1.本实用新型涉及一种桁架机器人用旋转料仓。
背景技术:
2.现代工业中,自动化生产越来越成为主流,以机器人为主体的柔性制造技术即机器人自动化设备更是大势所趋。机器人产业将是一个朝阳产业,未来的工业生产将逐渐演化成桁架机器人技术主导的工业生产,人类将从单调繁杂的体力劳动中解放出来,从事更加富有创造性的工作。
3.现有的桁架机器人通常用于衔接料仓与机床,通过机械臂抓取料仓特定位置的工件,并采用x、y、z三向坐标将工件快速传输至机床内的特定位置供机床加工。
4.现有桁架机器人存在的问题在于:现有的桁架机器人通常只将料仓内的工件抓取传输至机床内,而当机床加工完毕后,通常直接采用松开机床夹具的方式实现自由下料,因此,对于易磕碰的工件,往往发生磕碰而成为次品,大大降低了成品率。
5.因此,如何安全有效的实现工件的下料而提高成品率,成为本领域技术人员亟待解决的问题。
技术实现要素:
6.针对现有技术存在的不足,本实用新型的目的在于提供一种在料仓上设置上料工位以及下料工位使得与桁架机器人装配后而使得桁架机器人的机械臂从料仓进行工件的抓取,并将加工完成后将工件传输回来,而通过上料顶杆与下料顶杆实现工件的抓取位置与放回位置均为特定的位置,从而保证工件受抓以及放回的稳定性的一种桁架机器人用旋转料仓。
7.为实现上述目的,本实用新型提供了如下技术方案:包括料仓,所述料仓上转动安装有转动盘以及用于驱动转动盘转动的旋转机构,且转动盘的转动轴向沿竖向设置,所述转动盘上方沿周向排列设置有若干的供应位,各所述供应位设置有储料腔,各所述储料腔沿竖向延伸设置,且各储料腔上方设置有取料口,所述料仓上设置有上料工位以及下料工位,且上料工位与下料工位均位于各供应位的转动轨迹上,所述料仓位于上料工位设置有沿竖向滑移的上料顶杆、位于下料工位设置有沿竖向滑移的下料顶杆,所述料仓设置有用于驱动上料顶杆滑移的上料机构、用于驱动下料顶杆滑移的下料机构,各所述供应位位于对应的储料腔下端设置有供上料顶杆与下料顶杆朝上插入对应的储料腔的配位插孔,当其中一个供应位位于上料工位时,其中另一个供应位位于下料工位,且位于上料工位的供应位对应的配位插孔位于上料顶杆的运动轨迹上以及位于下料工位的供应位对应的配位插孔位于下料顶杆的运动轨迹上。
8.本实用新型进一步设置为:各所述供应位位于对应的储料腔的外周沿周向设置有若干根导向柱,各所述导向柱的轴向沿竖向设置,各所述供应位沿对应的各导向柱排列方向的径向设置有第一调整轨道,各所述导向柱滑移安装于对应的第一调整轨道。
9.本实用新型进一步设置为:各所述供应位对应的导向柱的数量为至少3根,各所述供应位位于转动盘上方设置有供应盘,各所述供应盘设置有与第一调整轨道相互平行的辅助轨道,各所述导向柱穿设于对应的辅助轨道。
10.本实用新型进一步设置为:各所述第一调整轨道的轨道宽度小于对应的辅助轨道的轨道宽度,各所述导向柱的直径与对应的辅助轨道的轨道宽度相适配,各所述导向柱下端设置有朝下穿设对应第一调整轨道的连接螺杆,各所述连接螺杆的直径与对应的第一调整轨道的轨道宽度相适配,各所述连接螺杆位于转动盘下方螺纹连接有锁紧螺母。
11.本实用新型进一步设置为:所述上料顶杆的数量为若干根,所述下料顶杆的数量与上料顶杆相同,各所述供应位对应的配位插孔的数量与上料顶杆相同。
12.本实用新型进一步设置为:所述料仓上竖向滑移设置有第一连接板以及第二连接板,各所述上料顶杆固定设置于第一连接板,各所述下料顶杆固定设置于第二连接板。
13.本实用新型进一步设置为:所述料仓位于转动盘的下端沿转动盘的周向间距排列设置有若干的顶柱,各所述顶柱上方设置有用于支撑转动盘下端的支撑面,各所述支撑面呈弧形设置。
14.通过采用上述技术方案,1.料仓采用转动盘转动的方式而将不同的供应位转动至上料工位以及下料工位,使得与桁架机器人装配后,桁架机器人上的机械臂在上料工位对应的取料口抓取工件,并通过传输而将工件置入机床内加工,加工完成后,通过机械臂抓取机床内的工件,并通过传输而将工件移动至下料工位对应的取料口并进行下料,其中,由于上料顶杆与下料顶杆的设置,使得当上料工位处的工件被抓取后,上料顶杆朝上推动上料工位对应的储料腔内剩下的工件,使得将最上方的工件抬升至取料口而供下次抓取,使得机械臂抓取工件的位置恒定而保证机械臂抓取的稳定性以及精准性,同理,当机械臂将加工完成的工件放置于下料工位的取料口后,下料顶杆朝下移动而实现下料工位对应的储料腔内的工件在重力作用下朝下移动一个工件的高度来腾空取料口而供下次下料,使得机械臂下料的位置恒定而保证机械臂下料的精准性用于保护工件;2.上料顶杆与下料顶杆采用插设进入配位插孔而对转动盘的周向起到限位作用,从而保证对应的储料腔稳定位于上料工位以及下料工位,从而保证上料以及下料的精准性,此外,当上料工位对应的储料腔内的工件加工完毕后,下料工位对应的储料腔内将会填充满加工完成的工件,因此,便可将上料顶杆与下料顶杆朝下脱出配位插孔,并通过转动盘的转动而将下料工位对应的供应位移出下料工位进行卸料并更换新的需要加工的工件、上料工位对应的供应位移动至下料工位供加工完成的工件下料以及新的供应位移动至上料工位进行加工工件的提供,极大的提高了加工效率;3.上料顶杆与下料顶杆的竖向运动实现在一个供应位内最短的上料与下料行程而提高上下料效率,以及转动盘周向转动的方式不但实现了周向转动自动更换供应位而便捷更换工件,而且通过循环的方式来设计储料腔适当的高度,实现空间利用率最优化。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1为本实用新型具体实施方式的装配图;
17.图2为本实用新型具体实施方式的装配图;
18.图3为本发明具体实施方式中转动盘的剖视图;
19.图4为图3中a的放大图;
20.图5为本实用新型具体实施方式与桁架机器人以及机床装配的使用装配图。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
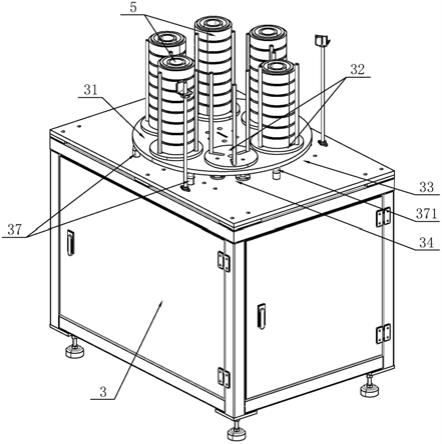
22.如图1-图4所示,本实用新型公开了一种桁架机器人用旋转料仓,包括料仓3,料仓3上采用轴承等方式转动安装有转动盘31(圆盘形)以及用于驱动转动盘31转动的旋转机构(其中,旋转机构由于视角原因未示出,旋转机构包括旋转电机以及减速箱,减速箱安装于料仓3内,并分别与转动盘31以及旋转电机连接,因此,便可通过旋转电机的转动而通过减速机带动转动盘31的周向转动),其中,转动盘31的轴向沿竖向设置,此外,转动盘31上方沿周向排列设置有若干的供应位32,其中,各供应位32设置有储料腔325,各储料腔325沿竖向延伸设置,且各储料腔325上方设置有取料口326,使得可通过取料口326将需要加工或者已经加工完毕的工件5置入储料腔325或者从储料腔325内取出,另外,料仓3上方后侧的左侧设置有上料工位33以及料仓3上方后侧的右侧设置有下料工位34,且上料工位33与下料工位34均位于各供应位32的转动轨迹上,此外,料仓3位于上料工位33设置有沿竖向滑移的上料顶杆331、位于下料工位34设置有沿竖向滑移的下料顶杆341,其中,料仓3内对应上料顶杆331与下料顶杆341分别设置有导向套(视角原因未示出),使得上料顶杆331与下料顶杆341分别穿设于对应的导向套内实现稳定的竖向滑移,此外,料仓3设置有用于驱动上料顶杆331滑移的上料机构332以及用于驱动下料顶杆341滑移的下料机构342,上料机构332与下料机构342采用电机、丝杆、滑块、导轨的方式完成驱动,为常规技术手段,此处不做展开说明,另外,各供应位32位于对应的储料腔325下端设置有供上料顶杆331与下料顶杆341朝上插入对应的储料腔325的配位插孔321,其中,当其中一个供应位32位于上料工位33时,相邻的另一个供应位32位于下料工位34,且位于上料工位33的供应位32对应的配位插孔321位于上料顶杆331的运动轨迹上以及位于下料工位34的供应位32对应的配位插孔321位于下料顶杆341的运动轨迹上。
23.如图5所述,将料仓3与桁架机器人以及机床6装配后,机床6设置于桁架机器人的左侧,而料仓3设置于桁架机器人的右侧,其中桁架机器人包括机架1、传输机构2以及机械臂4,传输机构2安装于机架1,而机械臂4安装于传输机构2,且机械臂4在传输机构2的传输作用下,可在料仓3与机床6之间运动,用于将料仓3上的工件5传输至机床6进行加工,以及用于将机床6加工完成的工件5传输回料仓3,因此,料仓3采用转动盘31转动的方式而将不同的供应位32转动至上料工位33以及下料工位34,使得机械臂4通过传输机构2进行移动,并移动至上料工位33对应的取料口326抓取工件5,之后通过传输机构2将工件5传输置入机床6内加工,加工完成后,通过机械臂4抓取机床6内的工件5,并通过传输机构2移动而将工
件5移动至下料工位34对应的取料口326并进行下料,其中,由于上料顶杆331与下料顶杆341的设置,使得当上料工位33处的工件5被抓取后,上料顶杆331朝上推动上料工位33对应的储料腔325内剩下的工件5,使得将最上方的工件5抬升至取料口326而供下次抓取,使得机械臂4抓取工件5的位置恒定而保证机械臂4抓取的稳定性以及精准性,同理,当机械臂4将加工完成的工件5放置于下料工位34的取料口326后,下料顶杆341朝下移动而实现下料工位34对应的储料腔325内的工件5在重力作用下朝下移动一个工件5的高度来腾空取料口326而供下次下料,使得机械臂4下料的位置恒定而保证机械臂4下料的精准性用于保护工件5,另外,上料顶杆331与下料顶杆341采用插设进入配位插孔321而对转动盘31的周向起到限位作用,从而保证对应的储料腔325稳定位于上料工位33以及下料工位34,从而保证上料以及下料的精准性,此外,当上料工位33对应的储料腔325内的工件5加工完毕后,下料工位34对应的储料腔325内将会填充满加工完成的工件5,因此,便可将上料顶杆331与下料顶杆341朝下脱出配位插孔321,并通过转动盘31的转动而将下料工位34对应的供应位32移出下料工位34进行卸料并更换新的需要加工的工件5、上料工位33对应的供应位32移动至下料工位34供加工完成的工件5下料以及新的供应位32移动至上料工位33进行加工工件5的提供,极大的提高了加工效率,以及上述的结合可知,上料顶杆331与下料顶杆341的竖向运动实现在一个供应位32内最短的上料与下料行程而提高上下料效率,以及转动盘31周向转动的方式不但实现了周向转动自动更换供应位32而便捷更换工件5,而且通过循环的方式来设计储料腔325适当的高度,实现空间利用率最优化。
24.另外,本实施例中的各供应位32位于对应的储料腔325的外周沿周向设置有若干根导向柱322,各导向柱322的轴向沿竖向设置,此外,各供应位32沿对应的各导向柱322排列方向的径向设置有第一调整轨道323,各导向柱322滑移安装于对应的第一调整轨道323,从而可根据工件5的不同大小进行各导向柱322的移动来调整储料腔325的实际大小适配工件5。
25.优选的,本实施例中的各供应位32对应的导向柱322的数量为至少3根(本实施例采用3根),其中,各供应位32位于转动盘31上方设置有供应盘324(呈圆盘状),各供应盘324设置有与第一调整轨道323相互平行的辅助轨道3241,且各导向柱322穿设于对应的辅助轨道3241,因此,通过设置供应盘324而位于上料工位33的供应位32在上料顶杆331的推动作用下带动供应盘324朝上滑移而代替上料顶杆331推动工件5,同理,下料工位34的供应位32在下料顶杆341的支撑作用下支撑供应盘324朝下滑移而代替下料顶杆341支撑工件5,使得对工件5的推动以及支撑更加的稳定,此外,当三根导向柱322分别插设于对应的第一调整轨道323以及辅助轨道3241,便可实现转动盘31与供应盘324的自动对位,从而实现供应盘324更加精准便捷的安装,保证工件5稳定放置于储料腔325,并进入从储料腔325内被抓取以及放入储料腔325。
26.优选的,本实施例中的各第一调整轨道323的轨道宽度小于对应的辅助轨道3241的轨道宽度,各导向柱322的直径与对应的辅助轨道3241的轨道宽度相适配,各导向柱322下端设置有朝下穿设对应第一调整轨道323的连接螺杆3221,各连接螺杆3221的直径与对应的第一调整轨道323的轨道宽度相适配,各连接螺杆3221位于转动盘31下方螺纹连接有锁紧螺母3222,使得导向柱322采用连接螺杆3221穿设第一调整轨道323实现限位,并通过导向柱322在上、锁紧螺母3222在下锁紧而与转动盘31固定连接,此外,导向柱322的直径适
配辅助轨道3241,便可完成对供应盘324的周向限位,保证供应盘324滑移的稳定性。
27.优选的,本实施例中的上料顶杆331的数量为若干根(本实施例采用3根,且沿供应盘324的周向等间距排列设置),对应的,下料顶杆341的数量与上料顶杆331相同,以及各供应位32对应的配位插孔321的数量与上料顶杆331相同,因此,通过多根上料顶杆331与多根下料顶杆341周向驱动供应盘324,使得供应盘324的支撑更加的稳定。
28.优选的,本实施例中的料仓3内设置有第一连接板35以及第二连接板36,其中,各上料顶杆331采用螺纹连接等方式固定设置于第一连接板35,各下料顶杆341采用螺纹连接等方式固定设置于第二连接板36,而第一连接板35与上料机构332对应的滑块连接而受上料机构332驱动竖向滑移,第二连接板36与下料机构342对应的滑块连接而受下料机构342驱动竖向滑移,使得各上料顶杆331在第一连接板35的连接作用下同步运动、各下料顶杆341在第二连接板36的连接作用下同步运动,实现各上料顶杆331同步对对应的供应盘324进行驱动、下料顶杆341同步对对应的供应盘324进行驱动,提高驱动的稳定性。
29.另外,本实施例中的料仓3位于转动盘31的下端沿转动盘31的周向间距排列设置有若干的顶柱37,其中,各顶柱37上方设置有用于支撑转动盘31下端的支撑面371,且各支撑面371呈弧形设置,使得通过顶柱37对转动盘31的周向进行均匀支撑,且接触面积更小而使得转动滑移更加的顺畅。
30.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。