1.本实用新型涉及机器人技术领域,具体涉及一种智能救援机器人。
背景技术:
2.今天,越来越多的人更加注重生活的品质,创和谐社区,建文明城市,已经成为各城市共同追求的目标,防盗窗存在的问题日益变得突出,特别是防盗窗带来的消防隐患。在消防部门眼里,防盗窗往往带来巨大的隐患:一旦居民楼发生火灾,火灾现场的居民往往无处可逃!而防盗窗常常会延缓消防官兵的救火速度,从而带来更大的伤亡。人们往往看重防盗窗的安全防范作用,以为其严密的防范功能而把窃贼“挡”在了门外,殊不知同时也把自己“困”在了里面。如果发生火灾之类的突发事件,居民便会因防盗窗的围困而失去一条很好的逃生之路。
技术实现要素:
3.本实用新型的目的在于针对现有技术的缺陷和不足,提供一种智能救援机器人。
4.为实现上述目的,本实用新型采用的技术方案是:一种智能救援机器人,包括行走机构,所述行走机构上设置底板,其创新点在于:所述底板上分别设置急救装置、多个切割装置及放绳装置;所述急救装置包括急救箱,所述急救箱内放置急救物品,所述急救箱内还设置灭火器,所述灭火器的管道上设置电磁阀,所述急救箱的顶部设置用于放置管道的放置架;所述切割装置包括转盘,所述转盘采用电机驱动,所述转盘的上表面设置升降杆,所述升降杆的活塞杆上设置固定块,所述固定块上横向设置伸缩杆,所述伸缩杆的前端设置切割机;所述放绳装置包括滑轨组件,所述滑轨组件上设置安装座,所述安装座采用伺服电机驱动,所述安装座上分别设置滚筒和放绳电机,所述放绳电机与滚筒之间采用皮带及皮带轮传动连接,所述滚筒上缠绕设置钢丝绳。
5.进一步的,所述放置架包括升降缸,所述升降缸的顶部设置夹套。
6.进一步的,所述升降杆上设置摄像头。
7.进一步的,所述切割装置至少包括两个,且平行设置。
8.采用上述结构后,本实用新型有益效果为:
9.本实用新型通过设置切割装置,能够实现对防盗窗的切割破除,从而在发生火灾时,能够为室内人员提供从防盗窗逃生的可能;通过设置放绳装置,能够为从防盗窗逃生的人员提供金属材质的逃生绳索,加大了发生火灾时室内人员的存活概率;通过设置急救装置能够为室内人员提供急救物品及简单的灭火,提高存活概率。
附图说明
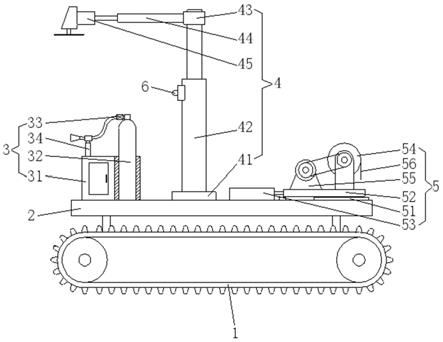
10.图1为本实用新型的结构示意图。
11.附图标记说明:
12.1行走机构、2底板、3急救装置、31急救箱、32灭火器、33电磁阀、 34放置架、4切割
装置、41转盘、42升降杆、43固定块、44伸缩杆、 45切割机、5放绳装置、51滑轨组件、52安装座、53伺服电机、54滚筒、55放绳电机、56钢丝绳、6摄像头。
具体实施方式
13.下面结合附图对本实用新型作进一步的说明。
14.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施方式,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施方式仅用以解释本实用新型,并不用于限定本实用新型。
15.参看图1,一种智能救援机器人,包括行走机构1,行走机构1上设置底板2,底板2上分别设置急救装置3、多个切割装置4及放绳装置5;急救装置3包括急救箱31,急救箱31内放置急救物品,急救箱31内还设置灭火器 32,灭火器32的管道上设置电磁阀33,急救箱31的顶部设置用于放置管道的放置架34;切割装置4包括转盘41,转盘41采用电机驱动,转盘41的上表面设置升降杆42,升降杆42的活塞杆上设置固定块43,固定块43上横向设置伸缩杆44,伸缩杆44的前端设置切割机45;放绳装置5包括滑轨组件 51,滑轨组件51上设置安装座52,安装座52采用伺服电机53驱动,安装座 52上分别设置滚筒54和放绳电机55,放绳电机55与滚筒54之间采用皮带及皮带轮传动连接,滚筒54上缠绕设置钢丝绳56。具体的,急救箱31能够为室内人员提供急救物品,而且通过灭火器32可以进行简单的灭火,提高存活概率;通过转盘41调整方向后,再通过升降杆42调整切割高度,再通过伸缩杆44靠近防盗窗,再通过切割机45完成对防盗窗的切割,从而在发生火灾时,能够为室内人员提供从防盗窗逃生的可能;通过设置伺服电机53和滑轨组件51将安装座52移出底板,处于悬空状态,然后再启动放绳电机55 转动滚筒54,使得包绕在滚筒54上的钢丝绳56从窗外向下运动,从而可使得人员沿钢丝绳下滑到远离火区的下层居民防盗窗外,或者直接下滑到地面,伺服电机53和滑轨组件51能够使得钢丝绳56远离窗外,远离火灾,提高存活概率;机器人内置用于远程控制机器人的远程控制器。
16.本实施例中,放置架包括升降缸,升降缸的顶部设置夹套。夹套用于夹取管道,通过升降缸能够对管道进行升降调节,利于灭火。
17.本实施例中,升降杆42上设置摄像头6。摄像头6可用于实时监控屋内情况,利于救援,也便于在发生室内盗窃等情况时,能提供破案线索,挽回部分经济损失。
18.本实施例中,切割装置4至少包括两个,且平行设置。多个切割装置4 能够同时工作,提高切割效率。
19.以上所述,仅用以说明本实用新型的技术方案而非限制,本领域普通技术人员对本实用新型的技术方案所做的其它修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。
技术特征:
1.一种智能救援机器人,包括行走机构,所述行走机构上设置底板,其特征在于:所述底板上分别设置急救装置、多个切割装置及放绳装置;所述急救装置包括急救箱,所述急救箱内放置急救物品,所述急救箱内还设置灭火器,所述灭火器的管道上设置电磁阀,所述急救箱的顶部设置用于放置管道的放置架;所述切割装置包括转盘,所述转盘采用电机驱动,所述转盘的上表面设置升降杆,所述升降杆的活塞杆上设置固定块,所述固定块上横向设置伸缩杆,所述伸缩杆的前端设置切割机;所述放绳装置包括滑轨组件,所述滑轨组件上设置安装座,所述安装座采用伺服电机驱动,所述安装座上分别设置滚筒和放绳电机,所述放绳电机与滚筒之间采用皮带及皮带轮传动连接,所述滚筒上缠绕设置钢丝绳。2.根据权利要求1所述的一种智能救援机器人,其特征在于:所述放置架包括升降缸,所述升降缸的顶部设置夹套。3.根据权利要求1所述的一种智能救援机器人,其特征在于:所述升降杆上设置摄像头。4.根据权利要求1所述的一种智能救援机器人,其特征在于:所述切割装置至少包括两个,且平行设置。
技术总结
本实用新型公开了一种智能救援机器人,包括行走机构,行走机构上设置底板,底板上分别设置急救装置、多个切割装置及放绳装置;急救装置包括急救箱,急救箱内放置急救物品,急救箱内还设置灭火器,灭火器的管道上设置电磁阀,急救箱的顶部设置用于放置管道的放置架;切割装置包括转盘,转盘采用电机驱动,转盘的上表面设置升降杆,升降杆的活塞杆上设置固定块,固定块上横向设置伸缩杆,伸缩杆的前端设置切割机。本实用新型通过设置切割装置,能够实现对防盗窗的切割破除,从而在发生火灾时,能够为室内人员提供从防盗窗逃生的可能;通过设置放绳装置,能够为从防盗窗逃生的人员提供金属材质的逃生绳索,加大了发生火灾时室内人员的存活概率。员的存活概率。员的存活概率。
技术研发人员:马鹏 曹健红
受保护的技术使用者:马乎智能科技(苏州)有限公司
技术研发日:2020.11.03
技术公布日:2021/12/16