1.本实用新型涉及抓卸料技术领域,更具体地说,涉及一种废钢料自动装卸系统。
背景技术:
2.现有的废钢回收再利用产业链属于小散乱差,不仅废钢回收加工工艺的技术含量低,就连废钢到厂后,相关作业流程的技术集成度也处于较低水平。首先是废钢料的装卸仍然依赖人工装卸方式,自动化水平不高且对生产安全造成挑战。同时装卸过程中涉及的废钢质量检验对于客户也就是钢铁企业的生产管理中占有重要地位,是钢铁治炼过程中重要的控制环节。传统废钢的检验定级主要靠目测等方式,疑难问题还需请经验丰富的质检员判定,人为因素大、手续较繁琐、判级质量异议较多。更有个别供货商为追求利益最大化会铤而走险,在装车送废钢时,施尽手段、费尽心机,甚至拉拢废钢验级人员,增加了验级和管理的难度。
3.经检索,中国专利申请号:2017218252453,发明创造名称为:移动式吸盘车,该申请案包括挖掘机本体和挖掘机手臂,挖掘机手臂的活动端端头设有电吸盘,电吸盘与挖掘机手臂可拆卸连接并可在挖掘机手臂的带动下活动;挖掘机本体上设有与电吸盘电气连接的电机,挖掘机本体的控制室内设有用于控制电吸盘启闭的控制系统;电吸盘的底面还设有多个可向内收拢的卡爪,卡爪由控制系统控制启动。该申请案将挖掘机的挖斗替换为电吸盘,对废钢铁的吸取更为方便,再通过在电吸盘上设置卡爪进行辅助抓取,避免因吸力不够造成废钢铁掉落,大大提高了作业的安全性。
4.又如中国专利申请号:2019110101389,发明创造名称为:一种履带式抓钢机计量装置,该申请案包括斗杆和抓取机构,抓取机构包括抓斗和抓手,抓取机构包括称重传感器,称重传感器的一端通过悬挂块连接在斗杆上,称重传感器包括环状弹性体,环状弹性体两侧外壁上设有同心但不贯通的两个凹槽;凹槽之间的壁为感应壁,感应壁上设有感应电路,包括粘贴在感应壁两侧壁上的电阻应变片,电阻应变片电连接有各种补偿电阻,用于补偿电路中的误差。该申请案通过设置称重传感器,解决了对废钢的称重成本消耗过大、称重方式不便的问题。以上是目前行业内常见的几种抓料卸料方式,但仍有进一步优化的空间。
技术实现要素:
5.1.实用新型要解决的技术问题
6.本实用新型的目的在于克服传统废钢到厂卸料中自动化程度低、人工占比高的问题,拟提供一种废钢料自动装卸系统,能够对废钢进行有效抓取卸料,应用灵活方便,有助于提高作业效率。
7.2.技术方案
8.为达到上述目的,本实用新型提供的技术方案为:
9.本实用新型的一种废钢料自动装卸系统,包括车体和起吊臂,起吊臂的端部设置有连接架,连接架的两端分别设置有整料抓取单元和散料吸附单元,整料抓取单元包括有
多组夹爪,每组夹爪上均设有用于控制其展开收缩的推送动力;散料吸附单元包括电磁吸盘,电磁吸盘上设有升降动力,升降动力用于驱动控制电磁吸盘的高度与夹爪的高度错开。
10.更进一步地,整料抓取单元通过顶部的第一固定座安装于连接架的一端,散料吸附单元通过第二固定座安装于连接架的另一端,第二固定座上沿周向间隔设有弹性的连接绳与电磁吸盘连接,电磁吸盘上对应设有连接吊耳;升降动力一端安装于第二固定座上,一端与电磁吸盘顶部连接。
11.更进一步地,第二固定座上设有两组升降动力分别与电磁吸盘连接,且每组升降动力的连接端与电磁吸盘之间为铰接,两组升降动力分别连接在电磁吸盘的两侧。
12.更进一步地,第一固定座和第二固定座均通过可拆卸连接方式与连接架连接安装,且连接架中部也设有安装位置。
13.更进一步地,整料抓取单元包括第一固定座,第一固定座的底盘侧壁上沿周向间隔设有多组安装座,底盘下方通过中间连接柱连接有夹爪盘,夹爪盘侧壁上沿周向间隔铰接设有多组夹爪,推送动力的一端与安装座铰接,另一端与夹爪的外壁铰接。
14.更进一步地,推送动力和升降动力均采用气缸。
15.更进一步地,整料抓取单元和散料吸附单元上均设有称重传感器。
16.更进一步地,起吊臂的端部还设有摄像机。
17.3.有益效果
18.采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
19.(1)本实用新型的一种废钢料自动装卸系统,设有整料抓取单元和散料吸附单元,利用整料抓取单元对废钢运输车厢中的大块钢料进行抓取,残存的一些不便抓取的碎料则利用散料吸附单元进行抓取,通过两者配合实现对废钢的充分卸料,应用更加灵活方便,且卸料效率有所提高。
20.(2)本实用新型的一种废钢料自动装卸系统,散料吸附单元的电磁吸盘上设有升降动力,升降动力用于驱动控制电磁吸盘的高度与夹爪的高度错开,避免两者作业时互相影响,能够充分满足单独部件抓取的操作便利性,保证卸料效率。
21.(3)本实用新型的一种废钢料自动装卸系统,第二固定座上设有两组升降动力分别与电磁吸盘铰接,可以有效调整电磁吸盘的倾斜和吸附角度,实际使用中根据现场作业环境可以进行灵活调整,充分保障卸料效果。
附图说明
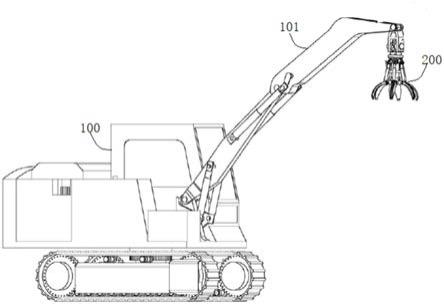
22.图1为本实用新型的一种废钢料自动装卸系统的结构示意图;
23.图2为本实用新型中整料抓取机构的结构示意图;
24.图3为本实用新型中散料吸附单元和整料抓取单元的分布结构示意图;
25.图4为本实用新型中散料吸附单元和整料抓取单元的分布结构示意图。
26.示意图中的标号说明:
27.100、车体;101、起吊臂;102、连接架;200、整料抓取单元;201、第一固定座;202、底盘;203、安装座;204、推送动力;205、夹爪盘;206、夹爪;301、第二固定座;302、升降动力;303、连接绳;304、电磁吸盘。
具体实施方式
28.为进一步了解本实用新型的内容,结合附图对本实用新型作详细描述。
29.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.下面结合实施例对本实用新型作进一步的描述。
31.实施例1
32.如图1-图4所示,本实施例的一种废钢料自动装卸系统,包括车体100和起吊臂101,目前行业内往往直接利用起吊臂101的铲斗或配设安装机械抓手进行废钢卸料,应用中多有不便,本实施例正是针对这种情况进行了有效调整,具体地,起吊臂101的端部设置有连接架102,连接架102的两端分别设置有整料抓取单元200和散料吸附单元,利用整料抓取单元200对废钢运输车厢中的大块钢料进行抓取,残存的一些不便抓取的碎料则利用散料吸附单元进行抓取,通过两者配合实现对废钢的充分卸料,应用更加灵活方便,且卸料效率有所提高。
33.具体地,本实施例中整料抓取单元200包括有多组夹爪206,每组夹爪206上均设有用于控制其展开收缩的推送动力204;散料吸附单元包括电磁吸盘304,电磁吸盘304上设有升降动力302,升降动力302用于驱动控制电磁吸盘304的高度与夹爪206的高度错开。实际使用时,先利用整料抓取单元200进行大料抓取,此时控制电磁吸盘304的高度高于夹爪206,避免影响整料抓取单元200的灵活作业,当需要抓取剩余散料时,则控制电磁吸盘304的高度下降低于夹爪206,避免整料抓取单元200对其造成影响,通过两者的高度调节,能够充分满足单独部件抓取的操作便利性,保证卸料效率。
34.如图3所示,整料抓取单元200通过顶部的第一固定座201安装于连接架102的一端,散料吸附单元通过第二固定座301安装于连接架102的另一端,第二固定座301上沿周向间隔设有弹性的连接绳303与电磁吸盘304连接,电磁吸盘304上对应设有连接吊耳;具体在电磁吸盘304的边缘均匀间隔设有三根连接绳303进行吊装,进一步增强电磁吸盘304的安装稳定性。升降动力302一端安装于第二固定座301上,一端与电磁吸盘304顶部连接。推送动力204和升降动力302均采用气缸。
35.实施例2
36.本实施例的一种废钢料自动装卸系统,基本同实施例1,更进一步地,本实施例中第二固定座301上设有两组升降动力302分别与电磁吸盘304连接,且每组升降动力302的连接端与电磁吸盘304之间为铰接,两组升降动力302分别连接在电磁吸盘304的两侧。如图4所示,通过设置两组升降动力302可以有效调整电磁吸盘304的倾斜和吸附角度,实际使用中根据现场作业环境可以进行灵活调整,充分保障卸料效果。
37.本实施例中第一固定座201和第二固定座301均通过可拆卸连接方式与连接架102连接安装,具体可通过螺栓紧固连接,且连接架102中部也设有安装位置,当只需要单独采用某一部件进行使用时,亦可单独将整料抓取单元200或散料吸附单元安装于连接架102上,充分适应各种现场操作环境。如图1所示即为单独安装整料抓取单元200的结构示意图。
38.实施例3
39.本实施例的一种废钢料自动装卸系统,基本同实施例1,更进一步地,如图2所示,本实施例中整料抓取单元200包括第一固定座201,第一固定座201的底盘202侧壁上沿周向间隔设有多组安装座203,底盘202下方通过中间连接柱连接有夹爪盘205,夹爪盘205侧壁上沿周向间隔铰接设有多组夹爪206,推送动力204的一端与安装座203铰接,另一端与夹爪206的外壁铰接。通过推送动力204的伸缩推送实现夹爪206的内缩和外扩控制,从而满足取料和卸料过程。
40.本实施例中整料抓取单元200和散料吸附单元上均设有称重传感器,具体可设置在夹爪盘205上或电磁吸盘304上,可以直接对取料废钢进行称重统计,便于了解卸料信息;更进一步地,起吊臂101的端部还设有摄像机,作业人员操作时根据摄像机采集的现场废钢信息及时判断应采用哪种卸料方式,以及对应控制起吊臂101的作业位置等。
41.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。