1.本技术涉及一种可调式对中机构,属于织物平复行进的运输、纠偏、定位、张紧、平整或引导薄材技术领域。
背景技术:
2.对中机也称开幅对中机、拓幅对中机或撑幅对中机,主要用于各种机织、针织等织物平幅行进过程中的纠偏对中。现有的开幅对中机,主要起到对中作用的是对中装置,对中装置包括互相平行设置的一对纠偏辊,纠偏辊的两端转动设置在摆动架上,机架上设有驱动摆动架摆动的气缸,工作时,由信号发射元件发出信号给电气控制箱,由电气控制箱将信号反馈给用于控制气缸动作的电磁控制阀,使气缸的活塞杆向缸体外伸展,从而推动一对纠偏辊的一端下倾,而另一端昂起,在该状态下,平布会自动地从先前的偏向右侧而纠正至不偏不倚的状态,反之亦然。
3.然而上述装置也存在非常明显的缺陷:
4.第一,张力不稳定,容易出现扩福不匀现象。对中多出现在放卷收卷过程中,放卷端的面料厚度逐渐减小,收卷端的面料厚度逐渐增加,在这个过程中,面料与张力辊之间的包角逐渐变小,那么面料上的张力势必也会发生波动,特别是对于没有额外张力施加的松式收放卷装置来讲,这种张力对于扩福效果较为致命且影响明显。
5.第二,无法与印花配合,即放卷与印版无法达到配合。常规的收放卷都是连续作业过程,而印花则是一帧一帧的间歇式作业过程,如果想实现边放卷、边印花,不仅要将上述两种作业过程进行配合,还要兼顾张力的问题,两者不论哪一项出现问题,都会出现错版、重印等缺陷,影响印刷效果。
6.第三,调节效率低,且多为人工操作。在张力调节过程中,一般是采用手轮,通过手动顺时针或逆时针旋转手轮,改变张力辊的高度,从而实现张力调节,调节幅度与调节大小全靠手工和经验,效率低,精度差。
技术实现要素:
7.有鉴于此,本技术提供一种可调式对中机构,不仅可以实现整个操作过程中张力恒定,还能实现送布与印花的同步进行。
8.具体地,本技术是通过以下方案实现的:
9.一种可调式对中机构,包括内辊和设置在内辊外周的滑动铝条,内辊由对中电机驱动,滑动铝条随内辊做同步转动,滑动铝条中部设置有间隙,且间隙沿圆周方向呈宽度渐变分布,滑动铝条表面包覆有摩擦层,以带动布匹运行;内辊端部卡套有摆臂,摆臂与丝杆啮合连接,丝杆由丝杆电机驱动。
10.本案的可调式对中机构以丝杆电机和对中电机作为对中辊的两个驱动元件,通过各部件的配合,实现对中辊的对中与输送两种工作状态:
11.(1)对中:布匹在输入初始阶段需要一次对中。丝杆电机驱动丝杆转动,丝杆与摆
臂啮合连接,当丝杆转动时,该转动转化为摆臂的左右位移;摆臂下端卡套在内辊上,当摆臂左右位移时,内辊会随之发生左右位移,滑动铝条中部设置间隙,当滑动铝条随内辊左右摆动至间隙移动至布匹中间时,即完成对中辊与布匹的对中;丝杆电机不再作业,对中电机开始工作。
12.(2)输送:对中电机驱动内辊转动,其上的滑动铝条随之转动,此时整个对中辊仅起到导辊的作用,与其他部件配合,完成布匹的输送。在布匹输送过程中,由于滚动铝条表明设置的摩擦层的存在,可以带动布匹随对中辊转动而移动,实现无动力进步。
13.当布匹发生倾斜,即偏移中心位置时,丝杆电机再次作业,转入对中工作状态,对中完成后,丝杆电机停止工作对中电机作业,继续进行布匹输送,如此循环往复,实现布匹输送中对中的实施调控。整个过程中,通过两个不同电机的相互配合,实现输送与实时对中的自动进行,避免因中心位置偏移引起的印花错位或者重印。
14.进一步的,作为优选:
15.所述摩擦层为摩擦系数较大的绒带,借助于摩擦力即可实现布的传动,实现输送过程进布架的无动力进布。
16.在对中辊前后,还可以设置至少一个随动辊/主动辊。常规布匹本技术的上述装置已经可以满足进布架的无动力进布,但对于摩擦系数较低的布,可以在对中辊前后设置随动辊作为动力,随动辊与对中辊用链轮连接,在随动辊表面增加绒带等方式来强化摩擦,借助于摩擦力实现对布的传动。
17.所述摆臂端部通过球面轴承卡套在内辊端部,摆臂与内辊之间不仅有同步联动的摆动,还有内辊自己的转动,如采用固定连接,则会发生卡死现象,而采用活动连接,则又无法保证摆动的有效进行。采用球面轴承,其外圈外径表面为球面,承受以径向负荷为主的径向,避免了转动与摆动两个方向运动所产生的扭矩。
18.所述摆臂端部设置有螺母,摆臂通过螺母与丝杆啮合。螺母两端做成圆在压块下滑动,会随着摆动相对于摆臂上下运动,相对于丝杆前后运动;以螺母为中转,将摆臂与丝杆螺纹啮合,实现摆臂与丝杆连接的同时,也完成了丝杆与摆臂的同步运动,传动效率高。
附图说明
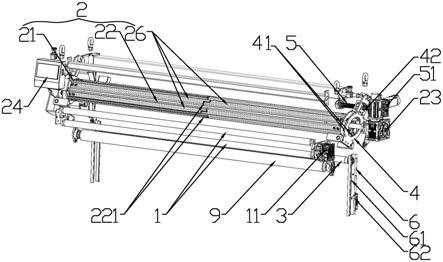
19.图1为本技术的应用状态结构示意图(拆除机架后);
20.图2为本技术进布侧时的立体结构示意图(为方便显示,省略摩擦层);
21.图3为本技术出布侧时的立体结构示意图(为方便显示,省略摩擦层);
22.图4为本技术使用状态的正面结构示意图(为方便显示,省略摩擦层);
23.图5为图4中a-a方向剖面图;
24.图6为本技术进布时的状态示意图(为方便显示,省略摩擦层);
25.图7为本技术中布匹走势图。
26.图中标号:a.布匹;1.进布架;11.减速机;2.对中辊;21.内辊;22.滑动铝条;221.间隙;23.对中电机;24.显示器;25.对边感应器;26.摩擦层;3.张力辊;4.摆臂;41.球面轴承;42.螺母;43.摆臂连杆;5.丝杆;51.丝杆电机;6.升降架;61.齿条;62.限位条;7.机架;8.上布架;9.随动辊。
具体实施方式
27.结合进布架1等使用时的各部件,对本实施例可调式对中机构进行方案说明,结合图1,包括顺次设置的进布架1、对中辊2、张力辊3,对中辊2包括内辊21和设置在内辊21外周的滑动铝条22,内辊21由对中电机23驱动,滑动铝条22随内辊21做同步转动,滑动铝条22中部设置有间隙221,且间隙221沿圆周方向呈宽度渐变分布,滑动铝条22表面包覆有摩擦层26,以带动布匹运行;内辊21端部卡套有摆臂4,摆臂4与丝杆5啮合连接,丝杆5由丝杆电机51驱动;张力辊3配合安装有距离感应器,距离感应器根据设定距离控制张力辊3状态,以保持供入布匹恒张力。
28.结合图6和图7,本案的可调式对中机构以丝杆电机51和对中电机23作为对中辊2的两个驱动元件,通过各部件的配合,实现对中辊2的对中与输送两种工作状态:
29.(1)对中:布匹a在输入初始阶段需要一次对中。丝杆电机51驱动丝杆5转动,丝杆5与摆臂4啮合连接,当丝杆5转动时,该转动转化为摆臂4的左右位移;摆臂4下端卡套在内辊21上,当摆臂4左右位移时,内辊21会随之发生左右位移,滑动铝条22中部设置间隙221,当滑动铝条22随内辊21左右摆动至间隙221移动至布匹中间时,即完成对中辊2与布匹a的对中;丝杆电机51不再作业,对中电机23开始工作。
30.(2)输送:对中电机23驱动内辊21转动,其上的滑动铝条22随之转动,对中辊2上的滑动铝条22有摩擦系数较大的绒带,借助于摩擦力即可实现布的传动,实现输送过程进布架1的无动力进布,此时整个对中辊2仅起到导辊的作用,与其他部件配合,完成布匹的输送。
31.当布匹a发生倾斜,即偏移中心位置时,丝杆电机51再次作业,转入对中工作状态,对中完成后,丝杆电机51停止工作,对中电机23作业,继续进行布匹a输送,如此循环往复,实现布匹a输送中对中的实施调控。整个过程中,通过两个不同电机的相互配合,实现输送与实时对中的自动进行,避免因中心位置偏移引起的印花错位或者重印。
32.在印花前(可通过显示器24,显示器24与各传感器如张力传感器、对边感应器25等连接,实现信号的接收、中转与显示)进行张力的设定,如果仅为布匹a的输送,则不会发生张力变化;但与印花配合时,由于印花为一帧一帧按压进行的非连续作业过程,印花的停顿时间会引起布匹a表面张力的变化,并在印花工序中表现为前一帧印花与后一帧印花的印花位置差异,印花效果上则体现为错位或重印;当布匹运行距离发生变化时,距离感应器检测到该信号,并根据该信号,控制张力辊3状态,使布匹a表面张力始终保持在设定值,使整个传输过程中布匹始终处于恒张力状态。
33.上述对中与张力调控两方面工作的配合,杜绝了布匹a输送中因张力和中心位置偏移引起的印花差异,将连续送布与间歇印花连贯配合起来,实现送布与印花的同步进行。
34.作为一个备选方案:结合图2,摆臂4端部通过球面轴承41卡套在内辊21端部,摆臂4与内辊21之间不仅有同步联动的摆动,还有内辊21自己的转动,如采用固定连接,则会发生卡死现象,而采用活动连接,则又无法保证摆动的有效进行。采用球面轴承41来实现摆臂4与内辊21的连接,球面轴承41外圈外径表面为球面,承受以径向负荷为主的径向,避免了转动与摆动两个方向运动所产生的扭矩。
35.作为一个备选方案:结合图2,摆臂4端部设置有螺母42,摆臂4通过螺母42与丝杆5啮合。以螺母42为中转,将摆臂4与丝杆5螺纹啮合,螺母42两端做成圆在压块下滑动,螺母
42会随着摆动相对于摆臂4上下运动,相对于丝杆5前后运动,实现摆臂4与丝杆5连接的同时,也完成了丝杆5与摆臂4的同步运动,传动效率高。
36.作为一个备选方案:螺母42与球面轴承41可以同时设置,即在摆臂4的一端设置球面轴承41,并通过球面轴承41将摆臂4的该端卡套在内辊21上,摆臂4的另一端设置螺母42,螺母42与丝杆5螺纹连接,螺母42则与摆臂4固定,通过螺母42,实现摆臂4与丝杆5的特殊连接。
37.作为一个备选方案:结合图1、图4和图5,张力辊3端部设置升降架6,张力辊3与升降架6之间以齿轮啮合方式连接,在张力辊3端部设置齿轮,升降架6上设置齿条61,齿轮与齿条61配合,实现张力辊3与升降架6的齿轮啮合。当距离传感器传出信号后,张力辊3沿升降架6的齿轮升降。以齿轮啮合方式实现升降,布匹移动距离在设定值时,张力辊3仅起到导辊的作用,引导布匹a前行;当移动距离出现波动时,距离传感器检测到波动值,并将该信号传递至张力辊3的动力源(图中未显示,可采用电机、气缸等)处,动力源据此带动张力辊3沿着齿轮升降,以齿数控制压力变化,不仅确保了压力控制精确,而且轨道精准,还避免了常规升降引起的震动。
38.结合图1,升降架6上设置有限位条62,限位条62,避免张力辊3移动过程中发生窜动。
39.对于调节张力的方式,张力辊3还可以配套设置气缸作为动力源,气缸连接有气压表,通过调节汽缸内部压力,控制张力大小,或者,张力辊3设置配重块来改变布的张力,通过距离感应器感应距离来保持恒张力。
40.上述方案中,结合图2-图5,以左右两个机架7作为框架,在机架7之间分别设置上布架8、进布架1、(前)随动辊9、对中辊2、(中)随动辊、张力辊3、(后)随动辊,送至印花工序。其中:上布架8直接安装在两个机架7之间,(前、中、后)随动辊9支承于两个机架7之间。
41.一侧机架7或两侧机架7上设置有升降架6,升降架6可以采用在机架7上开槽、并在槽内设置齿条的结构,也可以是单独的带齿条的结构,然后固定在机架7上,张力辊3端部设置与上述齿条对应的齿轮,升降架6的齿条与张力辊3的齿轮啮合,将张力辊3支承于两个机架7之间。张力辊3可以根据距离传感器检测的单位时间行进距离来作为控制张力辊3运行状态的信号,控制张力辊3沿升降架6规律上下位移,以确保恒张力过程。
42.对中电机23、丝杆电机51分别固定在一侧机架7上,对中电机23的输出轴与内辊21连接,丝杆电机51的输出轴与丝杆5连接,摆臂4上端设置有螺母42,螺母42与丝杆5螺纹连接;摆臂4下端通过球面轴承41卡套在内辊21端部,滑动铝条22有多组,每组均由两片构成,多组滑动铝条沿内辊21外壁安装,且每组中的两片在中间对接处均有缝隙,这些缝隙最终形成一条自下而上(从上布架8方向看)宽度递增的间隙221,间隙221宽度不断增大,可实现布匹的展开。
43.对中辊3在日常仅做与内辊21同步转动,此时起到导辊的作用;而在随摆臂4摆动时,则为对中作业。对中作业过程中,不仅要对对中时刻进行控制,还要对对中辊转向进行控制。
44.(1)对中时刻的控制:结合图5,与丝杆电机51相匹配的还有对边感应器25,对边感应器25时刻监控布匹a的位置,当出现偏移中心点时,向丝杆电机51发出启动信号,丝杆电机51启动并带动丝杆5转动,丝杆5通过摆臂4带动内辊21随之左右位移,即表现为滑动铝条
22在随内辊21转动的同时发生左右位移,内辊21以及滑动铝条22相对布匹的中心位置偏移,直至布匹a的中心与间隙221中心(即滑动铝条22和内辊21的中心)重叠,丝杆电机51停止工作,仅对中电机23工作。
45.(2)对中辊转向的控制:对中开始时,要求对中辊22上的间隙221由小变大,且最大间隙位于最上端,并由对边感应器25控制摆臂4左右摆动来确保该状态。