1.本发明涉及一种消防设备,尤其涉及一种火焰探测机器人。
背景技术:
2.主要包括火灾现场的人员救援,重要设施设备、文物的抢救,重要财产的安全保卫与抢救,扑灭火灾等。目的是降低火灾造成的破坏程度,减少人员伤亡和财产损失。现有技术中,尤其是针对山林灭火需要消防人员进入火场进行灭火,但这样对消防人员安全隐患过大,造成消防人员伤亡,且在烟雾、高温状态下也很难准确找准火源,难度较高,因此,存在改进空间。
技术实现要素:
3.本发明的目的就在于为了解决上述问题而提供一种火焰探测机器人。
4.本发明通过以下技术方案来实现上述目的:
5.本发明包括传感器组件、灭火装置、行走驱动装置、控制系统和监控控制中心,所述传感器组件、所述灭火装置、所述控制系统均设置于所述行走驱动装置上,所述传感器组件的信号输出端与所述控制系统的信号输入端连接,所述控制系统的控制输出端与所述行走驱动装置和所述灭火装置连接,所述控制系统与所述监控控制中心之间无线连接。
6.进一步,所述传感器组件包括卫星定位传感器、图像传输摄像头、环境温度传感器、环境烟雾传感器、陀螺仪传感器和红外测距传感器,所述卫星定位传感器、所述环境温度传感器、所述环境烟雾传感器、所述陀螺仪传感器设置于所述行走驱动装置内,所述图像传输摄像头和所述红外测距传感器设置于所述行走驱动装置上,所述卫星定位传感器、图像传输摄像头、环境温度传感器、环境烟雾传感器、陀螺仪传感器和红外测距传感器的信号输出端均与所述控制系统的信号输入端连接。
7.进一步,所述控制系统包括传感器数据采集器、核心数据处理器、电机驱动模块、无线信号传输天线和无线数据传输模块,所述卫星定位传感器、图像传输摄像头、环境温度传感器、环境烟雾传感器、陀螺仪传感器和红外测距传感器的信号输出端与所述传感器数据采集器的信号输入端连接,所述传感器数据采集器的信号输出端与所述核心数据处理器的信号输入端连接,所述核心数据处理器的控制信号输出端与所述电机驱动模块连接,所述电机驱动模块的控制信号输出端与所述行走驱动装置和所述灭火装置的控制端连接,所述核心数据处理器的信号传输端与所述无线数据传输模块连接,所述无线数据传输模块通过所述无线信号传输天线与所述监控控制中心无线连接。
8.进一步,所述灭火装置由灭火喷水喷头、灭火供水接头、喷头左右驱动电机、喷头上下驱动电机和喷头阀门驱动电机组成,所述灭火供水接头的一端接入水源,所述灭火供水接头的另一端通过所述喷头左右驱动电机、所述喷头上下驱动电机和所述喷头阀门驱动电机与所述灭火喷水喷头连接,所述喷头左右驱动电机控制所述灭火喷水喷头左右摆动,所述喷头上下驱动电机控制所述灭火喷水喷头上下摆动,所述喷头阀门驱动电机控制所述
灭火喷水喷头的开阀程度,所述喷头左右驱动电机、所述喷头上下驱动电机和所述喷头阀门驱动电机的控制信号输入端与所述电机驱动模块的控制信号输出端连接。
9.进一步,所述行走驱动装置由机器人本体、机器人行走驱动电机和行走驱动履带组成,所述机器人行走驱动电机和所述行走驱动履带均为两组,两组所述行走驱动履带分别通过一个所述机器人行走驱动电机控制驱动,所述机器人行走驱动电机与所述电机驱动模块的控制信号输出端连接,两个所述行走驱动履带分别设置于所述机器人本体的两侧,所述机器人行走驱动电机与所述机器人本体固定连接。
10.优选的,所述灭火供水接头的输入端接入两根细管,所述灭火供水接头的输出端为粗管。
11.本发明的有益效果在于:
12.本发明是一种火焰探测机器人,与现有技术相比,本发明通过消防人员远程操控,从而减少消防人员直接进入火场冒险灭火的情况,能够有效降低消防人员的伤亡,此外,通过机器人上搭载的传感器能够准确识别火源位置,从而进行灭火,使用方便,具有推广应用的价值。
附图说明
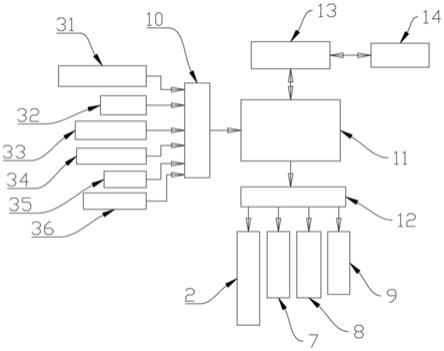
13.图1是本发明的系统结构原理框图;
14.图2是本发明的一侧结构示意图;
15.图3是本发明的另一侧结构示意图;
16.图4是本发明的外部结构示意图。
17.图中:机器人本体1、机器人行走驱动电机2、传感器组件3、灭火喷水喷头4、灭火供水接头5、无线信号传输天线6、喷头左右驱动电机7、喷头上下驱动电机8、喷头阀门驱动电机9、传感器数据采集器10、核心数据处理器11、电机驱动模块12、无线数据传输模块13、监控控制中心14、行走驱动履带15、卫星定位传感器31、图像传输摄像头32、环境温度传感器33、环境烟雾传感器34、陀螺仪传感器35、红外测距传感器36。
具体实施方式
18.下面结合附图对本发明作进一步说明:
19.如图1
‑
4所示:本发明包括传感器组件3、灭火装置、行走驱动装置、控制系统和监控控制中心14,所述传感器组件3、所述灭火装置、所述控制系统均设置于所述行走驱动装置上,所述传感器组件3的信号输出端与所述控制系统的信号输入端连接,所述控制系统的控制输出端与所述行走驱动装置和所述灭火装置连接,所述控制系统与所述监控控制中心14之间无线连接。
20.进一步,所述传感器组件3包括卫星定位传感器31、图像传输摄像头32、环境温度传感器33、环境烟雾传感器34、陀螺仪传感器35和红外测距传感器36,所述卫星定位传感器31、所述环境温度传感器33、所述环境烟雾传感器34、所述陀螺仪传感器35设置于所述行走驱动装置内,所述图像传输摄像头32和所述红外测距传感器36设置于所述行走驱动装置上,所述卫星定位传感器31、图像传输摄像头32、环境温度传感器33、环境烟雾传感器34、陀螺仪传感器35和红外测距传感器36的信号输出端均与所述控制系统的信号输入端连接。
21.进一步,所述控制系统包括传感器数据采集器10、核心数据处理器11、电机驱动模块12、无线信号传输天线6和无线数据传输模块13,所述卫星定位传感器31、图像传输摄像头32、环境温度传感器33、环境烟雾传感器34、陀螺仪传感器35和红外测距传感器36的信号输出端与所述传感器数据采集器10的信号输入端连接,所述传感器数据采集器10的信号输出端与所述核心数据处理器11的信号输入端连接,所述核心数据处理器11的控制信号输出端与所述电机驱动模块12连接,所述电机驱动模块12的控制信号输出端与所述行走驱动装置和所述灭火装置的控制端连接,所述核心数据处理器11的信号传输端与所述无线数据传输模块13连接,所述无线数据传输模块13通过所述无线信号传输天线6与所述监控控制中心14无线连接。
22.进一步,所述灭火装置由灭火喷水喷头4、灭火供水接头5、喷头左右驱动电机7、喷头上下驱动电机8和喷头阀门驱动电机9组成,所述灭火供水接头5的一端接入水源,所述灭火供水接头5的另一端通过所述喷头左右驱动电机7、所述喷头上下驱动电机8和所述喷头阀门驱动电机9与所述灭火喷水喷头4连接,所述喷头左右驱动电机7控制所述灭火喷水喷头4左右摆动,所述喷头上下驱动电机8控制所述灭火喷水喷头4上下摆动,所述喷头阀门驱动电机9控制所述灭火喷水喷头4的开阀程度,所述喷头左右驱动电机7、所述喷头上下驱动电机8和所述喷头阀门驱动电机9的控制信号输入端与所述电机驱动模块12的控制信号输出端连接。
23.进一步,所述行走驱动装置由机器人本体1、机器人行走驱动电机2和行走驱动履带15组成,所述机器人行走驱动电机2和所述行走驱动履带15均为两组,两组所述行走驱动履带15分别通过一个所述机器人行走驱动电机2控制驱动,所述机器人行走驱动电机2与所述电机驱动模块12的控制信号输出端连接,两个所述行走驱动履带15分别设置于所述机器人本体1的两侧,所述机器人行走驱动电机2与所述机器人本体1固定连接。
24.优选的,所述灭火供水接头5的输入端接入两根细管,所述灭火供水接头5的输出端为粗管。
25.本发明的工作原理如下:
26.本发明使用时,通过监控控制中心14远程控制机器人行走驱动电机2驱动行走驱动履带15,将整个机器人移动至火灾区域,通过卫星定位传感器31监测机器人的位置,通过图像传输摄像头32实时传输画面,通过环境温度传感器33感应环境温度,通过环境烟雾传感器34感应环境的烟雾,通过陀螺仪传感器35感应机器人的角度,通过红外测距传感器36感应目标距离,核心数据处理器11通过陀螺仪传感器35的信号自动调整喷头左右驱动电机7和喷头上下驱动电机8,使灭火喷水喷头4保持平行位置,通过卫星定位传感器31感应到的火灾目标位置,核心数据处理器11通过电机驱动模块12控制喷头左右驱动电机7和喷头上下驱动电机8控制灭火喷水喷头4对准目标,通过核心数据处理器11判断红外测距传感器36的目标距离信号,从而控制喷头阀门驱动电机9的开阀程度,从而控制灭火水源准确对火灾灭火位置进行喷水,喷水采用两根细水管连接灭火供水接头5,因细水管比粗水管柔软,从而利于机器人的行走。
27.以上显示和描述了本发明的基本原理和主要特征及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变
化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。