1.本实用新型涉及一种药物转运机器人的机械臂,属于机器人运输领域。
背景技术:
2.伴随着医药科技的进步,市面上针对各种病情的药物也越来越多。现在的社会中仍存在很多的传染性疾病,传染病的传播的途径是携带有该病毒的人,极容易让病毒释放到空气中,若有人吸入带有病毒的气体,就会引发感染。因为人与人之间的接触,导致了病毒的大面积传染。基于此,在传染病爆发的情况下,为降低传染风险,减少人群间的接触是必须要采取的一项举措。
技术实现要素:
3.本实用新型的目的是为了解决现有生活中存在的问题,而提出的一种药物转运机器人的机械臂。
4.本实用新型采用的技术方案是:一种药物转运机器人的机械臂,包括底部旋转盘1,底部旋转盘1与竖梁2连接,竖梁2上面连接一个滑台模组3,滑台模组3上方连接滑板4,滑板4上方与底板ⅰ6固定连接,连接座ⅰ9和导杆支座ⅰ17将汽缸ⅰ8固定在底板ⅰ6上,导杆支座ⅰ17 上端与直线轴承ⅰ7连接,导杆ⅰ10穿过直线轴承ⅰ7的一端与汽缸ⅰ8内的活塞杆ⅰ22 伸出导杆支座ⅰ17的一端均连接在末端执行器ⅰ15上,末端执行器ⅰ15与底板ⅱ14连接,连接座ⅱ11和导杆支座ⅱ21将汽缸ⅱ12固定在底板ⅱ14上,导杆支座ⅱ21与直线轴承ⅱ18连接,导杆ⅱ13穿过直线轴承ⅱ18的一端与汽缸ⅱ12内的活塞杆ⅱ23 伸出导杆支座ⅱ21的一端均连接在末端执行器ⅱ20上。
5.具体地,滑台模组3包括驱动电机、同步轮、同步带,驱动电机与同步轮连接,同步轮之间通过同步带连接,滑板4固定在同步带上。
6.优选地,所述滑板4与底板ⅰ6通过螺钉5固定连接。
7.优选地,所述末端执行器ⅰ15与底板ⅱ14通过固定螺钉连接。
8.本实用新型具有如下有益效果:
9.1.该药物转运机器人的机械臂, 竖梁上面连接一个滑动模组,在滑动模组的上侧通过滑板与底板ⅰ连接,可精确调节到需要到达的任何位置。
10.2.该药物转运机器人的机械臂, 导杆支座和直线轴承固定连接,导杆穿过直线轴承并与活塞杆固定于末端执行器,具有更好的导向性和加强效果。
11.3.该药物转运机器人的机械臂,通过一个滑动模组与两个汽缸结合,可以到快速准确的到达任意的空间位置,可以更好的提高工作效率。
附图说明
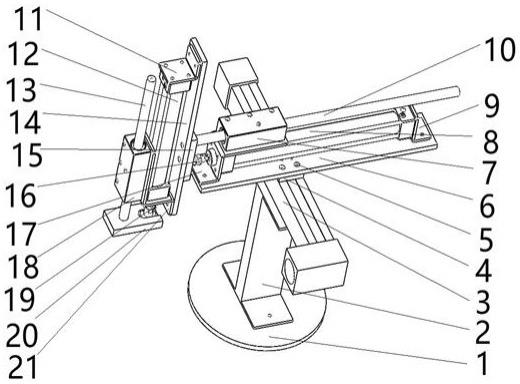
12.图1为本实用新型提出的一种药物转运机器人的机械臂的立体结构示意图;
13.图2为本实用新型提出的一种药物转运机器人的机械臂的正视结构示意图;
14.图3为本实用新型提出的一种药物转运机器人的机械臂的俯视结构示意图;
15.图4为本实用新型提出的一种药物转运机器人的机械臂的左视结构示意图;
16.图5为本实用新型提出的一种药物转运机器人的机械臂的活塞杆ⅰ的连接结构示意图;
17.图6为本实用新型提出的一种药物转运机器人的机械臂的活塞杆ⅱ的连接结构示意图。
18.图中各标号为:1、底部旋转盘;2、竖梁;3、滑动模组;4、滑板;5、螺钉;6、底板ⅰ;7、直线轴承ⅰ;8、汽缸ⅰ;9、连接座ⅰ;10、导杆ⅰ;11、连接座ⅱ;12、汽缸ⅱ;13、导杆ⅱ;14、底板ⅱ;15、末端执行器ⅰ;16、螺母ⅰ;17、导杆支座ⅰ;18、直线轴承ⅱ;19、螺母ⅱ;20、末端执行器ⅱ;21、导杆支座ⅱ;22、活塞ⅰ;23、活塞ⅱ。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.实施例1:参照图1-6,一种药物转运机器人的机械臂,包括底部旋转盘1,底部旋转盘1与竖梁2连接,竖梁2上面连接一个滑台模组3,滑台模组3上方连接滑板4,滑板4上方与底板ⅰ6固定连接,连接座ⅰ9和导杆支座ⅰ17将汽缸ⅰ8固定在底板ⅰ6上,导杆支座ⅰ17 上端与直线轴承ⅰ7连接,导杆ⅰ10穿过直线轴承ⅰ7的一端与汽缸ⅰ8内的活塞杆ⅰ22 伸出导杆支座ⅰ17的一端均连接在末端执行器ⅰ15上,末端执行器ⅰ15与底板ⅱ14连接,连接座ⅱ11和导杆支座ⅱ21将汽缸ⅱ12固定在底板ⅱ14上,导杆支座ⅱ21与直线轴承ⅱ18连接,导杆ⅱ13穿过直线轴承ⅱ18的一端与汽缸ⅱ12内的活塞杆ⅱ23 伸出导杆支座ⅱ21的一端均连接在末端执行器ⅱ20上。本实施例中,底板ⅰ6与底板ⅱ14的方向垂直,末端执行器ⅰ15的方向与末端执行器ⅱ20的方向垂直。
21.进一步地,滑台模组3包括驱动电机、同步轮、同步带,驱动电机与同步轮连接,同步轮之间通过同步带连接,滑板4固定在同步带上。
22.进一步地,所述滑板4与底板ⅰ6通过螺钉5固定连接,末端执行器ⅰ15与底板ⅱ14通过固定螺钉连接,结构简单,拆装方便。
23.本实用新型的工作原理是:该机械臂工作时,通过滑台模组3中的驱动电机带滑动动模组3上侧的滑板4运动,滑板4与底板ⅰ6固定连接,因此固定在底板ⅰ6上的汽缸ⅰ8跟着滑板4的运动前后运动。通过汽缸ⅰ8的运动伸缩带动导杆ⅰ10推动末端执行器ⅰ15的左右运动。汽缸ⅱ12的运动伸缩带动导杆ⅱ13推动末端执行器ⅱ20的上下运动。通过前后左右上下的运动伸缩使得机械臂可以到达一定空间内的任何一个位置,同时通过导杆的辅助作用使其更具有导向型和加强效果。
24.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均
应包含在本实用新型的保护范围之内。
技术特征:
1.一种药物转运机器人的机械臂,其特征在于:包括底部旋转盘(1),底部旋转盘(1)与竖梁(2)连接,竖梁(2)上面连接一个滑台模组(3),滑台模组(3)上方连接滑板(4),滑板(4)上方与底板ⅰ(6)固定连接,连接座ⅰ(9)和导杆支座ⅰ(17)将汽缸ⅰ(8)固定在底板ⅰ(6)上,导杆支座ⅰ(17) 上端与直线轴承ⅰ(7)连接,导杆ⅰ(10)穿过直线轴承ⅰ(7)的一端与汽缸ⅰ(8)内的活塞杆ⅰ(22) 伸出导杆支座ⅰ(17)的一端均连接在末端执行器ⅰ(15)上,末端执行器ⅰ(15)与底板ⅱ(14)连接,连接座ⅱ(11)和导杆支座ⅱ(21)将汽缸ⅱ(12)固定在底板ⅱ(14)上,导杆支座ⅱ(21)与直线轴承ⅱ(18)连接,导杆ⅱ(13)穿过直线轴承ⅱ(18)的一端与汽缸ⅱ(12)内的活塞杆ⅱ(23) 伸出导杆支座ⅱ(21)的一端均连接在末端执行器ⅱ(20)上。2.根据权利要求1所述的一种药物转运机器人的机械臂,其特征在于:滑台模组(3)包括驱动电机、同步轮、同步带,驱动电机与同步轮连接,同步轮之间通过同步带连接,滑板(4)固定在同步带上。3.根据权利要求1所述的一种药物转运机器人的机械臂,其特征在于:所述滑板(4)与底板ⅰ(6)通过螺钉(5)固定连接。4.根据权利要求1所述的一种药物转运机器人的机械臂,其特征在于:所述末端执行器ⅰ(15)与底板ⅱ(14)通过固定螺钉连接。
技术总结
本实用新型涉及一种药物转运机器人的机械臂,属于机器人运输领域。包括底部旋转盘,底部旋转盘与竖梁连接,竖梁上面连接一个滑台模组,滑台模组通过滑板与底板Ⅰ连接,连接座Ⅰ和导杆支座Ⅰ将汽缸Ⅰ固定在底板Ⅰ上,导杆支座Ⅰ与直线轴承Ⅰ连接,导杆Ⅰ穿过直线轴承Ⅰ的一端与汽缸Ⅰ内的活塞杆Ⅰ伸出导杆支座Ⅰ的一端均连接在末端执行器Ⅰ上,末端执行器Ⅰ与底板Ⅱ连接,连接座Ⅱ和导杆支座Ⅱ将汽缸Ⅱ固定在底板Ⅱ上,导杆支座Ⅱ与直线轴承Ⅱ连接,导杆Ⅱ穿过直线轴承Ⅱ的一端与汽缸Ⅱ内的活塞杆Ⅱ伸出导杆支座Ⅱ的一端均连接在末端执行器Ⅱ上。本实用新型的机械臂可以有效精准的到达指定位置,大大提高了工作效率,非常实用。非常实用。非常实用。
技术研发人员:袁锐波 李贇钊 丁彪 侯克金
受保护的技术使用者:昆明理工大学
技术研发日:2021.10.17
技术公布日:2022/2/15