1.本实用新型涉及消防救援设备技术领域,特别是涉及一种绳索救援机器人的调速手柄。
背景技术:
2.在高层建筑灾害事故救援中,在正常疏散通道被堵时可通过绳索救援机器人运送救援设备以及伤员,能够大大提升救援效率,并且降低救援人员的伤亡。目前广泛采用的救援绳索救援方式为机械师救援缓降器,使用效率低,不能快速上升、下降,同时对使用者体力有一定的消耗。现有的绳索救援机器人,不可通过手柄进行调速实现即走即停,使用感不佳,在慌乱情况下容易发生误操作。
技术实现要素:
3.为了克服上述现有技术的不足,本实用新型提供了一种绳索救援机器人的调速手柄。其结构简单,能够据手柄旋转的角度大小调节机器人行进速度,提高了绳索救援机器人的使用感和安全性。
4.本实用新型的技术方案具体如下。
5.一种绳索救援机器人的调速手柄,其包括手柄、第一手柄固定座和第二手柄固定座;第一手柄固定座、第二手柄固定座分别设置在手柄的两端,形成转动连接;其中:
6.第一手柄固定座包括第一固定座、弹簧固定座、拉伸弹簧和第一固定座端盖;第一固定座为中间开孔结构,第一固定座端盖固定连接在第一固定座上开孔的外端,第一固定座端盖内部设置限位凹槽,弹簧固定座通过第一轴承安装在第一固定座上开孔的另一端,弹簧固定座和手柄连接,拉伸弹簧一端固定在第一固定座的开孔内,另一端通过弹簧固定销固定在弹簧固定座上,弹簧固定销的一端置于第一固定座端盖内部的限位凹槽内;
7.第二手柄固定座包括第二固定座、磁铁固定座、磁铁、行程开关、磁性编码器、第二固定座端盖;第二固定座为中间开孔结构,第二固定座端盖固定连接在第二固定座上开孔的外端,磁铁固定座通过第二轴承安装在第二固定座上开孔的另一端,磁铁固定座和手柄连接,磁铁固定座的轴上设置凹槽,凹槽内放置磁铁,磁铁固定座的轴外周上设置尖端凸起,第二固定座端盖内侧设置磁性编码器,磁性编码器内侧设置行程开关,行程开关固定连接在第二固定座的开孔内,行程开关和磁铁固定座上的尖端凸起相触碰。
8.本实用新型中,手柄上设置手柄橡胶塞。
9.本实用新型中,手柄橡胶塞呈长腰型,手柄橡胶塞为4个。
10.本实用新型中,手柄的两端分别设置凹槽,弹簧固定座和磁铁固定座的一端分别设置凸起,凸起和凹槽相匹配,使得第一手柄固定座、第二手柄固定座和手柄的两端分别形成转动连接。
11.本实用新型中,第二固定座上设置密封槽,密封槽内放置第三密封圈。
12.本实用新型中,第一固定座的下方设置第一密封圈,第二固定座的下方设置第二
密封圈。
13.本实用新型所采用的技术方案是:
14.与现有技术相比,本实用新型的有益效果是使用者可通过手柄对机器人进行上升下降停止以及速度的调节,操作简单,能够有效防止误操作,松手即停,提高了机器人使用的安全性。
附图说明
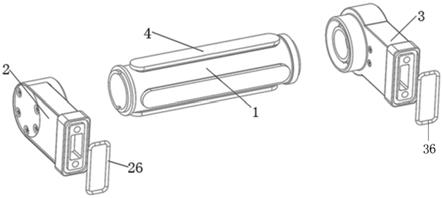
15.图1为调速手柄整体示意图。
16.图2为调速手柄整体爆炸图。
17.图3为第一手柄固定座爆炸图。
18.图4为第二手柄固定座爆炸图。
19.图5位第一固定座端盖示意图。
20.图6调速手柄安装示意图。
21.图7调速手柄工作状态1。
22.图8调速手柄工作状态2。
23.图中标号:1
‑
手柄,2
‑
第一手柄固定座,20
‑
第一固定座,21
‑
第一固定座端盖,22
‑
拉伸弹簧,23
‑
弹簧固定销,24
‑
第一轴承,25
‑
弹簧固定座,26
‑
第一密封圈,27
‑
限位凹槽,3
‑
第二手柄固定座, 30
‑
第二固定座,31
‑
第二固定座端盖,32
‑
磁性编码器,33
‑
第三密封圈,34
‑
行程开关,35
‑
第二轴承,36
‑
第二密封圈,37
‑
磁铁,38
‑
磁铁固定座,4
‑
手柄橡胶塞。
具体实施方式
24.下面结合附图对本实用新型进一步说明。
25.实施例1
26.实施例中,提供一种绳索救援机器人的调速手柄,如图1
‑
图6所示,其包括手柄1,第一手柄固定座2,第二手柄固定座3;第一手柄固定座1、第二手柄固定座2设置在手柄1的两端,第一手柄固定座1、第二手柄固定座2和手柄1形成转动连接,使得手柄1可绕第一手柄固定座1、第二手柄固定座2的轴线转动;手柄1的两端设置凹槽,外表面设置4个长腰型安装孔,手柄橡胶塞有4个,插入手柄长腰型安装孔内。
27.第一手柄固定座2包括第一固定座20、第一固定座端盖21、拉伸弹簧22、弹簧固定销23、第一轴承24、弹簧固定座25和第一密封圈26;第一固定座20为中间开孔结构,第一轴承24置于第一固定座20与弹簧固定座25中间,弹簧固定座25可绕第一固定座20的轴线自由转动,弹簧固定座25的一端设置凸起,与手柄1一端的凹槽相匹配,手柄1可带动弹簧固定座25转动;第一固定座20的开孔内部设置弹簧固定孔位,弹簧固定座25内部设置弹簧固定销孔位,拉伸弹簧22的一端固定于弹簧固定孔位,另一端通过弹簧固定销23固定于弹簧固定座25中。第一固定座端盖21置于第一固定座20上开孔的一端外部,通过螺丝与第一固定座20固定。第一固定座端盖21内部设置限位凹槽27,弹簧固定销23一端置于限位凹槽27内部,能够限制弹簧固定销23在一定行程内运动,从而限制手柄1的旋转角度。第一密封圈26设置在第一固定座20的下部,第一密封圈26能防止水通过20底部的螺丝孔位进入到机器人主体的内部。
28.第二手柄固定座3包括第二固定座30、第二固定座端盖31、磁性编码器32、第三密封圈33、行程开关34、第二轴承35、第二密封圈36、磁铁37和磁铁固定座38;第二固定座30为中间开孔结构,其一端带有密封槽,第三密封圈33置于密封槽内。第二固定座端盖31置于第二固定座30上开孔的一端外侧,通过螺丝与第二固定座30固定。磁性编码器32置于第二固定座端盖31内侧,通过螺丝与第二固定座端盖31固定。第二轴承35置于第二固定座30与磁铁固定座38中间,磁铁固定座38可绕第二固定座30的轴线自由转动。磁铁固定座38的一端设置凸起与手柄1的一端凹槽相匹配,手柄1可带动磁铁固定座38转动。磁铁37置于磁铁固定座38一端凹槽内并通过胶粘固定。磁铁固定座38带有尖端凸起,尖端凸起38位置恰好触碰行程开关34。行程开关34通过螺丝固定连接在第二固定座30开孔内。第二固定座30底部带有走线孔,用于行程开关34以及磁性编码器32的信号线走线,信号线通过走线孔进入机器人主体内部的控制板,第二密封圈36设置在第二固定座30的下部,第二密封圈作用能防止水进入第二固定座30底座内部以及机器人主体内部。
29.如图6所示,本实用新型的调速手柄通过螺丝安装于绳索救援机器人侧面,绳索安装于机器人绳盘后,调速手柄初始位置为图7工作状态,图3中拉伸弹簧22在拉伸作用下拉紧弹簧固定销23,弹簧固定销23被限制在第一固定座端盖21的限位凹槽27上端,此时,如图7磁铁固定座38的尖端凸起压紧行程开关34,开关处于关闭状态。在使用者需要使用机器人进行上升下降运动时,逆时针转动手柄1,磁铁固定座38跟随手柄1旋转,此时进入如图8工作状态,磁铁固定座38的尖端凸起离开行程开关34,行程开关34开启。此时磁性编码器32感应磁铁37转动角度,机器人控制系统通过转动角度值调整机器人上升、下降速度值,速度大小随手柄1的旋转角度增加而增加。到达高度后,使用者松开手柄,调速手柄在拉伸弹簧22作用下,恢复至工作状态1。