实施方式。
30.参阅附图1—图2所示:
31.一种无人驾驶消防泵及其控制系统,包括车体1,车体1内部上安装有控制系统装置1
‑
1,车体1上部前方安装有摄像头5,摄像头5方便操作人员不在现场也可以观察前方的火情;车体1上顶面安装有红外热像仪3、激光测距仪4和测温仪6,红外热像仪3用在浓烟、黑暗、高温等环境条件下进行灭火和救援作业;激光测距仪4测算出观察带点到目标点的距离,使得操作者可以更加准确的计算出所需路程需花费的时间,从而影响决策,测温仪6测定周边的温度,可以检查火灾隐患和设备过热情况;车体下侧安装有车轮装置9,车体1上表顶面活动连接有支架8,支架8上安装有消防泵2。
32.参阅附图3—图5所示:
33.支架8包括支撑板8
‑
1和手抬架8
‑
2,支撑板8
‑
1上活动连接有手抬架8
‑
2,支架8上面活动安装有消防泵2,在道路不利,车辆运输困难的情况下,可将支架8连同消防泵8从车体1上拆卸下来后,通过手抬架8
‑
2抬走,方便了操作;消防泵2包括发动机2
‑
3和水泵2
‑
8,发动机2
‑
3上安装有电子点火开关2
‑
2和电子熄火开关2
‑
4,发动机2
‑
3上端连接有消声器2
‑
6和排气装置2
‑
7,发动机2
‑
3一端连接有传动轴2
‑
5,传动轴2
‑
5与水泵2
‑
8连接,传动轴2
‑
5将发动机内部的旋转运动传递给水泵2
‑
8,水泵2
‑
8一侧安装有进水口2
‑
9,进水口2
‑
9前端连接有过滤止回阀2
‑
12,另一侧安装有出水口2
‑
10,出水口2
‑
10前端安装有出水口压力检测装置2
‑
11,出水口2
‑
10后端安装有分水器7,通过设置有分水器7,在必要时候可以同时使用好几个出水口,提高了灭火效率,过滤止回阀2
‑
12防止杂质进入水泵2
‑
8损坏水泵配件,同时在水泵2
‑
8停机的时候可以保持水泵2
‑
8内的水不倒流,避免了再次启动水泵2
‑
8时需要灌水排气的问题。
34.参阅附图6
‑
图8所示:
35.车轮装置9包括动轴91、车轮支架92和车轮93,动轴91上活动安装有车轮支架92,车轮支架92上固定连接有车轮93,动轴91由动轴主体911和键912组成,动轴主体911上设有键槽9111,车轮支架92上设有空槽921,动轴主体911旋转时,依靠键912与键槽9111内腔和空槽921内腔之间的相互挤压来传递运动和扭矩,空槽921均匀设置有4个,通过改变键空槽921与动轴主体911、键槽9111和键912之间的连接位置,从而来调节车轮93与车体的相对高度。
36.参阅附图9所示:
37.控制系统装置1
‑
1设置有控制器1
‑1‑
1,控制器1
‑1‑
1上这只有电源开启键1
‑1‑
5和电源停止键1
‑1‑
4,控制器1
‑1‑
1连接有信号处理器1
‑1‑
2,信号处理器1
‑1‑
2通过信号控制摄像头5、激光测距仪4、测温仪6、红外热像仪3的运行,信号处理器1
‑1‑
2还连接有车轮装置9,通过信号来控制车轮装置9的动作状态,信号处理器1
‑1‑
2通过信号控制电子点火开关2
‑
2和电子细活开关2
‑
3的启动,控制器1
‑1‑
1还连接有触摸屏驱动电路1
‑1‑
6,触摸屏驱动电路1
‑1‑
6上连接有触摸屏,触摸屏驱动电路1
‑1‑
6分别与摄像头5、激光测距仪4、测温仪6、红
外热像仪3和车轮装置9之间连接有反馈系统1
‑1‑
3,该反馈系统1
‑1‑
3为闭环控制系统;操作者通过触摸屏1
‑1‑
7来控制各相关部件的运作。
38.参阅附图10所示:
39.驾驶中心10控制着无人驾驶装置12和无人机11的操作,无人驾驶装置12包括无人驾驶系统121、gps模块122和自动驾驶模块123,无人机11包括无人机系统111、无人机gps模块114、摄像头模块113和热成像仪112,gps模块122检测无人驾驶消防泵车的当前的位置信息,并将检测到的无人驾驶消防泵车的当前的位置信息传送给无人驾驶系统,自动驾驶模块123将计算得到的当前的位姿状态发送给无人驾驶系统121,无人驾驶系统121对gps模块122传送来的无人驾驶消防泵车的当前的位置信息和自动驾驶模块123传送来的当前的位姿信息进行融合处理,生成指示用的位姿信息和导航路径信息,并利用该指示用的位姿信息和导航路径信息对无人驾驶消防泵车进行闭环控制,使无人驾驶消防泵车按照既定的速度及路径运行。
40.上述仅为本发明的具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。