1.本实用新型涉及一种自动抓取装置,属于自动化移动技术领域。
背景技术:
2.反应管如八连管是有八个外形类似圆柱的管形成的组合体,现有的八连管主要用于化学试剂的存放,对八连管内存放的液体或者是液滴进行封闭取样或荧光检测,现有的八连管使用多是由人工操作,不仅人成本高,人工转移不仅操作及转移效率低,费时费力,与自动化的检测不匹配,而且有一些场合不适合人工操作,如辐射、病毒等环境中,若长期处于这种环境会对人体带来危害,故为了适应一些快速度、快节拍的检测分析场合,就需要一种能快速实现八连管的抓取及转移的自动抓取转移工具。
技术实现要素:
3.本实用新型针对现有技术存在的不足,提供一种结构简单,操作方便,能快速抓取并转移部件的自动抓取装置。
4.本实用新型解决上述技术问题的技术方案如下:一种自动抓取装置,包括反应管抓取机构,所述反应管抓取机构包括反应管钩爪及用于驱动反应管钩爪移动的驱动机构,所述反应管钩爪通过钩爪安装板与所述驱动机构的驱动端连接,所述反应管钩爪包括的多个并行设置的爪齿,所述爪齿之间设有与所述反应管的管径相适配的定位槽口。
5.本实用新型的有益效果是:爪齿插入到反应管的管体之间,通过爪齿与反应管之间的插装配合实现反应管的抓取,然后可通过驱动机构可实现反应管自动化的转移,转移过程钩爪与反应管定位稳定。本实用新型结构简单,操作方便,无需人工参与,降低人工成本,能对反应管进行自动、准确的抓取、转移及放置,从而满足检测过程中高速度,高效率的需求。
6.在上述技术方案的基础上,本实用新型还可以做如下改进。
7.进一步的,还包括下料辅助机构,所述下料辅助机构包括翻转倾斜气缸,所述翻转倾斜气缸设置在所述钩爪安装板上,所述钩爪与所述钩爪安装板铰接,所述翻转倾斜气缸的活塞杆通过连接臂与所述钩爪连接。
8.采用上述进一步方案的有益效果是,钩爪通过轴承与钩爪安装板连接,翻转倾斜气缸与连接臂的一端铰接,连接臂的另一端与钩爪固定连接,翻转倾斜气缸动作,能实现钩爪以轴承为转动支点倾斜翻转;翻转倾斜到一定角度后,反应管能通过自身重力从钩爪上脱出,从而将使用后的反应管丢弃到垃圾桶内。
9.进一步的,所述钩爪安装板与所述驱动机构的驱动端之间还设有伸缩移栽气缸。
10.采用上述进一步方案的有益效果是,通过伸缩移栽气缸可调整钩爪的高度,避免不同抓取机构的夹爪之间由于过于集中出现干扰。
11.进一步的,还包括移液器抓取机构,所述移液器抓取机构包括移液器安装板、设置在移液器安装板上的移液器、第一气缸及第二气缸,所述移液器安装板与所述驱动机构的
驱动端连接,所述移液器上设有枪头控制按钮及体积调节按钮,所述第一气缸用于控制所述的枪头控制按钮,所述第二气缸用于控制所述的体积调节按钮。
12.采用上述进一步方案的有益效果是,第一气缸作用于移液器的枪头控制按钮,实现移液器自动安装枪头及枪头的自动剔除,第二气缸作用于移液器的体积调节按钮,能实现移液器的自动吸液及排液,多个独立控制的抓取机构及其对应的驱动系统,导致抓取装置结构复杂,一个驱动系统上可放置多个抓取机构,实现多个抓取机构在三维空间内的动作,节约抓取装置的安装空间。
13.进一步的,还包括真空泵及混合器抓取机构,所述真空泵及混合器抓取机构包括用于抓取真空泵及混合器的气动夹爪,所述气动夹爪通过夹爪安装板与所述驱动机构的驱动端连接,所述气动夹爪包括一对夹爪及用于驱动一对夹爪开合的夹爪气缸,所述夹爪气缸设置在所述夹爪安装板上。
14.采用上述进一步方案的有益效果是,在该驱动机构上还有用于夹持其它部件的抓取机构,具体是可以抓取真空泵、混合器,通过气动夹爪实现真空泵、混合器的抓取及转移,气动夹爪抓取真空泵或混合器,然后在驱动机构的作用下可移至要求转移的位置。通过一个驱动机构实现多个抓取机构的驱动,充分利用设备的安装空间。
15.进一步的,所述夹爪安装板通过伺服电机与所述驱动机构的驱动端连接,一对所述夹爪闭合时其一侧形成与所述混合器的外轮廓相适配的仿形槽。
16.采用上述进一步方案的有益效果是,现有的混合器的开关完全采用人工操作,一方面工人劳动强度大,受人为因素影响比较大,往往拧紧力矩难以满足技术要求,为了满足自动化的要求,故增加了混合器自动拧紧或拧松的结构,当混合器需要拧开时,夹爪闭合夹紧混合器,利用其一侧有与混合器轮廓相适配的仿形槽,在伺服电机的作用下可以转动可轻松的打开混合器,更加稳定,便于从混合器取液,而夹爪的另一侧则用于夹取真空泵,一夹爪两用,结构更加紧凑,节约抓取机构占据的空间。伺服电机能准确控制旋转圈数;与驱动机构的z向控制的上下运动,实现旋转运动和上下运动同时动作;通过旋转速度和上下运动不同的速度匹配,满足混合器螺距的螺旋运动,实现混合器的拧入拧出,一夹爪既可以用来转移真空泵,还可以用来转移混合器及实现混合器拧开及拧紧操作,结构简单紧凑,合理布局,充分利用箱体内的空间。
17.进一步的,所述伺服电机通过气动旋转接头与所述夹爪安装板连接。
18.采用上述进一步方案的有益效果是,伺服电机通过安装板与驱动机构的驱动端连接,气动旋转接头可固定在安装板上,其通过联轴器与伺服电机的输出轴连接,气动夹爪安装在气动旋转接头旋转端,通过气动旋转接头实现气动夹爪的气体介质从静态系统输入到动态旋转系统的过渡连接。
19.进一步的,所述移液器通过夹紧块设置在所述移液器安装板上。
20.采用上述进一步方案的有益效果是,实现移液器的安装定位,便于精准实现对移液器上的按钮的控制。
21.进一步的,所述驱动机构采用三轴模组,所述三轴模组包括x向移动模组、y向移动模组及z向移动模组。
22.采用上述进一步方案的有益效果是,通过三轴模组可实现各个抓取机构的横向动作、纵向动作及竖向升降动作,从而实现各个部件的夹取转移。
23.进一步的,还包括与所述x向移动模组平行的导轨,所述y向移动模组的一端支撑在所述x向移动模组上,另一端的底部设有与所述导轨相适配的滑块。
24.采用上述进一步方案的有益效果是,可对各抓取机构的动作进行导向,进一步确保各个抓取机构的移动的稳定性。
附图说明
25.图1为本实用新型的反应管抓取机构的结构示意图;
26.图2为图1中a处的局部放大图;
27.图3为本实用新型的钩爪的结构示意图;
28.图4为本实用新型的移液器抓取机构的结构示意图;
29.图5为本实用新型的真空泵混合器抓取机构的结构示意图;
30.图6为本实用新型的夹爪的结构示意图;
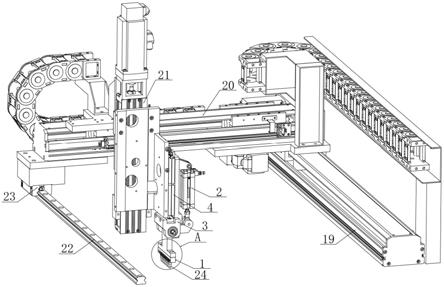
31.图7为本实用新型各抓取机构安装在一驱动机构的主视结构示意图;
32.图8为本实用新型各抓取机构安装在一驱动机构的后视结构示意图;
33.图9为本实用新型各抓取机构安装在一驱动机构的立体结构示意图;
34.图中,1、反应管钩爪;101、爪齿;102、定位槽口;2、翻转倾斜气缸;3、钩爪安装板;4、伸缩移栽气缸;5、移液器安装板;6、移液器;7、第一气缸;8、第二气缸;9、枪头控制按钮;10、体积调节按钮;11、夹爪;110、仿形槽;12、夹爪安装板;13、夹爪气缸;14、伺服电机;15、减速机;16、联轴器;17、气动旋转接头;18、夹紧块;19、x向移动模组;20、y向移动模组;21、z向移动模组;22、导轨;23、滑块;24、反应管;25、枪头;26、混合器。
具体实施方式
35.以下结合实例对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
36.如图1-图9所示,一种自动抓取装置,包括反应管抓取机构,所述反应管抓取机构包括反应管钩爪1及用于驱动反应管钩爪1移动的驱动机构,所述反应管钩爪1通过钩爪安装板3与所述驱动机构的驱动端连接,所述反应管钩爪1包括的多个并行设置的爪齿101,所述爪齿101之间设有与所述反应管的管径相适配的定位槽口102。所述钩爪与反应管相适配的。反应管采用联排反应管如八连管,爪齿数量与八连管相对应。
37.还包括下料辅助机构,所述下料辅助机构包括翻转倾斜气缸2,所述翻转倾斜气缸2设置在所述钩爪安装板3上,所述钩爪与所述钩爪安装板铰接,所述翻转倾斜气缸的活塞杆通过连接臂与所述钩爪连接。钩爪通过轴承与钩爪安装板连接,翻转倾斜气缸与连接臂的一端铰接,连接臂的另一端与钩爪固定连接,翻转倾斜气缸动作,能实现钩爪以轴承为转动支点倾斜翻转;翻转倾斜到一定角度后,反应管能通过自身重力从钩爪上脱出,从而将使用后的反应管丢弃到垃圾桶内进行回收。
38.所述钩爪安装板3与所述驱动机构的驱动端之间还设有伸缩移栽气缸4。通过伸缩移栽气缸4可调整钩爪的高度,避免不同抓取机构的夹爪25之间由于过于集中出现干扰。
39.还包括移液器抓取机构,所述移液器抓取机构包括移液器安装板5、设置在移液器安装板5上的移液器6、第一气缸7及第二气缸8,所述移液器安装板5与所述驱动机构的驱动
端连接,所述移液器6上设有枪头控制按钮9及体积调节按钮10,所述第一气缸7用于控制所述的枪头控制按钮9,所述第二气缸8用于控制所述的体积调节按钮10。第一气缸7作用于移液器6的枪头控制按钮9,实现移液器6自动安装枪头及枪头的自动剔除,第二气缸8作用于移液器6的体积调节按钮10,能实现移液器6的自动吸液及排液,多个独立控制的抓取机构及其对应的驱动系统,导致抓取装置结构复杂,一个驱动系统上可放置多个抓取机构,实现多个抓取机构在三维空间内的动作,节约抓取装置的安装空间。
40.还包括真空泵及混合器抓取机构,所述真空泵及混合器抓取机构包括用于抓取真空泵及混合器的气动夹爪11,所述气动夹爪11通过夹爪安装板12与所述驱动机构的驱动端连接,所述气动夹爪11包括一对夹爪11及用于驱动一对夹爪11开合的夹爪气缸13,所述夹爪气缸13设置在所述夹爪安装板12上。在该驱动机构上还有用于夹持其它部件的抓取机构,具体是可以抓取真空泵、混合器,通过气动夹爪11实现真空泵、混合器的抓取及转移,气动夹爪11抓取真空泵或混合器,然后在驱动机构的作用下可移至要求转移的位置。通过一个驱动机构实现多个抓取机构的驱动,充分利用设备的安装空间。
41.所述夹爪安装板12通过伺服电机14、减速机15与所述驱动机构的驱动端连接,一对所述夹爪11闭合时其一侧形成与所述混合器的外轮廓相适配的仿形槽110。现有的混合器拧松或拧紧完全采用人工操作,一方面工人劳动强度大,受人为因素影响比较大,往往拧紧力矩难以满足技术要求,为了满足自动化的要求,故增加了混合器自动拧紧或拧松的结构,当混合器需要拧开时,夹爪11闭合夹紧混合器,利用与混合器轮廓相适配的仿形槽110,在伺服电机14的作用下可以转动可轻松的打开混合器,便于从混合器取液。伺服电机14能准确控制旋转圈数;与驱动机构的z向控制的上下运动,实现旋转运动和上下运动同时动作;通过旋转速度和上下运动不同的速度匹配,满足混合器螺距的螺旋运动,实现混合器的开关,一夹爪既可以用来转移真空泵,还可以用来转移混合器及实现混合器拧开及拧紧操作,结构简单紧凑,合理布局,充分利用箱体内的空间。
42.所述伺服电机14通过气动旋转接头17与所述夹爪安装板12连接。伺服电机14通过安装板与驱动机构的驱动端连接,气动旋转接头17可固定在安装板上,其通过联轴器16与伺服电机14的输出轴连接,气动夹爪11安装在气动旋转接头17旋转端,通过气动旋转接头17实现气动夹爪11的气体介质从静态系统输入到动态旋转系统的过渡连接。
43.所述移液器6通过夹紧块18设置在所述移液器安装板5上。实现移液器6的安装定位,便于精准实现对移液器6上的按钮的控制。
44.所述驱动机构采用三轴模组,所述三轴模组包括x向移动模组19、y向移动模组20及z向移动模组21。通过三轴模组可实现各个抓取机构的横向动作、纵向动作及竖向升降动作,从而实现各个部件的夹取转移。
45.还包括与所述x向移动模组19平行的导轨22,所述y向移动模组20的一端支撑在所述x向移动模组19上,另一端的底部设有与所述导轨22相适配的滑块23。可对各抓取机构的动作进行导向,进一步确保各个抓取机构的移动的稳定性。
46.爪齿插入到反应管24的管体之间,通过爪齿与反应管之间的插装配合实现反应管的抓取,然后可通过三轴模组实现反应管在三维空间内的自动化的转移,转移过程钩爪与反应管定位稳定,反应管的脱离则可通过反应管到位后的反应管的管体插入到定位槽,钩爪则反向抽出即可,当需要将使用后的反应管丢入回收箱时,则可通过翻转倾斜气缸伸长,
驱动钩爪翻转,反应管则脱离爪齿从定位槽口脱落入回收箱内。当需要抓取真空泵时,气动夹爪夹取真空泵,然后在三轴模组的作用下可在三维空间内转移,直到到达真空泵要求位置,当需要抓取混合器则利用混合器仿形槽抓取混合器26,并实现混合器的转移,需要打开混合器时,则可通过伺服电机转动配合z向的动作打开混合器,以便于利用移液器吸取混合器内的液体并将液体转移到要求位置如反应管内,具体移液器抓手取枪头,并移至开启的混合器通过加液及排液气缸吸取混合器内的液体,然后将吸取的液体移至并排放到开盖的八连管,八连管一共是八个管,需要取八次,为了保证每次取液不受其它影响,故每次都需要先取枪头25,然后取液排液,然后通过移液器自动控制装置将枪头丢至耗材回收箱内。利用一驱动机构实现各个抓取机构在三维空间内的抓取、转移及放置,自动化的抓取及转移,驱动结构简单,能有效利用设备内部空间满足检测设备的要求。
47.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。