一种锂电容驱动agv移动机器人
技术领域
1.本实用新型属于转运移动机器人技术领域,特别涉及一种锂电容驱动agv移动机器人。
背景技术:
2.随着科技水平的不断提高,在物流、仓库等环境下无技术要求的重复转运货物的工作,越来越趋近于智能化,利用agv技术取代传统人工驾驶运输车进行转运的工作,传统的agv移动机器人在使用过程中出现以下问题:1)传统的移动机器人多为平板结构,适合转运大型货物,但是平板结构无法对小型货物或颗粒物体等材料进行有效固定,导致运输效率低,运输局限性大;2)传统的agv移动机器人采用蓄电池或安装导轨的形式为agv移动机器人提供动力,蓄电池由于充放电速度慢,无法保证长时间工作,转运效率低,由于放电速度慢,无法提供强劲的动力,导致蓄电池驱动的移动机器人无法进行重物运输;采用导轨的移动机器人一般在导轨内部接交流电,但是导轨铺设成本高,对场地有要求,并且无法自由移动,并且导轨内接电对工作环境要求较高,若导电物体进入导轨内会造成短路,影响转运,存在较大安全隐患。
技术实现要素:
3.本实用新型的目的是克服现有技术中不足,提供一种锂电容驱动agv移动机器人,能够通过安装拆卸储物箱,完成对各种规格物体的转运操作,并且通过在底板上增设固定底座,方便对物体的固定,适用范围更广,并且锂电容续航时间更长,运输效率更高。
4.为了实现上述目的,本实用新型采用的技术方案是:
5.一种锂电容驱动agv移动机器人,包括车体、车架、储物箱、盖板、超声波传感器、激光扫描仪、车轮、驱动电机、制动装置、固定板、底板、保护箱、电机控制器、启动控制器、中央控制器、升压器、锂电池充电机、锂电容、充电插座、示廓灯、显示屏、吊环、卡扣、限位板ⅰ、仓盖、限位轴、连接杆、配重箱、固定底座、弹簧、限位板ⅱ,所述车架下方设有四组车轮,车轮一侧设有驱动电机,驱动电机一侧设有制动装置,车架上方固定安装有车体,车体四周设有若干示廓灯,车体前端设有显示屏,车体一侧设有充电插座,车体上方设有底板,底板前后两端分别设有若干超声波传感器与激光扫描仪,底板两侧设有限位板ⅱ,底板内活动安装有固定底座,固定底座下方设有弹簧,底板上活动安装有若干储物箱,储物箱底部设有若干限位板ⅰ,储物箱上方固定安装有若干吊环,储物箱一侧活动安装有卡扣,储物箱上方活动安装有盖板,盖板上方开孔,孔的外侧设有仓盖,盖板一侧设有限位轴,盖板另一侧活动设有连接杆,连接杆另一端设有配重箱,车体下方设有固定板,固定板上设有保护箱,保护箱一侧设有锂电容,保护箱内部设有电机控制器、启动控制器、中央控制器、升压器、锂电池充电机。
6.所述锂电容包括上端盖、电容组、热均衡和热扩散装置、正极接线口、箱体、熔断器、充电接口、总开关、负极接线口、充电插头,箱体上方设有上端盖,箱体内部设有若干电
容组,两相邻电容组之间设有热均衡和热扩散装置,若干电容组放电端子通过串联汇流排串联后连接熔断器输入端,熔断器输出端通过电路连接正极接线口与负极接线口,熔断器设于箱体一侧,正极接线口与负极接线口设于熔断器两侧,固定安装在箱体上,负极接线口一侧设有总开关,正极接线口与负极接线口下方分别设有两组相同的充电接口,充电接口固定安装在箱体上,充电接口外侧套接充电插头。
7.所述热均衡和热扩散装置包括导热板、折线板、通孔,折线板两侧固定安装有两片导热板,折线板上设有若干通孔。
8.优选的,所述车轮外侧设有条形纹路,增大车轮与地面的摩擦,防止打滑。
9.优选的,所述底板上设有若干条凹槽,便于利用叉车对储物箱或货物进行叉运操作。
10.优选的,所述导热板和折线板材质为铜,有利于温度的传导和散热。
11.优选的,所述上端盖上设有护板,将上端盖盖在箱体上时,护板深入电容组与箱体之间空隙,防止电容组移动。
12.本实用新型与现有技术相比较有益效果表现在:
13.1)通过在底板上方设置储物箱,可完成对颗粒物或小型货物等物体的装卸转运,并且在储物箱上方设置盖板,货物通过盖板上方开口进行装货,卸货时将卡扣打开,盖板在配重箱带动下打开,可将货物在储物箱一侧倾倒出,本装置适用转运货物的范围更广,能够提高转运效率;
14.2)通过在底板上增设若干固定底座,使货物固定更加方便牢靠,固定底座设有弹簧,当底板上没有货物时,固定底座在弹簧的作用下伸出底板表面,便于工作人员使用,当有货物放在底板上时,在货物下方的固定底座被压回底板内部,保证底板的平整性,防止货物倾倒;
15.3)通过在电容组之间增设热均衡和热扩散装置,避免单个电容组的发热情况,使两个相邻电容组之间能够通过导热板、折线板、导热板完成热量的传递,并且在折线板与空气接触面积更大,散热效果更好,折线板上所设通孔有利于空气的流通,进一步的增强散热效果。
附图说明
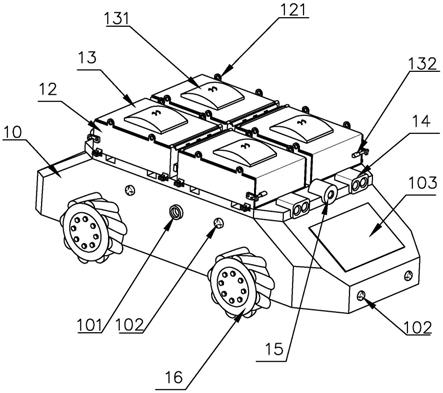
16.附图1是本实用新型一种锂电容驱动agv移动机器人结构示意图;
17.附图2是本实用新型一种锂电容驱动agv移动机器人底部结构示意图;
18.附图3是本实用新型一种锂电容驱动agv移动机器人侧面结构示意图;
19.附图4是底板结构示意图;
20.附图5是固定底座结构示意图;
21.附图6是储物箱结构示意图;
22.附图7是车架结构示意图;
23.附图8是锂电容内是结构示意图;
24.附图9是热均衡和热扩散装置内部结构示意图;
25.图中:10、车体;11、车架;12、储物箱;13、盖板;14、超声波传感器;15、激光扫描仪;16、车轮;17、驱动电机;18、制动装置;19、固定板;20、底板;21、保护箱;22、电机控制器;23、
启动控制器;24、中央控制器;25、升压器;26、锂电池充电机;27、锂电容;101、充电插座;102、示廓灯;103、显示屏;121、吊环;122、卡扣;123、限位板ⅰ;131、仓盖;132、限位轴;133、连接杆;134、配重箱;201、固定底座;202、弹簧;203、限位板ⅱ;271、上端盖;272、电容组;273、热均衡和热扩散装置;274、正极接线口;275、箱体;276、熔断器;277、充电接口;278、总开关;279、负极接线口;2771、充电插头;2731、导热板;2732、折线板;2733、通孔。
具体实施方式
26.为方便本技术领域人员的理解,下面结合附图1-9,对本实用新型的技术方案进一步具体说明。
27.一种锂电容驱动agv移动机器人,包括车体10、车架11、储物箱12、盖板13、超声波传感器14、激光扫描仪15、车轮16、驱动电机17、制动装置18、固定板19、底板20、保护箱21、电机控制器22、启动控制器23、中央控制器24、升压器25、锂电池充电机26、锂电容27、充电插座101、示廓灯102、显示屏103、吊环121、卡扣122、限位板ⅰ123、仓盖131、限位轴132、连接杆133、配重箱134、固定底座201、弹簧202、限位板ⅱ203,所述车架11下方设有四组车轮16,车轮16一侧设有驱动电机17,驱动电机17一侧设有制动装置18,车架11上方固定安装有车体10,车体10四周设有若干示廓灯102,车体前端设有显示屏103,车体10一侧设有充电插座101,车体10上方设有底板20,底板20前后两端分别设有若干超声波传感器14与激光扫描仪15,底板20两侧设有限位板ⅱ203,底板20内活动安装有固定底座201,固定底座201下方设有弹簧202,底板20上活动安装有若干储物箱12,储物箱12底部设有若干限位板ⅰ123,储物箱12上方固定安装有若干吊环121,储物箱12一侧活动安装有卡扣122,储物箱12上方活动安装有盖板13,盖板13上方开孔,孔的外侧设有仓盖131,盖板13一侧设有限位轴132,盖板13另一侧活动设有连接杆133,连接杆133另一端设有配重箱134,车体10下方设有固定板19,固定板19上设有保护箱21,保护箱21一侧设有锂电容27,保护箱21内部设有电机控制器22、启动控制器23、中央控制器24、升压器25、锂电池充电机26。
28.所述锂电容27包括上端盖271、电容组272、热均衡和热扩散装置273、正极接线口274、箱体275、熔断器276、充电接口277、总开关278、负极接线口279、充电插头2771,箱体275上方设有上端盖271,箱体275内部设有若干电容组272,两相邻电容组272之间设有热均衡和热扩散装置273,若干电容组272放电端子通过串联汇流排串联后连接熔断器276输入端,熔断器276输出端通过电路连接正极接线口与负极接线口,熔断器276设于箱体275一侧,正极接线口274与负极接线口279设于熔断器276两侧,固定安装在箱体275上,负极接线口279一侧设有总开关278,正极接线口274与负极接线口279下方分别设有两组相同的充电接口277,充电接口277固定安装在箱体275上,充电接口277外侧套接充电插头2771。
29.所述热均衡和热扩散装置273包括导热板2731、折线板2732、通孔2733,折线板2732两侧固定安装有两片导热板2731,折线板2732上设有若干通孔2733。
30.所述车轮16外侧设有条形纹路,增大车轮16与地面的摩擦,防止打滑。
31.所述底板20上设有若干条凹槽,便于利用叉车对储物箱12或货物进行叉运操作。
32.所述导热板2731和折线板材质为铜,有利于温度的传导和散热。
33.所述上端盖271上设有护板,将上端盖271盖在箱体275上时,护板深入电容组272与箱体275之间空隙,防止电容组272移动。
34.一种锂电容驱动agv移动机器人,工作过程如下:在货物转运的过程中,传统的平板车比较适合转运大型货物,对颗粒物或较多小型物件的转运具有较大局限性,若需要对小型物件或颗粒物进行运输时,将储物箱12安装在底板20上,限位板ⅰ123与限位板ⅱ203对齐安装销轴固定,打开仓盖131进行物料的装货,装货完毕后关闭仓盖131,卸货时,打开卡扣122,盖板13在配重箱134的作用下打开,进行卸货操作;若需要对大型货物进行运输操作,通过吊环121或叉车将储物箱12拆下后,将大型货物放在底板20上,并可通过绳索与固定底座201配合完成固定,从而开始运输,启动控制器23控制移动机器人的启停,中央控制器24完成对设备整体的控制配合,电容组272放电端子通过串联汇流排串联,串联后连接熔断器276一端,熔断器276另一端连接正极接线口274与负极接线口279,正极接线口274与负极接线口279通过电路连接升压器25经电机控制器22为驱动电机17提供动力,超声波传感器14与激光扫描仪15完成对周边物体的感应,能够自动优化行车路线,需要对锂电容27进行充电操作时,将外部电源接入充电插座101,电流经充电插座101进入锂电池充电机26稳压后经充电插头2771进入充电接口277,随后电流经过并联汇流排对若干电容组272进行充电操作。
35.以上内容仅仅是对本实用新型的结构所作的举例和说明,本实用新型涉及的电路元器件包括但不限于超声波传感器、激光扫描仪、电机控制器、启动控制器、中央控制器、升压器、锂电池充电机、充电插座、示廓灯、显示屏、电容组、正极接线口、熔断器、充电接口、总开关、负极接线口、充电插头、放电端子、串联汇流排、并联汇流排均为现有技术中的元器件,电路元器件之间的电性连接均为现有技术中常规的电路连接,不是本实用新型的保护范围。
36.以上内容仅仅是对本实用新型的结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。