1.本技术涉及环卫作业装备领域,特别地,涉及一种多功能环卫作业装备。
背景技术:
2.城市的主干道相当于人体的主脉血管,小街小巷则相当于人体的毛细血管,目前已有小型环卫作业装备应用于人行道、辅道、背街小巷、公园景区、校园、工业园区、广场、商业区、生活社区等,一定程度上解决了小型设备替代人的效果,但是从目前已面市的产品来看,已有的小型环卫作业装备普遍采用的是单一功能设计的方式,实际应用的场景有限且功能单一,不能实现“一机多用”,使其有效利用时间大大降低。同时该类装备普遍采用燃油动力以及液压气动工作装置,在作业的过程中产生较大的噪音以及大气污染物的排放。
3.另外,目前小型环卫装备通常要与人进行协同作业,手持式作业设备普遍采用的是燃油动力和纯电动力,燃油动力一般比较笨重以及不好携带,也产生噪音和大气污染;纯电动力产品续航能力较低,不能随时进行补电,导致产品的有效作业时间大大降低,不能进行正常作业工况下的协同作业,人机配合的协同性较差。
技术实现要素:
4.本技术提供了一种多功能环卫作业装备,以解决现有的环卫作业装备功能较为单一、作业效率低、人机配合的协同性较差的技术问题。
5.本技术采用的技术方案如下:
6.一种多功能环卫作业装备,包括设置有移动电源的电动车辆主机,还包括:
7.转换装置,活动设置在所述电动车辆主机的前端;
8.作业功能头,根据作业场景的需要可更换地连接设置在所述转换装置上;
9.供电插座,设置在所述电动车辆主机上,与所述移动电源电路连接,用于输出相应的标准电压;
10.安装接口,设置在所述电动车辆主机上,所述安装接口上根据作业场景的需要可更换地连接设置有相应的容器上装。
11.进一步地,所述转换装置包括:
12.安装座,铰接设置在所述电动车辆主机的前端,采用插销式连接结构与作业功能头相连接;
13.管线快插接头,包括清水管路接头、污水管路接头、液压管路接头、电源线接头、气压管路接头,用于实现电动车辆主机与作业功能头的管线快速断开与连接。
14.进一步地,所述作业功能头包括可拆卸电动扫盘、可拆卸草坪修剪单元、可拆卸绿篱修剪单元、可拆卸高压喷水单元。
15.进一步地,所述可拆卸绿篱修剪单元的末端安装设置有修剪头,所述修剪头包括可拆卸水平和竖直修剪头、球形修剪头、圆柱形修剪头。
16.进一步地,所述可拆卸高压喷水单元包括可拆卸高压清洗作业单元,所述可拆卸
高压清洗作业单元的前侧安装设置有用于向地面喷水的可拆卸排喷单元,所述可拆卸高压清洗作业单元还设置有输出高压水的水管快速接头。
17.进一步地,还包括:外置接口,设置在所述电动车辆主机上,用于挂载相应的手持式作业设备。
18.进一步地,所述手持式作业设备包括手持式电动作业设备、手持式人力作业设备,所述手持式电动作业设备包括手持式电动割草机、手持式电动链锯、手持式电动修枝机、手持式电动吹风筒、手持式电动吸尘器、手持式高压冲洗水枪、手持式水磨抛光单元、手持式地面清扫刷,所述手持式人力作业设备包括扫把、撮箕、夹子、绿篱剪。
19.进一步地,所述外置接口和安装接口均通过快速卡扣与手持式作业设备或容器上装进行连接或脱离。
20.进一步地,所述容器上装包括置物架、可拆卸垃圾箱、可拆卸水箱。
21.进一步地,所述电动车辆主机上还设置有带防水的标准可拆卸电池充电模块,用于为手持式电动作业设备的电池进行充电。
22.进一步地,所述电动车辆主机还设置有无人驾驶模块和/或远程操控模块,用于控制电动车辆主机按预定的作业路径进行人机协同作业。
23.相比现有技术,本技术具有以下有益效果:
24.本技术提供的多功能环卫作业装备,包括设置有移动电源的电动车辆主机,还包括活动设置在所述电动车辆主机的前端转换装置、根据作业场景的需要可更换地连接设置在所述转换装置上的作业功能头、用于输出相应的标准电压的供电插座、用于挂载相应的手持式作业设备的外置接口、安装接口,所述安装接口上根据作业场景的需要可更换地连接设置有相应的容器上装。本技术可根据作业场景快速切换作业功能头及其配套的手持式作业设备和容器上装,适用于多个作业场景,提高设备利用率,降低作业成本,能够同时发挥出装备的高效率和人工的精细化作业优势,实现人机高效协同作业和“一机多用”。同时,本技术采用模块化设计,便于拆卸、维护和更换,延长产品的使用寿命,达到低碳环保的要求;另外,本技术由于采用纯电动能源作为行驶动力和作业装置动力,低噪音和零尾气排放;最后,本技术可搭载多种电动和非电动的手持式作业设备,同时具备供电功能,可大幅延长手持式电动作业设备的作业时间,进一步促进人机高效协同作业。
25.除了上面所描述的目的、特征和优点之外,本技术还有其它的目的、特征和优点。下面将参照附图,对本技术作进一步详细的说明。
附图说明
26.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
27.图1是本技术优选实施例的多功能环卫作业装备的结构示意图(不含功能头和手持式作业设备)。
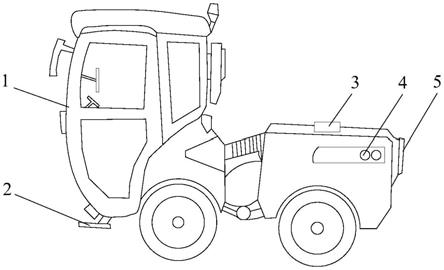
28.图2是本技术另一优选实施例的多功能环卫作业装备的结构示意图(不含功能头和手持式作业设备)。
29.图3是本技术另一优选实施例的多功能环卫作业装备在草坪修剪作业场景下搭载功能头和手持式作业设备时的结构示意图。
30.图4是本技术优选实施例的多功能环卫作业装备在草坪修剪作业场景下的作业过程示意图。
31.图5是本技术另一优选实施例的多功能环卫作业装备在绿篱修剪作业场景下搭载功能头和手持式作业设备时的结构示意图。
32.图6是本技术优选实施例的球形修剪头结构示意图。
33.图7是本技术优选实施例的圆柱形修剪头结构示意图。
34.图8是本技术优选实施例的遥控器示意图。
35.图9是本技术优选实施例的多功能环卫作业装备在绿篱修剪作业场景下的作业过程示意图。
36.图10是本技术另一优选实施例的多功能环卫作业装备在普扫作业场景下搭载功能头和手持式作业设备时的结构示意图。
37.图11是本技术优优选实施例的手持式电动吹风筒结构示意图。
38.图12是本技术优优选实施例的手持式电动吸尘器外挂示意图。
39.图13是本技术优选实施例的供电插座结构示意图。
40.图14是本技术优选实施例的多功能环卫作业装备在普扫作业场景下的作业过程示意图。
41.图15是本技术另一优选实施例的多功能环卫作业装备在深度保洁作业场景下搭载功能头和手持式作业设备时的结构示意图。
42.图16是本技术优选实施例在深度保洁作业场景下的作业过程示意图。
43.图17是本技术优选实施例在深度保洁作业场景下搭载的手持式水磨抛光单元。
44.图18是本技术优选实施例深度保洁作业场景下搭载的手持式地面清扫刷示意图。
45.图中所示为:
46.1、电动车辆主机;2、转换装置;3、安装接口;4、供电插座;5、外置接口;6、可拆卸电动扫盘;7、可拆卸草坪修剪单元;8、第一置物架;9、手持式电动割草机;10、可拆卸水平和竖直修剪头;11、可拆卸绿篱修剪单元;12、第二置物架;13、手持式电动链锯;14、球形修剪头;15、圆柱形修剪头;16、遥控器;17、可拆卸垃圾箱;18、手持式电动吹风筒;19、插头;20、手持式电动吸尘器;21、可拆卸高压清洗作业单元;22、水管快速接头;23、可拆卸排喷单元;24、可拆卸水箱;25、手持式高压冲洗水枪;26、手持式水磨抛光单元;27、手持式地面清扫刷;28、标准可拆卸电池充电模块;29、盖板。
具体实施方式
47.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
48.参照图1,本技术的优选实施例提供了一种多功能环卫作业装备,包括设置有以高密度锂电池为移动电源的电动车辆主机1、转换装置2、作业功能头、供电插座4、外置接口5、安装接口3,其中:
49.所述转换装置2活动设置在所述电动车辆主机1的前端;
50.所述作业功能头根据作业场景的需要可更换地连接设置在所述转换装置2上;
51.所述供电插座4设置在所述电动车辆主机1的后部,与所述移动电源电路连接,用
于输出相应的标准电压;
52.所述外置接口5设置在所述电动车辆主机1的后部,用于挂载相应的手持式作业设备;
53.所述安装接口3设置在所述电动车辆主机1的后部,所述安装接口3上根据作业场景的需要可更换地连接设置有相应的容器上装。
54.本实施例提供的多功能环卫作业装备包括设置有移动电源的电动车辆主机1、活动设置在所述电动车辆主机1前端转换装置、根据作业场景的需要可更换地连接设置在所述转换装置上的作业功能头、用于输出相应的标准电压的供电插座4、用于挂载相应的手持式作业设备的外置接口5、安装接口3,所述安装接口3上根据作业场景的需要可更换地连接设置有相应的容器上装。本实施例可根据作业场景快速切换不同的作业功能头及其配套的手持式作业设备和容器上装,适用于多个作业场景,大幅提高设备利用率,降低作业成本,能够同时发挥出装备的高效率和人工的精细化作业优势,实现人机高效协同作业和“一机多用”。同时,本实施例采用模块化设计,便于拆卸、维护和更换,延长产品的使用寿命,达到低碳环保的要求;另外,本实施例由于采用纯电动能源作为行驶动力和作业装置动力,低噪音和零尾气排放;最后,本实施例可搭载多种手持式电动和非电动作业设备,手持式电动作业采用标准电池模块,标准可拆卸电池充电模块28可同时为多个电池充电,手持式电动作业设备通过换电池的方式进行补电,可大幅延长手持式电动作业设备的作业时间,进一步促进人机高效协同作业。
55.具体地,上述实施例中所述转换装置2包括安装座、管线快插接头,其中:
56.所述安装座铰接设置在所述电动车辆主机1的前端,采用插销式连接结构与作业功能头相连接;
57.所述管线快插接头包括清水管路接头、污水管路接头、液压管路接头、电源线接头、气压管路接头,用于实现电动车辆主机1与作业功能头的管线快速断开与连接。
58.本实施例中,安装座为三角形或矩形,铰接设置在所述电动车辆主机1的前端,并采用插销式连接结构与作业功能头相连接,整个连接过程只需一人即可操作,快捷方便。安装座铰接设置在所述电动车辆主机1的前端,可通过液压缸或气压缸调节安装座的俯仰角,方便控制作业功能头的作业姿态,同时,本实施例的各个管线快插接头可方便的实现各种管路和电路的连接,从而为作业功能头提供必要的气压动力、液压动力、作业水体和电源动力,保证作业功能头的正常运行。
59.具体地,上述实施例中所述作业功能头包括可拆卸电动扫盘6、可拆卸草坪修剪单元7、可拆卸绿篱修剪单元11、可拆卸高压喷水单元。本实施例包括多种常用的作业功能头,如用于清扫路面的可拆卸电动扫盘6、用于修剪草坪的可拆卸草坪修剪单元7、用于修剪树木的可拆卸绿篱修剪单元11、用于进行深度清洁作业的可拆卸高压喷水单元,极大的扩大的环卫作业装备的作业类型。这里仅列举了常用的几种作业功能头,其他未列举的作业功能头同样可以根据实际作业需要应用于本技术中,如用于对环境进行消毒的消毒作业单元、用于为树木喷扫杀虫剂的除虫作业单元等,在此不再一一列举。
60.具体地,上述实施例中所述可拆卸绿篱修剪单元11的末端安装设置有修剪头,所述修剪头包括可拆卸水平和竖直修剪头10(见图5)、球形修剪头14(见图6)、圆柱形修剪头15(见图7)。本实施例的可拆卸绿篱修剪单元11的末端可安装设置多种修剪头,可满足不同
的绿篱修剪作业对形状的需求。
61.具体地,如图15所示,上述实施例中所述可拆卸高压喷水单元包括可拆卸高压清洗作业单元21,由设置在电动车辆主机1内部的高压水泵供水,所述可拆卸高压清洗作业单元21的前侧安装设置有用于向地面喷水的可拆卸排喷单元23,所述可拆卸排喷单元23并排设置有多个喷杆组件或喷头组件,以均匀向地面进行喷水冲洗作业;所述可拆卸高压清洗作业单元21还设置有输出高压水的水管快速接头22。本实施例的可拆卸高压喷水单元由可拆卸高压清洗作业单元21提供高压水,高压水一方面可通过可拆卸排喷单元23对环卫作业装置行走所经的地面进行高效冲洗,同时,还设置有输出高压水的水管快速接头22,方便通过管路连接手持式高压冲洗水枪25,从而方便对高处或其他可拆卸排喷单元23无法冲洗的区域进行冲洗作业,扩大冲洗的范围,防止出现作业死角(如图16所示)。
62.具体地,上述实施例中所述手持式作业设备包括手持式电动作业设备、手持式人力作业设备,所述手持式电动作业设备包括手持式电动割草机9、手持式电动链锯13、手持式电动修枝机、手持式电动吹风筒18(见图11)、手持式电动吸尘器20(见图12)、手持式高压冲洗水枪25、手持式水磨抛光单元26(见图17)、手持式地面清扫刷27(见图18),所述手持式人力作业设备包括扫把、撮箕、夹子、绿篱剪等。
63.具体地,所述外置接口5和安装接口3均通过快速卡扣与手持式作业设备或容器上装进行连接或脱离,结构简单,操作便捷。
64.具体地,所述容器上装包括置物架、可拆卸垃圾箱17、可拆卸水箱24,所示置物架可用于放置各种作业工具,所述可拆卸垃圾箱17可用于临时存放清扫的垃圾,而可拆卸水箱24可以存放用于冲洗作业的清水或收集清洗作业后的污水。
65.具体地,所述电动车辆主机1的后部还设置有四个带防水效果的标准可拆卸电池充电模块28,所述标准可拆卸电池充电模块28通过相应电路与锂电池电连接,用于为手持式电动作业设备的电池进行充电,上述标准可拆卸电池充电模块28可以为手持式电动作业设备提供标准化可拆卸电池,手持式电动作业设备包括带可拆卸电池的手持式电动割草机9、手持式电动链锯13、手持式电动修枝机、手持式电动吹风筒18、手持式电动吸尘器20,另外,本实施例还包括有手持式水磨抛光单元26、手持式地面清扫刷27,由于手持式水磨抛光单元26、手持式地面清扫刷27的作业功率较大,不由标准电池供电,而是用电源线连接供电插座4。本实施例可大幅延长手持式电动作业设备的续航时间,进一步促进人机高效协同作业,其中,所述标准可拆卸电池充电模块28可单独设置在所述电动车辆主机1的后部,亦可与所述外置接口5集成设置(见图12)。
66.具体地,所述电动车辆主机1还设置有无人驾驶模块和/或远程操控模块,用于控制电动车辆主机1按预定的作业路径进行人机协同作业,如无人驾驶模块控制电动车辆主机1按预定的作业路径进行作业,所述远程操控模块采用5g远程操控模块,可通过相应的遥控器16(见图8)控制电动车辆主机1按指定的作业路径进行作业,减少现场作业人员数量,提高作业的智能化程度和便捷性,尤其对于一些对人体有害的作业场景,如消毒作业、杀虫作业等,利用无人驾驶模块和/或5g远程操控模块可有效避免对作业人员的个人健康造成伤害。
67.如图13所示,所示供电插座4为带防水盖装置的斜向下45度的通用性外接电源插座,与外接作业装置的插头19相适配,该供电插座4拥有多种电压输出规格,可为不同型号
的外接作业装置提供电源,输出电压类型包括220v和48v等,电动车辆主机1可作为移动式的电源使用,可外接电驱动的工作装置或对其他小型电动车辆/设备提供临时应急充电。另外,如图2所示,所述电动车辆主机1的后端还设置有可翻开的盖板29,方便对电动车辆主机1后端的内设部件进行安装和维护。事实上,由于所示电动车辆主机1内部集成多个功能模块,比如电池、风机、高压水泵、电压逆变器等,因此电动车辆主机1采用可拆卸式的车身外壳,便于内部设备的维护保养。
68.下面结合几种常见的作业场景对本技术做进一步的说明。
69.1、草坪修剪作业场景
70.如图3所示,在草坪修剪作业场景下,电动车辆主机1的前端连接设置有可拆卸草坪修剪单元7,后端搭载有手持式电动割草机9和第一置物架8。如图4所示,在电动车辆主机1到达作业现场后,电动车辆主机1可通过人工驾驶方式、无人驾驶方式或远程遥控方式沿预设作业路线进行草坪修剪作业,而对于一些电动车辆主机1不便到达的区域,则由作业人员从电动车辆主机1取下手持式电动割草机9进行人工草坪修剪作业,从而通过人机协同作业,确保草坪修剪作业高效无死角。
71.2、绿篱修剪作业场景
72.如图5所示,在绿篱修剪作业场景下,电动车辆主机1的前端连接设置有可拆卸绿篱修剪单元11,所示可拆卸绿篱修剪单元11前端可选地连接设置可拆卸水平和竖直修剪头10、球形修剪头14或圆柱形修剪头15,后端搭载有手持式电动链锯13、手持式电动修枝机和第二置物架12。如图9所示,在电动车辆主机1到达作业现场后,电动车辆主机1可通过人工驾驶方式、无人驾驶方式、远程遥控方式沿预设作业路线进行绿篱修剪作业,而对于一些电动车辆主机1不便到达的区域,则由作业人员从电动车辆主机1取下手持式电动链锯13对树木进行人工绿篱修剪作业,从而通过人机协同作业,确保绿篱修剪作业高效无死角。
73.3、普通清扫作业场景
74.如图10所示,在普通清扫作业场景下,电动车辆主机1的前端连接设置有带有吸嘴的可拆卸电动扫盘6,后端搭载有可拆卸垃圾箱17、手持式电动吹风筒18、手持式电动吸尘器20等。如图14所示,在电动车辆主机1到达作业现场后,电动车辆主机1可通过人工驾驶方式、无人驾驶方式、远程遥控方式沿预设作业路线进行普通清扫作业,清扫的垃圾被吸入可拆卸垃圾箱17内,而对于一些电动车辆主机1不便到达的区域,则由作业人员从电动车辆主机1取下手持式电动吹风筒18或手持式电动吸尘器20将垃圾清理到电动车辆主机1的预定作业轨迹上,接着再由电动车辆主机1上的可拆卸电动扫盘6对垃圾进行清扫并吸入到可拆卸垃圾箱17内进行收集和运输等,从而通过人机协同作业,确保普通清扫作业高效无死角。
75.4、深度保洁作业场景
76.如图15所示,在深度保洁作业场景下,电动车辆主机1的前端连接设置有可拆卸高压清洗作业单元21、可拆卸排喷单元23,后端搭载有可拆卸水箱24、手持式高压冲洗水枪25、手持式水磨抛光单元26、手持式地面清扫刷27等,可拆卸高压清洗作业单元21由可拆卸水箱24供水,手持式高压冲洗水枪25可通过水管与水管快速接头22相连接。如图16所示,在电动车辆主机1到达作业现场后,电动车辆主机1可通过人工驾驶方式、无人驾驶方式、远程遥控方式沿预设作业路线进行深度保洁作业,而对于一些电动车辆主机1不便到达的区域,如高于地面的位置等,则由作业人员从电动车辆主机1取下手持式高压冲洗水枪25与水管
快速接头22相连接,人工对相应区域进行高压冲洗。可拆卸水箱24还包括相互隔离的清水腔和污水腔,高压冲洗后的污水可以吸入污水腔内进行收集和运输等,防止二次污染,对于一些有更高作业需求的区域,可通过手持式水磨抛光单元26、手持式地面清扫刷27进行更进一步的保洁作业,从而通过人机协同作业,确保普通清扫作业高效无死角。
77.综上所述,上述实施例提供的多功能环卫作业装备具有如下特点:
78.1、本技术可用于多场景下的环卫装备与人工协同的作业,能够同时发挥出装备的高效率和人工的精细化作业优势,实现人机高效协同作业和“一机多用”。
79.2、本技术采用功能模块化设计,便于拆卸、维护、更换,延长产品的使用寿命,达到低碳环保的要求。
80.3、本技术可实现多功能快速转换,适用于多个作业场景,提高设备利用率,降低作业成本;
81.4、本技术采用纯电动能源作为行驶动力和作业装置动力,可实现低噪音和零尾气排放。
82.5、本技术可搭载各类手持式作业设备,同时具备充电和换电池功能,延长手持式设备的作业时间,实现人机高效率组合作业。
83.6、本技术可搭载无人驾驶模块和/或远程操控模块,实现单人与设备高效协同组合作业,降低人工作业强度和部分替代人工。
84.以上所述仅为本实施例的优选实施例而已,并不用于限制本实施例,对于本领域的技术人员来说,本实施例可以有各种更改和变化。凡在本实施例的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实施例的保护范围之内。