1.本实用新型涉及印刷品生产设备技术领域,具体涉及一种自动码垛装置的控制系统。
背景技术:
2.生产印刷完毕的包装纸壳一般为片状,以便于仓储和运输,使用时将片状的包装纸壳加工成方形等各种形状的包装盒,加工方式是在包装生产线上对片状包装材料的相应部位进行折叠、涂胶,再通过机械成形、粘接而成;如条形烟壳、牙膏包装壳等。
3.片状包装纸壳在进行加工后需要进行码垛打包,现有印刷生产企业对生产完的片状包装纸壳收纸码垛,一般采用人工码垛,其需要耗费大量的时间和人力,且每垛的片状包装纸壳数量经常容易出现错误,或多或少都影响企业成本,采购方进行抽检时,少了则计入不合格,影响合同履行和企业信誉,而如果多了的多出部分并不会计入供货量,其会无形增加生产企业成本;而且遇到纸壳偏软,偏涩时,人工码垛(每垛大概100-200张)整理对齐较为困难,会降低生产设备的机速,牺牲生产效率,或者投入更多人力(具企业统计,企业目前双工位贴窗机收料码垛均靠人工不断的进行码垛整理对齐,机速达到20000张/小时,收料需投入2~3人,人工成本高、效率低,劳动强度大),且由于产品刚经过贴窗(透明胶片贴在纸壳镂空处),粘胶位尚不牢固,人工码垛整理对齐,容易造成透明胶片移位产生废品;虽然市面上出现了一些纸壳、纸板码垛设备,但在企业试图引入、使用时发现壳码垛设备通用性较差,生产的片状包装纸壳纸形、尺寸改变后,设备需要进行很长时间停机调整,通用性较差,设备无法对码垛的片状包装纸壳数量进行精准控制,无法控制每垛的纸壳张数;同时还会发生码垛整理对齐时,容易挤压片状包装纸壳垛,造成刚经过贴窗(透明胶片贴在纸壳镂空处)的透明胶片移位产生废品等问题,针对现有技术的缺陷,如何实现设备中电控系统的控制,是克服现有技术实现自动码垛的重大难题。
技术实现要素:
4.针对上述问题,本实用新型提供一种自动码垛装置的控制系统,能够实现设备机械机构结合软性计数的片状包装纸壳码垛数量控制。
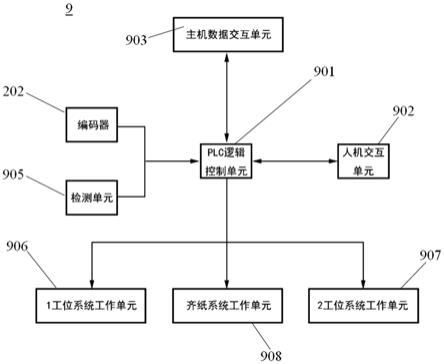
5.本实用新型的具体技术方案是,一种自动码垛装置的控制系统,包括安装在电控箱中的plc逻辑控制单元,人机交互单元、主机数据交互单元、编码器、检测单元、1工位系统工作单元、2工位系统工作单元、齐纸系统工作单元;所述plc逻辑控制单元通过主机数据交互单元均与人机交互单元、编码器、检测单元、1工位系统工作单元、2工位系统工作单元、齐纸系统工作单元联接。
6.所述编码器,用于采集输送带数据。
7.所述人机交互单元,用于将plc逻辑控制单元的数据输出或输入数据。
8.所述检测单元,用于采集接纸工作平台数据和纸壳计数信号。
9.所述plc逻辑控制单元接收所述人机交互单元、编码器和检测单元的数据,并逻辑
运算后,控制所述1工位系统工作单元、2工位系统工作单元、齐纸系统工作单元工作。
10.所述plc逻辑控制单元包括plc逻辑控制器。
11.进一步,优选的是,所述编码器位于输送带上,并与输送带的带面相接触。
12.进一步,优选的是,所述人机交互单元包括触摸屏。
13.进一步,优选的是,所述检测单元包括用采集纸壳计数信号的纸壳计数器。
14.进一步,优选的是,所述检测单元还包括设置在机架内检测接纸工作平台升降的平台位置检测电眼。
15.进一步,优选的是,所述平台位置检测电眼包括位于上侧的平台上限位检测电眼和位于下侧的平台下限位检测电眼。
16.进一步,优选的是,所述检测单元还包括检测接纸工作平台纸垛高度的纸壳高度检测电眼。
17.进一步,优选的是,所述1工位系统工作单元包括控制1工位接纸工作平台升降的1工位接纸工作平台传动电机,1工位的挡纸气缸,1工位的推送拨叉气缸。
18.进一步,优选的是,所述2工位系统工作单元包括控制2工位接纸工作平台升降的2工位接纸工作平台传动电机,2工位的挡纸气缸,2工位的推送拨叉气缸。
19.进一步,优选的是,所述齐纸系统工作单元包括控制齐纸机构运动的齐纸电机。
20.本实用新型的有益效果是:通过建立码垛自动计数模型,电控实现在完成码垛时对片状包装纸壳精准计数,且能实现单工位和双工位分别独立控制运行,及分别不同数量码垛,另外,触摸屏还可显示机速、产量及报警信息,实时跟踪设备状态。
21.采用电气化控制系统,实现设备机械机构结合软性计数的片状包装纸壳码垛数量控制,设备整机自动化程度高,可以完全替代人工码垛,设备通用性好。
附图说明
22.图1为本实用新型一种自动码垛装置的控制系统逻辑图。
23.图2为本实用新型一种自动码垛装置的控制系统工作步骤图。
24.图3为本实用新型一种自动码垛装置的控制系统中编码器和纸壳计数器安装位置。
25.图4为本实用新型一种自动码垛装置的控制系统中1工位系统工作单元和2工位系统工作单元位控制自动码垛装置工作的主视图。
26.图5为本实用新型一种自动码垛装置的控制系统中1工位系统工作单元和2工位系统工作单元位、齐纸系统工作单元控制自动码垛装置工作的俯视图。
27.图6为本实用新型一种自动码垛装置的控制系统中1工位系统工作单元和2工位系统工作单元位控制自动码垛装置工作左视图内部结算示意图一。
28.图7为本实用新型一种自动码垛装置的控制系统中1工位系统工作单元和2工位系统工作单元位控制自动码垛装置工作左视图内部结算示意图二。
29.图8为图6中a处的局部放大图。
30.图9为本实用新型一种自动码垛装置的控制系统中齐纸电机控制自动码垛装置工作左视图内部结算示意图。
31.图10为本实用新型一种自动码垛装置的控制系统的电路图一,其中主要示出了1
工位接纸工作平台传动电机和2工位接纸工作平台传动电机联接。
32.图11为本实用新型一种自动码垛装置的控制系统的电路图二,其中主要示出了推送拨叉气缸、挡纸气缸和齐纸电机联接。
33.图12为本实用新型一种自动码垛装置的控制系统的电路图三,其中主要示出了编码器联接。
34.图13为本实用新型一种自动码垛装置的控制系统的电路图四,其中主要示出了纸壳计数器与plc逻辑控制单元联接。
35.图14为本实用新型一种自动码垛装置的控制系统的电路图五,其中主要示出了平台上下限位检测电眼与plc逻辑控制单元联接。
36.图15为本实用新型一种自动码垛装置的控制系统的电路图六,主要示出了工作单元与plc逻辑控制单元联接。
37.上图中:1a-1工位,2b-2工位,1-机架,101-侧壁,2-输送带,201-纸壳计数器,202-编码器,3-齐纸机构,4-接纸工作平台,5-出料工作台,6-推送拨叉,7-挡纸插板,8-传动系统,9-电控箱,91-触摸屏;
38.401-1工位接纸工作平台,402-2工位接纸工作平台,408-平台位置检测电眼,4081-平台上限位检测电眼,4082-平台下限位检测电眼,409-纸壳高度检测电眼;
39.601-推送拨叉气缸;702-挡纸气缸;
40.801-1工位接纸工作平台传动电机;802-2工位接纸工作平台传动电机;803-齐纸电机;
41.901-plc逻辑控制单元,902-人机交互单元,903-主机数据交互单元,905-检测单元,906-1工位系统工作单元,907-2工位系统工作单元,908-齐纸系统工作单元。
具体实施方式
42.为了使本实用新型所解决的技术问题、技术方案更加清楚明白,以下结合附图及实施例,对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于解释本实用新型,并不用于限定本实用新型。
43.在本实用新型的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
44.实施例1:
45.如图1至2和图10至图15所示,本实用新一种自动码垛装置的控制系统的,包括安装在电控箱中的plc逻辑控制单元901,人机交互单元902、主机数据交互单元903、编码器202、检测单元905、1工位系统工作单元906、2工位系统工作单元907、齐纸系统工作单元908。
46.plc逻辑控制单元901主要包括plc逻辑控制器,其实现各种数据的逻辑运算、顺序控制、定时、计数、算术操作等控制指令,并通过数字或模拟式输入/输出对设备进行控制,其设置在电控箱9内,该程序控制逻辑结合和工作顺序,请参考图1和图2。
47.人机交互单元902则包括安装在机架1上侧的触摸屏,实现设备运行监控、数据输入、数据输出等功能,当然还可以包括报警灯、报警发声器等人机交互设备。
48.设置在输送带2上的编码器202,编码器202位于输送带2的下侧,编码器202的转动头需要与输送带2的皮带接触,以实现定量输出模型公式所用数据的采集。
49.检测单元905包括对接纸工作平台4升降控制进行检测控制的设置在机架1内升降同步带一侧的平台位置检测电眼408,平台位置检测电眼408包括位于上侧的平台上限位检测电眼4081和位于下侧的平台下限位检测电眼4082。
50.以及安装在后齐纸板上用于控制接纸工作平台4随着纸垛高度的提升,逐步下降接纸工作平台4使之能够承接从输送带2上输入的片状包装纸壳的纸壳高度检测电眼409,当然的1工位1a和2工位2b各需安装一个。
51.还包采集纸壳计数信号的纸壳计数器201。
52.1工位系统工作单元906包括控制1工位接纸工作平台401升降的1工位接纸工作平台传动电机801,1工位1a的挡纸气缸702,1工位1a的推送拨叉气缸601。
53.2工位系统工作单元907包括控制2工位接纸工作平台402升降的2工位接纸工作平台传动电机802,2工位2b的挡纸气缸702,2工位2b的推送拨叉气缸601。
54.齐纸系统工作单元908则包括控制齐纸机构3,即左齐纸板、右齐纸板和后齐纸板运动的齐纸电机803。
55.主机数据交互单元903包括数据线,实现主机数据交换,计数采集、预警响铃、报警停机等功能。
56.即人机交互单元902、编码器202、检测单元905、1工位系统工作单元906、2工位系统工作单元907、齐纸系统工作单元908通过主机数据交互单元903与plc逻辑控制单元901联接。
57.如图3至图9所示,运输片状包装纸壳的输送带2,输送带2多为上游设备配套输出带,片状包装纸壳在贴窗工序,经过贴窗(透明胶片贴在纸壳镂空处)后,逐张掉落在输送带2上呈鱼鳞状叠放于输送带2上,经输送带2送至末端,在输送带2上设置有编码器202,编码器202位于输送带2的下侧,与输送带2接触。
58.还包括纸壳计数器201,纸壳计数器201位于输送带2对接的上游设备上,一般上游设备均设置有纸壳计数信号器材,如果上游设备没有设置有纸壳计数信号器材,则可以在其出料口或出料通电增设纸壳计数器201,纸壳计数器201可以采用计数电眼,其为现有成熟技术器材。
59.对应1工位1a和2工位2b,纸壳计数器201应该设置2组,分别采集1工位1a和2工位2b的纸壳计数信号。
60.机架1内输送带2出料口处设置有用于承接片状包装纸壳的接纸工作平台4,优选的接纸工作平台4左右对称的设置有2个,即1工位接纸工作平台401和2工位接纸工作平台402,形成1工位1a和2工位2b,请参考图4至图7。
61.接纸工作平台4通过安装板安装在升降同步带上,即左右侧壁101上分别设置有同步带轮,1工位接纸工作平台传动电机801和2工位接纸工作平台传动电机802转动输送轴端与同步带轮连接,通过2台接纸工作平台传动电机的正转及反转分别带动1工位升降同步带和2工位升降同步带上下运动,从而分别实现1工位接纸工作平台401和2工位接纸工作平台
402上下升降运动,本实施采用了同步轮转动,带动同步带从而实现接纸工作平台4上下升降运动,当然也可以采用链轮转动带动链条从而实现接纸工作平台4上下升降运动,也可以采用丝杆转动带动丝杆滑块从而实现接纸工作平台4上下升降运动,其为等同替换。
62.如图4至图7所示,还包括对接纸工作平台4上纸壳垛进行一次或多次轻拍齐纸的齐纸机构3。
63.齐纸机构3包括接纸工作平台4两侧设置有能够对合运动的左齐纸板和右齐纸板。
64.左齐纸板和右齐纸板安装在齐纸推杆ⅰ和齐纸推杆ⅱ上,通过齐纸推杆ⅰ和齐纸推杆ⅱ带动实现相向或背向运动,从而实现左齐纸板和右齐纸板对合齐纸,其类似左右两只手一起轻拍对齐纸垛。
65.接纸工作平台4靠近输送带2一侧设置有前齐纸板,同样,对应1工位接纸工作平台401和2工位接纸工作平台402设置有1工位前齐纸板和2工位前齐纸板(图中未标出),前齐纸板紧贴输送带,其与输送带相切。
66.对应前齐纸板在接纸工作平台4远离输送带2一侧设置有后齐纸板,后齐纸板能够前后运动从而实现对合齐纸;同样,对应1工位接纸工作平台401和2工位接纸工作平台402设置有1工位后齐纸板和2工位后齐纸板(图中未标出)。
67.如图4至图7所示,后齐纸推杆左右对称各设置有1根,后齐纸推杆滑动插装在后齐纸安装滑座中,后齐纸安装滑座固定安装机架1的侧壁101上,后齐纸安装滑座设置有2个,分别在设备前后侧。
68.后齐纸板成“l”型结构,后齐纸板安装在后齐纸横梁上,而后齐纸横梁两端则连接有后齐纸连接块上,后齐纸推杆远离输送带端安装有后齐纸顶板,后齐纸推杆上套装有能够顶压后齐纸顶板先后运动的后齐纸弹簧,后齐纸弹簧一端顶压后齐纸安装滑座,另一端顶压后齐纸顶板,当然也可以采用独立的挡板替代后齐纸安装滑座来顶压后齐纸弹簧,其为等同替换。
69.后齐纸推杆还安装有后齐纸滚轮,后齐纸推动凸轮与后齐纸滚轮滚动接触,并能够推动齐纸滚轮,通过后齐纸弹簧给予后齐纸推杆一个向右的弹力,保持后齐纸滚轮与后齐纸推动凸轮接触,而随着后齐纸推动凸轮转动,就能实现一个凸轮运动,从而实现后齐纸板前后运动,从而实现前后轻拍对合齐纸。
70.由上述可知齐纸机构3包括固定的前齐纸板,左齐纸板和右齐纸板对接纸工作平台4纸壳进行左右方向拍打整理,后齐纸板和前齐纸板对接纸工作平台4纸壳进行前后方向拍打整理,三个方向的拍打动作实现了对输送带2进入对接纸工作平台4的鱼鳞式叠放纸壳的整理对齐。
71.如图9所示,还包括传动系统8,传动系统8包括分别位于左右侧壁101外侧的1工位接纸工作平台传动电机801和2工位接纸工作平台传动电机802。
72.还包括在本实施例中设置在左侧壁101外侧,防护罩壳内的齐纸电机803,齐纸电机803的转动端安装有链轮,通过链轮和链条带动位于其上方的主动杆转动,主动杆两端通过设置的传动链机构(包括链轮、链条、轴承、轴承支座)分别带齐纸推杆ⅰ和齐纸推杆ⅱ对应的动转动盘转动。
73.齐纸推杆ⅰ和齐纸推杆ⅱ的左端转动连接有摇杆,摇杆另外一端与转动盘偏心转动连接,从而构成摆杆推杆机构,齐纸推杆ⅰ和齐纸推杆ⅱ左右往复运动,实现左齐纸板和
右齐纸板对纸壳的拍打动作,完成对纸壳整理对齐的步骤,通过转动盘转速速度、速率能够实现拍纸板动作的频率可调、可控。
74.主动杆最右端还安装有传动轮,传动轮上安装有传动圆带,通过传动圆带传输动力,带动传动杆转动,而后齐纸推动凸轮则安装在传动杆上,通过传动杆转动带动后齐纸推动凸轮转动顶压后齐纸滚轮,带动后齐纸推前后往复运动。
75.综上所述,通过齐纸电机803带动转动盘及后齐纸推动凸轮从而实现了单张纸壳进行整理,即接纸工作平台4每进一张片状包装纸壳后,左齐纸板、右齐纸板和后齐纸板对纸壳垛进行一次或多次轻拍齐纸,采用单张纸壳进行整理的原理,因此,遇到纸壳偏软、偏涩时也能很好的完成齐纸动作,单张纸壳即可实现多次拍打整理对齐,由于单张纸壳重量轻,压力小,因此,单张纸壳整理时不会造成透明胶片的移位,有效降低收料废品率的产生。
76.如图4至图7所示,当片状包装纸壳垛的纸壳数量达到设置数量时,接纸工作平台4会下降,1工位接纸工作平台401和2工位接纸工作平台402分别采用了独立的动力源的传动机构,因此可以实现1工位1a和2工位2b独立运行,可以实现单工位运营,也可以实现双工位一起分别独立运行。
77.机架1底板上远离输送带2一侧安装有能够与下降后的接纸工作平台4对接的出料工作台5,出料工作台5当然也对应1工位接纸工作平台401和2工位接纸工作平台402包括有1工位出料工作台和2工位出料工作台(图中未标出),其上表面设置有出料滚轮,结构与接纸工作平台4相同,可以直接采用流利条,其上的硅胶轮,可降低产品在出料过程中的摩擦力,及防止产品擦伤,使产品顺利输出,设计结构简单,实用。
78.出料工作台5靠近接纸工作平台4一侧安装有能够将接纸工作平台4上的片状包装纸壳垛推送到出料工作台5上的推送拨叉6;推送拨叉气缸601安装在出料工作台5下方,推送拨叉气缸601的伸缩杆端与推送拨叉6连接,通过推送拨叉气缸601伸缩实现推送拨叉6向外推送纸垛,即将接纸工作平台4上的片状包装纸壳垛推送到出料工作台5上。
79.如图6、图8所示,还包括挡纸插板7,输送带2出料口上侧设置有在接纸工作平台4下降时,能够向下运动至输送带2表面,起到临时阻挡片状包装纸壳的挡纸插板7,挡纸插板7与挡纸气缸702伸缩端连接,通过挡纸气缸702倾斜向下运动至输送带2表面,其与输送带2上表面相接触,优选的挡纸插板7与输送带2的接触点在输送带2上表面与弧形带面相切点或在弧形带面前侧。
80.当然为了对应1工位1a和2工位2b,挡纸插板7设置有2组4对,分别独立完成1工位1a和2工位2b挡纸。
81.挡纸气缸702通过挡纸安装架安装在机架的两侧壁101上,当然为了保证挡纸插板7平稳,可以通过在挡纸安装架上加装带导向滑槽的导向板,挡纸插板7两端设置有导向圆柱,导向圆柱能够在导向滑槽内滑动,进一步,在导向圆柱外侧还能够加装轴承,在导向板外侧加装滑轨条,轴承能够在滑轨条上滚动,其能够保证挡纸插板7运动的平稳。
82.实施例2:
83.本实用新型一种自动码垛装置的控制系统控制设备运动的逻辑步骤,请参阅图2、图3,其运算模型包括如下步骤:
84.1)测量模型参数:测量输送带2上片状包装纸壳入料位置至挡纸插板7接触输送带2点的长度为;测量片状包装纸壳长度为。
85.2)设定码垛塑数量:通过人机交互单元902向plc逻辑控制单元901分别输入设定1工位1a码垛数量和2工位2b码垛数量。
86.3)设备运行:设备开启,经过贴窗工艺后的片状包装纸壳,经过纸壳计数器201采集纸壳计数信号后,逐张掉落在输送带2上呈鱼鳞状叠放于输送带2上。
87.4)plc运行计算模型:当或到达设定值时,plc输入点开始记录编码器202脉冲数,plc逻辑控制单元901内运行提前构建的运算模型公式:。其中b为或设定值的最后一张片状包装纸壳到达挡纸插板7,编码器202所需滚动的脉冲数;a编码器转一周的脉冲数,根据所用编码器型号获得的已知定量,d为编码器滚轮直径,可实际测量获得的已知定量;通过上述公式可得b值,当编码器202到达b值时,即满足当b值满足条件后;plc逻辑控制单元901控制1工位1a或2工位2b的挡纸气缸702运行,挡纸插板7临时阻挡后续的片状包装纸壳。plc另一输入点开始记录编码器脉冲数,plc逻辑控制单元901内运行提前构建的运算模型公式:;其中c为挡纸插板7伸出阻挡后续的片状包装纸壳后,位于输送带2上设置数量的纸张全部进入到接纸工作平台4,编码器202所需滚动的脉冲数;当c满足条件后,plc逻辑控制单元901控制1工位接纸工作平台401或2工位接纸工作平台402下降。
88.5)推送出纸,1工位接纸工作平台401或2工位接纸工作平台402下降到位后,平台位置检测电眼408,反馈型号给plc逻辑控制单元901,其控制1工位系统工作单元906或2工位系统工作单元907中的推送拨叉气缸601带动推送拨叉6将片状包装纸壳垛推送到出料工作台5上。
89.6)复位运营:1工位接纸工作平台401或2工位接纸工作平台402快速上升复位后,挡纸插板7收起,片状包装纸进入1工位接纸工作平台401或2工位接纸工作平台402,完成一个周期的计数整理码垛,如此往复工作达到自动码垛的功能。
90.通过在plc内建立的模型计算公式程序实现软性计数的片状包装纸壳码垛数量控制,实现完成码垛的每堆纸壳数量可控、可调。
91.当码垛数量达到预设值后,挡纸气缸702带动挡纸插板7伸出,挡住后续纸壳,接纸工作平台4自动降至最低,待推送拨叉气缸601带动推送拨叉6将纸垛推出后,接纸工作平台4自动升到最高,挡纸插板7缩回允许进料口纸壳进入接纸工作平台4,如此往复运动,实现了全自动收料功能,通过建立码垛自动计数模型,结合电控实现在完成码垛时对片状包装纸壳精准计数,且能实现单工位和双工位分别独立控制运行,及分别不同数量码垛,另外,触摸屏还可显示输送带2速度、产量及报警信息,实时跟踪设备状态。
92.以上通过具体的和优选的实施例详细的描述了本实用新型,但本领域技术人员应该明白,本实用新型并不局限于以上所述实施例,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换等,均应包含在本实用新型的保护范围之内。