1.本实用新型涉及无人驾驶技术领域,尤其涉及一种主动转向装置和无人驾驶三轮车。
背景技术:
2.人在遇到紧急情况的时候往往没法做出最正确的判断和操作,而且在连续驾车车辆过久后驾驶员会疲劳驾驶导致操作变形,故需要一种能辅助驾驶员,在驾驶员没有正确操作或者驾驶员由于疲劳驾驶需要辅助驾驶时,可以帮助驾驶员驾驶车辆,主动对车辆进行直行或转弯的基本操作。
技术实现要素:
3.本实用新型的目的是提供一种主动转向装置和无人驾驶三轮车,旨在解决现有技术中,无法主动对车辆进行转弯基本操作的问题。
4.第一方面,本实用新型实施例提供了一种主动转向装置,包括安装架、车轮、转向执行器、转向底座、转向摇臂、转向拉杆和转向臂。
5.安装架为一左右对称的框架;车轮设置两个;转向执行器设置于所述安装架上的左右对称轴竖直面中;转向底座设置于所述车轮的内侧,所述转向底座的顶部可转动连接所述安装架;所述转向摇臂底部侧面可转动连接所述车轮,所述转向摇臂的顶部连接所述转向底座的底部;所述转向拉杆的一端通过第一转动件与所述转向底座的顶部转动配合连接;转向臂固定于所述转向执行器的法兰上,用于驱使所述转向拉杆带动所述转向底座转动;
6.其中,所述转向底座、转向摇臂、转向拉杆分别设置有两个,且分别对称设置于所述转向执行器的左右两侧。
7.第二方面,本实用新型实施例提供了一种无人驾驶三轮车,包括主动转向装置,还包括:
8.车身骨架;
9.激光雷达,安装于所述车身骨架上用于感知前方障碍物信息;
10.双目相机,设置若干个,安装于所述车身骨架周侧,所述双目相机用于探测车身周围图像信息;
11.转向电机控制器,设置于所述车身骨架中,所述转向电机控制器用于控制所述主动转向装置进行主动转向机动;
12.轮毂电机,设置于所述车身骨架中,所述轮毂电机用于为所述三轮车提供动力;
13.轮毂电机控制器,设置于所述车身骨架中,所述轮毂电机控制器用于控制所述轮毂电机;
14.陀螺仪,设置于所述车身骨架中,所述陀螺仪用于检测车身侧倾角度;
15.导航系统,设置于所述车身骨架中,所述导航系统用于实现自主导航;
16.dbs液压制动器,设置于所述车身骨架中,所述dbs液压制动器用于提供制动压力,线控制动;
17.dbs控制器,设置于车身骨架中,所述dbs控制器用于控制所述dbs液压制动器;
18.电源模块,安装于所述车身骨架底部中间,用于提供电能;
19.其中,所述导航系统、激光雷达、双目相机、陀螺仪分别与设置于所述车身骨架中的工控机连接,所述导航系统通过第一信号通路向所述工控机发送位置信号,所述激光雷达通过第二信号通路向所述工控机发送车身与道路障碍物的距离信号,所述双目相机通过第三信号通路向所述工控机发送车身周侧图像信号,所述陀螺仪通过第四信号通路向所述工控机发送车身侧倾角度信号;
20.所述工控机连接设置于所述车身骨架中的vcu,所述vcu与所述转向电机控制器、轮毂电机控制器和dbs控制器连接,所述工控机通过所述vcu控制所述转向电机控制器、轮毂电机控制器和dbs控制器分别驱动所述主动转向装置、轮毂电机和dbs液压制动器工作。
21.本实用新型实施例通过对称设置于转向执行器左右两侧的转向配合组件(即转向底座、转向摇臂、转向拉杆和转向臂),使得转向执行器在转动时,转向臂同步转动,并通过转向拉杆拉/推动转向底座水平转动,转向摇臂随着转动并带动对应的车轮转动。
附图说明
22.为了更清楚地说明本实用新型实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
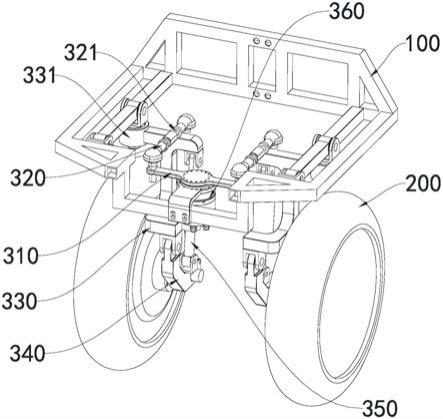
23.图1为本实用新型实施例提供的主动转向装置的结构示意图;
24.图2为本实用新型实施例提供的主动转向装置的另一结构示意图;
25.图3为本实用新型实施例提供的主动转向装置上安装了主动侧倾机构后的结构示意图;
26.图4为本实用新型实施例提供的无人驾驶三轮车的连接关系示意性框图。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.应当理解,当在本说明书和所附权利要求书中使用时,术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
29.还应当理解,在此本实用新型说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本实用新型。如在本实用新型说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
30.还应当进一步理解,在本实用新型说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
31.需要说明的是,图中只有安装架的一边具有减震器,是因为隐藏了,使得结构没有那么紧凑、复杂,方便看图理解。
32.请参阅图1-2,一种主动转向装置,包括安装架100、车轮200、转向执行器360、转向底座330、转向摇臂340、转向拉杆320和转向臂310。
33.安装架100为一左右对称的框架;车轮200设置两个;转向执行器360设置于所述安装架100上的左右对称轴竖直面中;转向底座330设置于所述车轮200的内侧,所述转向底座330的顶部可转动连接所述安装架100;所述转向摇臂340底部侧面可转动连接所述车轮200,所述转向摇臂340的顶部连接所述转向底座330的底部;所述转向拉杆320的一端通过第一转动件与所述转向底座330的顶部转动配合连接;转向臂310固定于所述转向执行器360的法兰上,用于驱使所述转向拉杆320带动所述转向底座330转动;
34.其中,所述转向底座330、转向摇臂340、转向拉杆320分别设置有两个,且分别对称设置于所述转向执行器360的左右两侧。
35.在本实施例中,通过对称设置于转向执行器360左右两侧的转向配合组件(即转向底座330、转向摇臂340、转向拉杆320和转向臂310),使得转向执行器360在转动时,转向臂310同步转动,并通过转向拉杆320拉/推动转向底座330水平转动,转向摇臂340随着转动并带动对应的车轮200转动。
36.以下通过一个例子对主动转向装置的原理进行说明:
37.在进行右转时,控制转向执行器360的输出轴逆时针输出,转向臂310同步逆时针转动,位于转向执行器360右侧的转向臂310一端向前拉动对应的转向拉杆320,使得转向拉杆320带动对应的转向底座330的一端向前,转向底座330的另一端此时可转动连接于所述安装架100上,故转向底座330整体上是以连接所述安装架100的一端为轴进行了水平面上的顺时针旋转,此时对应的车轮200进行顺时针转动。
38.位于转向执行器360左侧的转向臂310的另一端向后推动对应的转向拉杆320,使得转向拉杆320带动对应的转向底座330的一端向后,转向底座330整体上是以转向底座330的另一端为轴进行了水平面上的顺时针旋转,此时对应的车轮200进行顺时针转动,如此即可通过一个转向执行器360驱动两个车轮200同步转动,转动方向和角度一致。
39.在一实施例中,转向底座330转动连接安装架100的连接处亦可命名为转向轴安装位331,转向轴安装位331可以通过转轴可转动连接安装架100,亦可通过转轴可转动连接用于驱使车轮200侧倾的侧倾结构。
40.具体的,侧倾结构可以是一种主动侧倾机构,所述主动侧倾机构包括:
41.侧倾执行器410、侧倾摆臂420、侧倾摇臂440和侧倾拉杆430。
42.侧倾执行器410设置于所述安装架100上的左右对称轴竖直面中;所述侧倾摆臂420的一端连接所述侧倾执行器410;所述侧倾摇臂440的一端可竖向转动连接所述安装架100,所述侧倾摇臂440的底部转动连接所述转向底座330(通过转向轴安装位331);所述侧倾拉杆430的一端通过第三转动件可转动连接所述侧倾摆臂420的另一端,所述侧倾拉杆430的另一端通过第四转动件可转动连接所述侧倾摇臂440的另一端。
43.其中,所述侧倾摆臂420、侧倾摇臂440和侧倾拉杆430分别设置有两个,且分别对称设置于所述侧倾执行器410的左右两侧。
44.在本实施例中,通过对称设置于侧倾执行器410左右两侧的侧倾配合组件(即侧倾摆臂420、侧倾摇臂440和侧倾拉杆430),使得侧倾执行器410在转动时,侧倾摆臂420同步转动(两个侧倾摆臂420位于侧倾执行器410的输出轴的同一径向上,且分别位于输出轴的两侧),并通过侧倾拉杆430拉/推动侧倾摇臂440竖向转动,转向底座330随着下移移动,进而带动两个车轮200之间出现侧倾。
45.以下通过一个例子对主动侧倾机构的原理进行说明:
46.在进行右转时,需要使得左右两个车轮200出现一定的高度差,即右侧的车轮200的高度比左侧的高度高,使得车体整体向右侧倾斜,如此才克服转弯的向心力,避免出现翻车,在右转的时候,侧倾执行器410顺时针转动,使得右侧的侧倾摆臂420随着逆时针旋转,此时该侧倾摆臂420背离侧倾执行器410的一端向上摆动,并拉动对应的侧倾拉杆430向上,带动对应的侧倾摇臂440向上转动,进而拉动转向底座330向上,右侧的车轮200被拉动向上。
47.同理,左侧的侧倾摆臂420随着逆时针旋转,此时该侧倾摆臂420背离侧倾执行器410的一端向下摆动,推动对应的侧倾拉杆430向下,带动侧倾摇臂440向下转动,进而推动转向底座330向下,左侧的车轮200被推动向下。
48.具体的,主动转向装置和主动侧倾机构之间的连接点在于侧倾摇臂440底部(转向轴安装位331)。
49.在一实施例中,第三转动件为第一球铰链。
50.在本实施例中,通过设置成球铰链,使得转动更加自由,且转动角度更大,可以在半球面内进行自由转动。
51.在一实施例中,第四转动件为第二球铰链。
52.在本实施例中,通过设置成球铰链,使得转动更加自由,且转动角度更大,可以在半球面内进行自由转动。
53.在一实施例中,所述转向臂310的中部固定在所述转向执行器360的法兰上,且所述转向臂310的两端均通过第二转动件分别可转动连接所述转向拉杆320。
54.在本实施例中,为了保证转向臂310在转动的时候两端的转动弧线是一样的,将转向臂310的中部固定在转向执行器360的输出法兰上,再将转向臂310的两端分别通过第二转动件连接转向拉杆320。
55.在一实施例中,第一转动件包括可转动配合连接的第一球头螺栓杆端关节轴承和第一球头,所述第一球头竖直设置于所述转向底座330的顶部,所述第一球头螺栓杆端关节轴承设置于所述转向拉杆320的一端。
56.在本实施例中,通过设置成球头螺栓杆端关节轴承和球头的配合转动,使得转动更加自由,且转动角度更大,可以在半球面内进行自由转动。
57.在一实施例中,所述第二转动件包括可转动配合连接的第二球头螺栓杆端关节轴承和第二球头,所述第二球头螺栓杆端关节轴承设置于所述转向拉杆320的另一端,所述第二球头竖直设置于所述转向臂310的一端。
58.在本实施例中,通过设置成球头螺栓杆端关节轴承和球头的配合转动,使得转动
更加自由,且转动角度更大,可以在半球面内进行自由转动。
59.在一实施例中,所述转向摇臂340的顶部可竖向转动连接所述转向底座330的底部,所述转向摇臂340和转向底座330之间设置有减震器350。
60.在本实施例中,将转向摇臂340和转向底座330之间的连接关系设置成可竖向转动,方便对转向摇臂340和转向底座330之间的夹角进行调节;通过设置减震器350,使得转向摇臂340和转向底座330之间具有较好的缓冲,而且调节转向摇臂340和转向底座330之间的连接角度,使得转向摇臂340始终垂直地面。
61.在一实施例中,所述转向底座330的顶部设置成横向延伸的长条,所述第一转动件位于所述长条的内侧一端,所述转向轴安装位331设置于所述长条的外侧一端。
62.在本实施例中,将转向底座330设置成“t”型的,在将顶部一端可转动固定在安装架100上,通过驱动顶部另一端以顶部一端为轴转动,进而带动设置于转向底座330底部的转向摇臂340转动,带动车轮200转动。
63.在一实施例中,所述转向拉杆320的中间设置有两段间隔设置的环形槽321,所述转向拉杆320靠近所述转向底座330的一端连接所述第一球头螺栓杆端关节轴承,所述转向底座330的顶部连接与所述第一球头螺栓杆端关节轴承配合的所述第一球头,所述转向拉杆320靠近所述转向臂310的一端连接所述第二球头螺栓杆端关节轴承,所述转向臂310的顶部连接与所述第二球头螺栓杆端关节轴承配合的所述第二球头。
64.在本实施例中,通过设置环形槽321,方便手握安装。
65.在一实施例中,所述转向底座330向前方和下方延伸使得所述转向底座330的顶部和底部不在同一左右竖直面上,所述转向摇臂340向后方和下方延伸使得所述转向摇臂340的顶部和底部不在同一左右竖直面上,所述减震器350分别连接所述转向底座330的顶部下侧和所述转向摇臂340的底部上侧。
66.在本实施例中,通过将转向底座330和转向摇臂340围设成一个半闭合的框架,使得在转向底座330和转向摇臂340形成的框架的开口处设置的减震器350可以接近于垂直状态,达到较好的减震效果,而且方便调节转向摇臂340转动后与转向底座330的角度,使得转向摇臂340始终垂直地面。
67.请参考图4,一种无人驾驶三轮车,包括主动转向装置,还包括:
68.车身骨架;
69.激光雷达,安装于所述车身骨架上用于感知前方障碍物信息;
70.双目相机,设置若干个,安装于所述车身骨架周侧,所述双目相机用于探测车身周围图像信息;
71.转向电机控制器,设置于所述车身骨架中,所述转向电机控制器用于控制所述主动转向装置进行主动转向机动;
72.轮毂电机,设置于所述车身骨架中,所述轮毂电机用于为所述三轮车提供动力;
73.轮毂电机控制器,设置于所述车身骨架中,所述轮毂电机控制器用于控制所述轮毂电机;
74.陀螺仪,设置于所述车身骨架中,所述陀螺仪用于检测车身侧倾角度;
75.导航系统,设置于所述车身骨架中,所述导航系统用于实现自主导航;
76.dbs液压制动器,设置于所述车身骨架中,所述dbs液压制动器用于提供制动压力,
线控制动;
77.dbs控制器,设置于车身骨架中,所述dbs控制器用于控制所述dbs液压制动器;
78.电源模块,安装于所述车身骨架底部中间,用于提供电能;
79.其中,所述导航系统、激光雷达、双目相机、陀螺仪分别与设置于所述车身骨架中的工控机连接,所述导航系统通过第一信号通路向所述工控机发送位置信号,所述激光雷达通过第二信号通路向所述工控机发送车身与道路障碍物的距离信号,所述双目相机通过第三信号通路向所述工控机发送车身周侧图像信号,所述陀螺仪通过第四信号通路向所述工控机发送车身侧倾角度信号;
80.所述工控机连接设置于所述车身骨架中的vcu,所述vcu与所述转向电机控制器、轮毂电机控制器和dbs控制器连接,所述工控机通过所述vcu控制所述转向电机控制器、轮毂电机控制器和dbs控制器分别驱动所述主动转向装置、轮毂电机和dbs液压制动器工作。
81.在本实施例中,关于车身骨架、激光雷达、双目相机、转向电机控制器、轮毂电机、轮毂电机控制器、陀螺仪、导航系统、dbs液压制动器、dbs控制器和电源模块之间的位置关系,本文不进行具体限定,具体生产生活中可以根据实际情况进行设置。
82.工控机通过导航系统、激光雷达、双目相机、陀螺仪监测外部数据信息,根据信息变化和预设的处理策略发出相应的指令,并通过vcu将指令转化为相应的具体指令发送至相应的转向电机控制器、轮毂电机控制器和dbs控制器连接中,并通过转向电机控制器、轮毂电机控制器和dbs控制器连接分别驱动主动转向装置、轮毂电机和dbs液压制动器工作,达到无人驾驶的目的。
83.具体的,在控制主动转向装置时,主要为控制转向执行器360,具体原理可参考上文。
84.具体的,vcu(vehicle control unit)整车控制器作为新能源车中央控制单元,是整个控制系统的核心。
85.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。