1.本实用新型涉及半挂车技术领域,具体的,涉及车辆重心偏移预警系统。
背景技术:
2.自卸式半挂车适用于煤炭、矿石、建筑物料等散装零散货物的运输。车厢采用侧翻和后翻自卸方式,可有效地装卸机运输散装零散货物。后卸式自卸车长久以来,在卸载货物时,由于驾驶员需要在驾驶室操作完成车厢的举升回落工况,使得驾驶员不能观察车辆整体的平衡状况,从而发生了很多车辆侧倾翻事故。
3.针对这一情况,有必要研究出一种能够实时监控半挂车平衡状况并且能及时为司机提醒警示的系统。
技术实现要素:
4.本实用新型提出车辆重心偏移预警系统,通过对半挂车水平偏移的检测,报警显示以及偏移超出危险范围使举升油缸自动回落,解决了半挂车在卸载货物时,由于司机无法得知举升回落工况,从而容易导致车辆侧倾翻事故的问题。
5.本实用新型的技术方案如下:
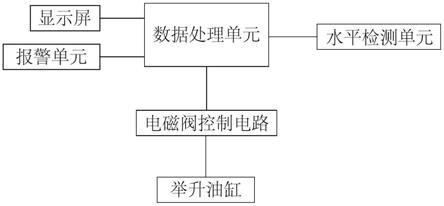
6.车辆重心偏移预警系统,包括数据处理单元、显示屏、水平检测单元、电磁阀控制电路和报警单元,所述水平检测单元、显示屏、电磁阀控制电路和报警单元均连接所述数据处理单元,所述水平检测单元设置在车架中轴上,所述显示屏和报警单元均设置在驾驶室仪表台内,所述数据处理单元设置在半挂车车架处,所述电磁阀控制电路用于控制举升油缸。
7.进一步,所述水平检测单元包括角度传感器u1和放大器u2,所述角度传感器u1的时钟输入端和数据输入端连接所述数据处理单元,所述角度传感器u1的out1输出端连接所述放大器u2的同相输入端,所述角度传感器u1的out2输出端连接所述放大器u2的反相输入端,所述放大器u2的输出端作为所述水平检测单元的输出端连接所述数据处理单元。
8.进一步,所述报警单元包括三极管q3、三极管q4和蜂鸣器buzzer1,所述三极管q3的基极通过电阻r10连接所述数据处理单元,所述三极管q3的发射极接地,所述三极管q3的集电极依次通过电阻r12、r11后连接+9v电压源,所述电阻r11和电阻r12的连接点连接所述三极管q4的基极,所述三极管q4的发射极连接+9v电压源,所述三极管q4的集电极连接蜂鸣器buzzer1的正极,所述蜂鸣器buzzer1的负极接地。
9.进一步,所述电磁阀控制电路包括pwm转换电路和功率放大电路,所述pwm转换电路的输入端连接数据处理单元,所述pwm转换电路的输出端连接功率放大电路的输入端,所述功率放大电路包括运放u5、三极管q1和三极管q2,所述运放u5的反相输入端作为功率放大电路的输入端,所述运放u5的输出端通过电阻r4连接三极管q1的基极和三极管q2的基极,所述三极管q1的发射极连接三极管q2的发射极,所述三极管q1的集电极连接+15v电压源,所述三极管q2的集电极连接-15v电压源,所述运放u5的反相输入端连接电磁阀线圈yv
的一端,电磁阀线圈yv的另一端连接所述三极管q2的发射极,所述三极管q2的发射极通过电阻r14接地。
10.所述pwm转换电路包括运放u3,所述运放u3的反相输入端作为pwm转换电路的输入端连接所述数据处理单元,电阻r8和电阻r9串联在5v电压源和地之间,所述运放u3的同相输入端连接电阻r8和电阻r9的连接点,所述运放u3的输出端作为pwm转换电路的输出端。
11.进一步,所述电磁阀控制电路还包括模拟开关u4,所述模拟开关u4的输入端连接所述运放u3的输出端,所述模拟开关u4的输出端通过电阻r3连接所述运放u5的反相输入端,所述模拟开关u4的控制引脚连接所述数据处理单元。
12.本实用新型的工作原理及有益效果为:
13.通过在车架中轴上设置水平检测单元,用来实时监测半挂车的左右偏移情况,通过数据处理单元后在显示屏进行半挂车偏移状况实时显示,司机在驾驶室操纵半挂车卸货时也能直观的了解到车体是否发生偏移。当偏移量超出预设值时,通过数据处理单元启动报警单元,及时提醒司机,并通过电磁阀控制电路自动控制举升油缸降落,降低车辆重心。避免了半挂车卸货时车辆侧倾翻事故的发生,提高了半挂车卸货工作的安全性。
14.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
附图说明
15.图1为本实用新型的原理框图;
16.图2为本实用新型水平检测单元的电路图;
17.图3为本实用新型报警单元的电路图;
18.图4为本实用新型电磁阀控制电路的电路图。
具体实施方式
19.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本实用新型保护的范围。
20.实施例1
21.如图1所示,本实施例提出了车辆重心偏移预警系统,
22.包括数据处理单元、显示屏、水平检测单元、电磁阀控制电路和报警单元,所述水平检测单元、显示屏、电磁阀控制电路和报警单元均连接所述数据处理单元,所述水平检测单元设置在车架中轴上,所述显示屏和报警单元均设置在驾驶室仪表台内,所述数据处理单元设置在半挂车车架处,所述电磁阀控制电路用于控制举升油缸。
23.本实施例中,通过在车架中轴上设置水平检测单元,用来实时监测半挂车的左右偏移情况,通过数据处理单元后在显示屏进行半挂车偏移状况实时显示,司机在驾驶室操纵半挂车卸货时也能直观的了解到车体是否发生偏移。当偏移量超出预设值时,通过数据处理单元启动报警单元,及时提醒司机,并通过电磁阀控制电路自动控制举升油缸降落,降低车辆重心。避免了半挂车卸货时车辆侧倾翻事故的发生,提高了半挂车卸货工作的安全性。
24.进一步,如图2所示,
25.基于与上述实施例1相同的构思,本实施例还提出了水平检测单元的具体电路连接,包括角度传感器u1和放大器u2,所述角度传感器u1的时钟输入端和数据输入端连接所述数据处理单元,所述角度传感器u1的out1输出端连接所述放大器u2的同相输入端,所述角度传感器u1的out2输出端连接所述放大器u2的反相输入端,所述放大器u2的输出端作为所述水平检测单元的输出端连接所述数据处理单元。
26.本实施例中,角度传感器u1的型号为sca103t,用于半挂车左右轴向偏移角度的测量,采用单极+5v供电,工作温度范围宽,低功耗,低成本。可以两路模拟0-5v电压输出,实现信号的采集与传输。角度传感器u1的两路输出out1和out2输出的电压范围分别为0-5v和5-0v,连接放大器u2的同相输入和反相输入。放大器u2型号为ina114,尺寸小、精度高、价格低廉,广泛用于电桥、数据采集等,具有失调电压低,漂移小,共模抑制比高等优点。通过放大器u2将角度传感器u1的两路输出整流成单路输出,其输出范围变为-5v至+5v,发送给数据处理单元。通过角度传感器u1与放大器u2结合使用,可以抵消误差,抑制温漂,获得稳定的电压增益。数据处理单元将接收到的电压信号经模数转换和内部处理后,得到半挂车当前水平偏移量在显示屏进行显示,司机在驾驶室内可以直观的了解半挂车整体稳定情况,提高卸车的安全性。
27.进一步,如图3所示,
28.基于与上述实施例1相同的构思,本实施例还提出了报警单元的具体电路连接,包括三极管q3、三极管q4和蜂鸣器buzzer1,所述三极管q3的基极通过电阻r10连接所述数据处理单元,所述三极管q3的发射极接地,所述三极管q3的集电极依次通过电阻r12、r11后连接+9v电压源,所述电阻r11和电阻r12的连接点连接所述三极管q4的基极,所述三极管q4的发射极连接+9v电压源,所述三极管q4的集电极连接蜂鸣器buzzer1的正极,所述蜂鸣器buzzer1的负极接地。
29.本实施例中,三极管q3为npn型三极管,起开关作用。一般情况下,三极管q3处于断开状态,蜂鸣器buzzer1不发声;当数据处理单元判断半挂车偏移量超出预设值时,通过电阻r10给三极管q3的基极高电平信号,三极管q3导通,驱动q4导通,蜂鸣器buzzer1发声报警。三极管q4为pnp型三极管,连接到蜂鸣器buzzer1的正极进一步驱动蜂鸣器的工作。
30.进一步,如图4所示,
31.基于与上述实施例1相同的构思,本实施例还提出了电磁阀控制电路的具体电路连接,包括pwm转换电路和功率放大电路,所述pwm转换电路的输入端连接数据处理单元,所述pwm转换电路的输出端连接功率放大电路的输入端,所述功率放大电路包括运放u5、三极管q1和三极管q2,所述运放u5的反相输入端作为功率放大电路的输入端,所述运放u5的输出端通过电阻r4连接三极管q1的基极和三极管q2的基极,所述三极管q1的发射极连接三极管q2的发射极,所述三极管q1的集电极连接+15v电压源,所述三极管q2的集电极连接-15v电压源,所述运放u5的反相输入端连接电磁阀线圈yv的一端,电磁阀线圈yv的另一端连接所述三极管q2的发射极,所述三极管q2的发射极通过电阻r14接地。
32.所述pwm转换电路包括运放u3,所述运放u3的反相输入端作为pwm转换电路的输入端连接所述数据处理单元,电阻r8和电阻r9串联在5v电压源和地之间,所述运放u3的同相输入端连接电阻r8和电阻r9的连接点,所述运放u3的输出端作为pwm转换电路的输出端。
33.在本实施例中,pwm转换电路接收数据处理单元运算输出的pwm脉冲信号,经过运放u3高速运算放大器,将输入pwm信号与同相输入端的门限电压进行比较,pwm信号为高时,运放正饱和输出,pwm信号为低时,运放负饱和输出,最终将pwm脉冲信号转换成
±
15v的电压信号。功率放大电路将pwm转换电路输出的电压信号转化为驱动电磁阀的电流,采用分流负反馈的形式,其中运放u5用于构建反馈放大电路,三极管q1和三极管q2的作用是增加电流驱动能力,当电压信号为正时,电磁阀线圈yv输入反向电流,当电压信号为负时,电磁阀线圈yv输入正向电流,当输入信号悬空时,无电流输入。即通过调节pwm脉冲信号的占空比实现电磁阀的双向运行,当占空比大于50%时,电磁阀反向运行;当占空比小于50%时,电磁阀正向运行;在占空比等于50%时,电磁阀线圈两端的平均电压为零,电磁阀处于停止状态。
34.进一步,如图4所示,
35.所述电磁阀控制电路还包括模拟开关u4,所述模拟开关u4的输入端连接所述运放u3的输出端,所述模拟开关u4的输出端通过电阻r3连接所述运放u5的反相输入端,所述模拟开关u4的控制引脚连接所述数据处理单元。
36.本实施例中,在pwm转换电路与功率放大电路之间还增加了由模拟开关组成的信号选通电路,可以起到防止电磁阀控制电路上电后驱动信号的误动作,以及避免三极管q1和三极管q2直通。在pwm信号正常工作前,通过模拟开关u4阻断通路,当pwm信号正常工作后,通过模拟开关u4开通。
37.在具体使用时,数据处理单元通过水平检测单元的输入信号经过运算处理后,当判断半挂车车体超过预设的偏移量,控制输出pwm信号占空比小于50%,依次经过pwm转换电路、信号选通电路和功率放大电路后控制电磁阀正向运行、断开供油管路,打开回油管路,车厢回落,半挂车重心降低,使倾斜的车辆回到安全角度范围。
38.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。