1.本实用新型涉及机械领域,尤其涉及一种消防机器人。
背景技术:
2.对于有火灾隐患的环境或者火灾现场,会存在一些危险系数高的环境,若消防人员贸然进入会有很大的风险,因此需要对危险环境进行勘察,确认内部情况后消防人员才能进入。为此,本实用新型提出一种消防机器人用于解决上述问题。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种消防机器人。
4.为达到以上目的,本实用新型采用的技术方案为:一种消防机器人,包括底板,所述底板顶部的两端对称固定有固定板,两个所述固定板的相对侧分别通过螺钉固定有第一无刷减速电机和第二无刷减速电机,所述第一无刷减速电机和第二无刷减速电机的相背侧安装有转动部件。
5.所述底板顶部的一侧固定有支撑架,所述底板上方的另一侧设有支撑杆,所述支撑杆固定于两个固定板之间,所述支撑架与支撑杆的顶部共同固定有固定架,所述固定架的顶部固定有盒体,所述盒体的顶部固定有盖板。
6.所述盒体内部的一端安装有控制结构,所述盒体内部的另一端设有无线部件。
7.所述盖板的顶部安装有载重结构,所述盖板的顶部通过螺钉固定有可燃气体检测仪,所述可燃气体检测仪的顶部穿过载重结构并延伸出去。
8.优选的,所述转动部件包括两个第一齿轮,所述第一无刷减速电机和第二无刷减速电机的输出轴分别贯穿两个固定板并与两个第一齿轮固定连接,所述第一齿轮的一侧设有第二齿轮,所述第一齿轮与第二齿轮相啮合,所述第二齿轮的外圈设有三角履带,所述三角履带与第二齿轮的转动轴之间通过连接板固定连接。
9.优选的,所述电池的外侧设有隔热铝箔和电加热片,所述电池的顶部固定有数显控制模块。
10.优选的,所述控制结构包括有电池,所述有电池通过螺钉固定与盒体内部的一端,所述电池的两侧分别设有第一正弦波控制器和第二正弦波控制器,所述第一正弦波控制器和第二正弦波控制器均通过螺钉固定于盒体的内部。
11.优选的,所述载重结构包括载重顶框,所述载重顶框通过螺栓固定于盖板的顶部,所述载重顶框的一端通过螺钉与固定架固定连接。
12.与现有技术相比,本实用新型具有以下有益效果:本装置能够通过无线控制模块和无线网络控制模块接受外界人员发出的信号并对装置进行控制,辅助以图传模块,使其实现网络覆盖环境下的超视距控制和无网络覆盖时的视距内控制双重功能,减小对外界使用环境的依赖,使得装置能够在危险环境内部进行前进和后退、转弯等行动,装置在内部进
行勘察,在发现存在可燃气体的危险后能够发出警报,并且能够通过载重顶框携带不同消防装置进行灭火救援、排烟降温、侦查搜寻等任务,在不加装消防装置的情况下则可用于大型灾害现场的物资输转作业,使得消防人员在遇到危险环境时能够通过装置进行全面勘察,并且能够通过安装不同装置协助进行灭火救援作业,保证了消防人员的安全。
附图说明
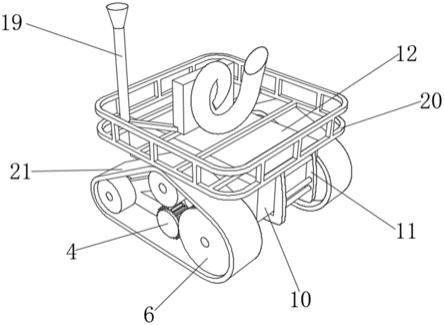
13.图1为本实用新型的整体结构示意图;
14.图2为本实用新型的电机及车架装备结构示意图;
15.图3为本实用新型的内部结构布置结构示意图。
16.图中:底板1、固定板2、第一无刷减速电机3、第一齿轮4、连接板5、第二齿轮6、支撑架7、第二无刷减速电机8、支撑杆9、盒体10、固定架11、盖板12、电池13、第一正弦波控制器14、第二正弦波控制器15、无线控制模块16、无线网络控制模块17、数显控制模块18、可燃气体检测仪19、载重顶框20、三角履带21。
具体实施方式
17.以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
18.如图1
‑
3所示的一种消防机器人,包括底板1,底板1顶部的两端对称固定有固定板2,两个固定板2的相对侧分别通过螺钉固定有第一无刷减速电机3和第二无刷减速电机8,第一无刷减速电机3和第二无刷减速电机8的相背侧安装有转动部件,转动部件包括两个第一齿轮4,第一无刷减速电机3和第二无刷减速电机8的输出轴分别贯穿两个固定板2并与两个第一齿轮4固定连接,第一齿轮4的一侧设有第二齿轮6,第一齿轮4与第二齿轮6相啮合,第二齿轮6的外圈设有三角履带21,三角履带21与第二齿轮6的转动轴之间通过连接板5固定连接,底板1顶部的一侧固定有支撑架7,底板1上方的另一侧设有支撑杆9,支撑杆9固定于两个固定板2之间,支撑架7与支撑杆9的顶部共同固定有固定架11,固定架11的顶部固定有盒体10,盒体10的顶部固定有盖板12。
19.实施方式具体为:底板1能够连接两端的固定板2,固定板2能够方便第一无刷减速电机3和第二无刷减速电机8的安装,第一无刷减速电机3与第一正弦波控制器14通过电线连接,第二无刷减速电机8与第二正弦波控制器15通过电线连接,在第一无刷减速电机3和第二无刷减速电机8正向转动时装置前进,在第一无刷减速电机3和第二无刷减速电机8反向转动时装置后退,在第一无刷减速电机3停止且第二无刷减速电机8转动时装置向一侧转弯,在第一无刷减速电机3转动且第二无刷减速电机8静止时装置向另一侧转弯,使得装置能够方便在危险环境内部移动,第一无刷减速电机3和第二无刷减速电机8的输出轴能够分别带动两个第一齿轮4转动,第一齿轮4带动第二齿轮6转动,第二齿轮6带动三角履带21传送,连接板5能够连接第二齿轮6和三角履带21,支撑杆9和支撑架7能够支撑安装固定架11,固定架11能够方便盒体10的安装,盖板12能够方便盒体10内部结构的安装和后期维护,底板1和固定板2、连接板5、支撑架7、支撑杆9、盒体10、固定架11、盖板12、载重顶框20均为2.5mm不锈钢切割、焊接制成。
20.盒体10内部的一端安装有控制结构,控制结构包括有电池13,有电池13通过螺钉
固定与盒体10内部的一端,电池13的两侧分别设有第一正弦波控制器14和第二正弦波控制器15,第一正弦波控制器14和第二正弦波控制器15均通过螺钉固定于盒体10的内部,盒体10内部的另一端设有无线部件,盖板12的顶部安装有载重结构,载重结构包括载重顶框20,载重顶框20通过螺栓固定于盖板12的顶部,载重顶框20的一端通过螺钉与固定架11固定连接,盖板12的顶部通过螺钉固定有可燃气体检测仪19,可燃气体检测仪19的顶部穿过载重结构并延伸出去。
21.实施方式具体为:电池13能够为装置提供电源,第一正弦波控制器14和第二正弦波控制器15均与电池13通过电线连接,第一正弦波控制器14能够控制第一无刷减速电机3的转动,第二正弦波控制器15能够控制第二无刷减速电机8的转动,无线控制模块16能够对第一正弦波控制器14和第二正弦波控制器15进行控制,在第一正弦波控制器14和第二正弦波控制器15上实施操作者传达的命令,无线部件包括无线控制模块16,无线控制模块16通过螺钉固定于盒体10内部的另一端,无线控制模块16的一侧设有无线网络控制模块17,无线网络控制模块17通过螺钉固定于盒体10的内部,无线网络控制模块17能够与外界的操作者通过无线网络进行连接,辅助以图传模块,使其实现网络覆盖环境下的超视距控制和无网络覆盖时的视距内控制双重功能,减小对外界使用环境的依赖,将操作者的命令传达给无线控制模块16,无线控制模块16和无线网络控制模块17均与电池13通过电线连接,数显控制模块18能够实时显示电池13的数据,可燃气体检测仪19与电池13通过电线连接,能够在危险环境中进行检测,当检测到可燃气体后会发出警报,机体的盖板12与载重顶框20之间有三角形承重支架,防止机体在急转弯时因惯性和剪切力导致顶框形变或脱离,载重顶框20能够方便装置携带不同消防装置进行灭火救援、排烟降温、侦查搜寻等任务,在不加装消防装置的情况下则可用于大型灾害现场的物资输转作业。
22.本实用新型工作原理:本装置在使用时,消防员将装置放入危险环境,并在外界通过控制装置下达命令,无线网络控制模块17接收到命令后传达给无线控制模块16,无线控制模块16控制第一正弦波控制器14和第二正弦波控制器15对第一无刷减速电机3和第二无刷减速电机8进行操作,使得第一无刷减速电机3和第二无刷减速电机8转动和停止,从而操作装置在危险环境内部进行前进和后退、转弯等操作,对环境内部进行勘察,在装置移动过程中,可燃气体检测仪19对环境进行探测,探测到空气内含有可燃气体后,可燃气体检测仪19会发出声光报警,提醒外部的消防人员,同时装置在进入危险环境内部时,能够通过载重顶框20装载灭火救援设备,方便消防员对环境进行灭火救援。
23.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内,本实用新型要求的保护范围由所附的权利要求书及其等同物界定。