1.本实用新型是关于一种机械装置,特别是关于一种送料装置。
背景技术:
2.键帽、剪刀脚是键盘的组成部分,而且键帽、剪刀脚均是体积很小的零部件,在对键帽和剪刀脚进行组装时,需要对键帽和剪刀脚进行送料,现有技术中,由于键帽和剪刀脚太过小巧,使得还是只能靠人工去进行送料,效率很低,且还严重影响后续装配的效率。
3.公开于该背景技术部分的信息仅仅旨在增加对本实用新型的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
4.本实用新型的目的在于提供一种送料装置及输送装置,其能够提高键帽和剪刀脚的送料效率。
5.为实现上述目的,本实用新型提供了一种送料装置,包括工作台、第一支架、输送机构、取料机构、第一驱动机构和第二驱动机构;
6.所述第一支架安装于工作台上。所述输送机构安装于工作台上,用于输送物料。所述取料机构位于输送机构的上方,用于取料。所述第一驱动机构与取料机构配合安装,用于驱动取料机构沿第一方向进行直线往复运动。所述第二驱动机构安装于第一支架上,所述第一驱动机构通过第二支架与第二驱动机构配合安装,所述第二驱动机构用于驱动取料机构沿第二方向进行直线往复运动。
7.在一个或多个实施方式中,所述取料机构包括与第一驱动机构配合安装的第一安装架、转动安装于第一安装架上的若干取料组件、安装于第一安装架上的第一驱动电机以及安装于取料组件和第一驱动电机之间的传动组件,所述第一驱动电机通过传动组件驱动取料组件转动。
8.在一个或多个实施方式中,所述取料组件包括取料气缸、与取料气缸配合安装的取料头,所述取料气缸用于驱动取料头沿第三方向进行直线往复运动并通过取料头取料。
9.在一个或多个实施方式中,所述传动组件包括安装于取料气缸上的第一驱动轮、与第一驱动电机配合安装的第二驱动轮以及安装于第一驱动轮和第二驱动轮之间的第一传动带。
10.在一个或多个实施方式中,所述取料头为夹爪或吸盘。
11.在一个或多个实施方式中,所述取料组件的数量为不少于两个的偶数个,两个所述取料组件为一组,所述第一驱动电机的数量对应取料组件的个数,所述传动组件的数量对应取料组件的数量,每个所述第一驱动电机通过两个传动组件对应驱动一组取料组件同时转动。
12.在一个或多个实施方式中,所述取料组件设置有四个,所述第一驱动电机设置有
两个,所述传动组件设置有两个,每个所述第一驱动电机通过两个传动组件对应同时驱动两个取料组件转动。
13.在一个或多个实施方式中,所述第一驱动机构包括安装于第二支架上的第二驱动电机、与第二驱动电机配合安装的第三驱动轮、转动安装于第二支架上的第一丝杆、与第一丝杆固定安装的第四驱动轮、安装于第三驱动轮和第四驱动轮之间的第二传动带、安装于第二支架上的第一导轨、安装于第一导轨上的第一滑块以及安装于第一丝杆上的第一螺母,所述第一滑块和第一螺母与取料组件固定安装,所述第二驱动电机驱动第一丝杆转动从而带动取料组件沿着第一导轨进行往复运动。
14.在一个或多个实施方式中,所述第二驱动机构包括与第一支架固定安装的第三驱动电机、与第三驱动电机配合安装的第五驱动轮、转动安装于第一支架上的第二丝杆、与第二丝杆固定安装的第六驱动轮、安装于第五驱动轮和第六驱动轮之间的第三传动带、安装于第一支架上的第二导轨、安装于第二导轨上的第二滑块以及安装于第二丝杆上的第二螺母,所述第二滑块和第二螺母与第二支架固定安装,所述第三驱动电机驱动第二丝杆转动从而带动第二支架沿着第二导轨进行往复运动。
15.在一个或多个实施方式中,所述输送机构为振动盘机构。
16.与现有技术相比,根据本实用新型的输送机构进行剪刀脚或键帽的有序输送,通过第一驱动机构和第二驱动机构驱动取料机构移动,实现取料机构的精准定位,使得取料机构能够准确夹取或吸取剪刀脚或键帽,从而保证后续装配的有序进行,自动化程度高,效率高。
附图说明
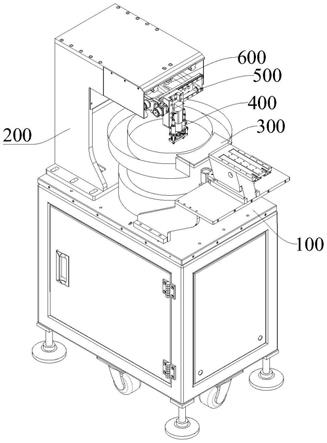
17.图1是根据本实用新型一实施方式的送料装置的结构示意图。
18.图2是根据本实用新型一实施方式的取料机构的结构示意图。
19.图3是根据本实用新型一实施方式的取料机构的另一角度的结构示意图。
20.图4是根据本实用新型一实施方式的第一驱动机构的结构示意图。
21.图5是根据本实用新型一实施方式的第二驱动机构的结构示意图。
具体实施方式
22.下面结合附图,对本实用新型的具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
23.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
24.如图1所示,根据本实用新型一实施方式的一种送料装置,包括工作台100、第一支架200、输送机构300、取料机构400、第一驱动机构500、第二驱动机构600和第二支架700。
25.其中,第一支架200安装于工作台100上;输送机构300装于工作台100上,输送机构300用于输送剪刀脚或键帽,输送机构300包括振动盘和直线振动器等;取料机构400位于输送机构300的上方,用于剪刀脚或键帽的收取和放下;第一驱动机构500与取料机构400配合安装,第一驱动机构500用于驱动取料机构400沿第一方向进行直线往复运动;第二驱动机
构600安装于第一支架200上,第一驱动机构500通过第二支架700与第二驱动机构600配合安装,第二驱动机构600用于驱动取料机构400沿第二方向进行直线往复运动,第一方向为x轴方向,第二方向为y轴方向。
26.如图2所示,取料机构400包括与第一驱动机构500配合安装的第一安装架410、转动安装于第一安装架410上的若干取料组件420、安装于第一安装架410上的第一驱动电机430以及安装于取料组件420和第一驱动电机430之间的传动组件440,第一驱动电机430通过传动组件440驱动取料组件420转动,取料组件420通过轴承与第一安装架410配合安装。
27.如图3所示,取料组件420包括取料气缸421、与取料气缸421配合安装的取料头422,取料气缸421本体通过轴承与第一安装架410配合安装,取料气缸421用于驱动取料头422沿第三方向进行直线往复运动并通过取料头422取料,第三方向为z轴方向,第一驱动电机430也沿第三方向固定于第一安装架410上。
28.在本实施方式中,取料头422为夹爪,在其他实施方式中,取料头422也可以为吸盘。
29.如图3所示,传动组件440包括安装于取料气缸421上的第一驱动轮441、与第一驱动电机430配合安装的第二驱动轮442以及安装于第一驱动轮441和第二驱动轮442之间的第一传动带(图中未示出),通过第一驱动电机430驱动第二驱动轮442转动从而带动第一驱动轮441转动,进而带动取料气缸421转动。
30.在其他实施方式中,取料组件420可以为一个等单数个,通过一个第一驱动电机430驱动该取料组件420转动。
31.在其他各个实施方式中,取料组件420的数量也可以为两个、四个、六个等不少于两个的偶数个,将两个取料组件420设置为一组,第一驱动电机430的数量对应取料组件420的组数,即取料组件420有多少组,则第一驱动电机430有多少个,传动组件440的数量对应取料组件420的个数,即取料组件420有多少个,则传动组件440有多少个,随着传动组件440的增加,则相应的第一驱动电机430的驱动轴上安装的第二驱动轮442也随之增加,每个第一驱动电机430通过两个传动组件440对应驱动一组取料组件420同时转动。
32.在本实施方式中,取料组件420设置有四个,第一驱动电机430设置有两个,每个第一驱动电机430的两侧分别设置有取料组件420,传动组件440设置有两个,对应的第一驱动电机430的驱动轴上安装有两个第二驱动轮442,每个第一驱动电机430通过两个传动组件440对应同时驱动两个取料组件420转动从而改变取料头422的角度。
33.如图4所示,第一驱动机构500包括安装于第二支架700上的第二驱动电机510、与第二驱动电机510配合安装的第三驱动轮520、转动安装于第二支架700上的第一丝杆530、与第一丝杆530固定安装的第四驱动轮540、安装于第三驱动轮520和第四驱动轮540之间的第二传动带550、安装于第二支架700上的第一导轨560、安装于第一导轨560上的第一滑块570以及安装于第一丝杆530上的第一螺母580,第一丝杆530通过轴承与第二支架700配合安装,第四驱动轮540安装于第一丝杆530的端部,第一导轨560平行设置有两根,第一滑块570对应设置有两块,第一滑块570和第一螺母580与取料组件420固定安装。
34.第二驱动电机510驱动第三驱动轮520转动,第三驱动轮520转动并通过第二传动带550带动第四驱动轮540转动,第四驱动轮540转动带动第一丝杆530转动,第一丝杆530的转动配合第一螺母580和第一滑块570最终带动取料组件420沿着第一导轨560进行往复运
动,即取料组件420沿第一方向进行往复运动。
35.如图5所示,第二驱动机构600包括与第一支架200固定安装的第三驱动电机610、与第三驱动电机610配合安装的第五驱动轮620、转动安装于第一支架200上的第二丝杆、与第二丝杆固定安装的第六驱动轮630、安装于第五驱动轮620和第六驱动轮630之间的第三传动带640、安装于第一支架200上的第二导轨650、安装于第二导轨650上的第二滑块660以及安装于第二丝杆上的第二螺母。
36.第二丝杆通过轴承与第一支架200配合安装,第二导轨650平行设置有两根,第二滑块660和第二螺母与第二支架700固定安装。
37.第三驱动电机610驱动第五驱动轮620转动,第五驱动轮620转动并通过第三传动带640带动第六驱动轮630转动,第六驱动轮630转动带动第二丝杆转动,第二丝杆的转动配合第二滑块660和第二螺母最终带动第二支架700沿着第二导轨650进行往复运动,第二支架700移动则带动取料组件420移动,即取料组件420沿第二方向进行往复运动。
38.输送机构300不断输送剪刀脚或键帽,第一驱动机构500驱动取料机构400沿第一方向进行直线往复运动,第二驱动机构600驱动取料机构400沿第二方向进行直线往复运动,使得取料组件420对准剪刀脚或键帽,第一驱动电机430驱动取料组件420转动从而转动取料头422的角度,使得取料头422方便夹取后吸取剪刀脚或键帽,取料气缸421驱动取料头422下降夹取或者吸取剪刀脚或键帽,夹取或者吸取剪刀脚或键帽后,取料气缸421驱动取料头422上升,再通过第一驱动机构500和第二驱动机构600驱动取料组件420移动至下一工位,从而实现剪刀脚或键帽的上料。
39.前述对本实用新型的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本实用新型限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本实用新型的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本实用新型的各种不同的示例性实施方案以及各种不同的选择和改变。本实用新型的范围意在由权利要求书及其等同形式所限定。