1.本发明涉及海洋工程勘察船技术领域,特别涉及一种防浪型海洋工程勘察船及防浪方法。
背景技术:
2.海洋工程地质勘察是指为海洋工程建筑目的而进行的地质勘察,为建筑场地的选择和建筑物的结构设计提供可靠的地质资料,以确保海洋工程的安全。
3.目前,公开号为cn111422302的中国专利公开了一种海洋工程勘察船,包括船体,所述船体的顶部固定连接有甲板,所述底板的顶部固定连接有基座,所述基座的左侧设有取样组件。
4.这种海洋工程勘察船虽然避免了样本掺入杂质的问题,进而保证了样本的纯度为后续研究提供可靠的基础,但是在勘察过程中波浪等会造成船体等发生晃动,进而使得基座与海面之间的相对距离改变,导致取样组件获取的样本不是设定深度的样本,从而使得样本的准确性降低。
技术实现要素:
5.本发明的目的是提供一种防浪型海洋工程勘察船及防浪方法,其具有船体受海浪摇晃时自动修正取样组件伸展长度使得取样组件获取设定位置样本的优点。
6.本发明的上述技术目的是通过以下技术方案得以实现的:一种防浪型海洋工程勘察船,包括船体,所述船体上固接有向上折弯的基座,基座远离船体端设有取样组件,取样组件包括绞盘,绞盘上连接有牵引绳,牵引绳另一端连接有取样筒,绞盘上设有动力组件进行转动进而带动取样筒进行竖向移动,基座包括平直段和竖直段; 所述竖直段上设有识别竖直段偏移角度的倾角传感器和获取倾角传感器信号的控制器件,控制器件、倾角传感器、动力组件和外接电源连接,使得牵引绳收拢长度与平直段竖向偏移高度等量;所述平直段上设有横向放置的平衡板,平衡板上设有带动绞盘沿平衡板横向进行移动的滑移装置;滑移装置、控制器件、倾角传感器和外接电源连接,使得绞盘向远离平直段倾斜方向侧移动,且移动的距离与平直段横向偏移距离相同。
7.通过采用上述技术方案,取样筒放置在设定位置取样时能够根据船体的倾斜角度,通过控制器件对取样筒进行横向和竖向的位置修正,进而使得取样筒能够保持在设定位置进行取样,从而使得取样结果准确。
8.进一步设置:所述滑移装置包括用于连接绞盘和平衡板的滑轨,平衡板上设有移动齿条,绞盘上设有滑移电机,滑移电机上连接有移动齿轮,移动齿轮与移动齿条啮合;所述滑移装置还包括固接在平直段上侧的支撑杆,支撑杆与平衡板转动连接;平衡板下侧转动连接有均匀分布在支撑杆横向两侧的调节齿条;调节齿条之间设有随平直段倾斜进行横向滑动的平衡块;所述滑移装置还包括设有通过平衡块横向移动带动两侧调节齿条进行竖向相反移动保持平衡板水平放置的调节机构。
9.通过采用上述技术方案,双侧调节齿条的设置能够对平衡板提供稳定的支撑,使得平衡板精准随调节齿条进行摆动;同时调节机构的设置使得调节齿条完成自动调节,进而使得平衡板永远保持水平放置,从而控制器件控制绞盘水平移动进行修正,从而修正距离与平直段横向偏移的距离相等,使得取样筒横向位置的修正更加的准确。
10.进一步设置:所述调节机构包括在平直段上侧设有横向放置的滑移槽,平衡块在滑移槽内滑动,平衡块横向两侧固接有传递板,传递板另一侧与滑移槽内壁通过复位弹簧连接;所述调节机构还包括设置在调节齿条相邻侧的调节腔,调节腔内转动连接有纵向放置的传递杆,传递杆上设有传递齿轮,传递齿轮穿过调节腔内壁与相邻调节齿条啮合;传递板靠近调节腔侧设有滑移齿条,调节腔内设有通过滑移齿条横向移动带动相邻传递杆进行省力转动的传递组件。
11.通过采用上述技术方案,平衡块能够准确反应平直段倾斜的角度,通过倾斜程度的不同使得平衡块能够对传递板和复位弹簧施加不同大小的力,随倾斜角度增加使得施加的力增加,进而使得传递板能够移动不同的距离,同时通过传递组件能够将平衡块的对传递板施加的压力或拉力转化为传递杆的动力,从而通过对平衡块重量的更换使得本装置能够适用不同尺寸的平衡板,使得本装置的适用范围更广。
12.进一步设置:所述传递组件包括竖向转动连接在调节腔内的传递蜗杆,传递蜗杆上设有中间齿轮,中间齿轮穿过调节腔内壁与相邻滑移齿条啮合,滑移齿条与滑移槽滑动连接; 所述传递组件还包括传递杆上设有传递蜗轮,传递蜗轮与传递蜗杆啮合。
13.通过采用上述技术方案,使得调节齿条只能够随传递蜗杆进行移动,进而使得平衡板重量的大小不会对调节齿条造成影响,使得调节齿条移动的精准性更高,从而平衡板的水平准确度更高。
14.进一步设置:所述平衡块长度为滑移槽长度的二分之一。
15.通过采用上述技术方案,使得平衡块能够识别船体向两侧倾斜的角度范围相同。
16.进一步设置:所述绞盘包括外壳和绕线盘,绕线盘与外壳转动连接。
17.所述动力组件包括设置在外壳内的动力电机,动力电机输出端连接有动力主齿轮,外壳内设有动力从齿轮,动力从齿轮与绕线盘连接,动力从齿轮和动力主齿轮啮合,动力主齿轮直径小于动力从齿轮。
18.通过采用上述技术方案,使得动力电机的功率要求更低,降低能源损耗,同时动力主齿轮直径小于动力从齿轮能够降低控制器件控制动力电机产生的误差,使得取样筒竖向移动距离精准度更高。
19.进一步设置:所述取样筒横向两侧呈锥形。
20.通过采用上述技术方案,较少海浪与取样筒之间的接触面积,从而减少海浪对取样筒的影响。
21.一种防浪型海洋工程勘察船的防浪方法,包括。
22.s1、准备阶段。
23.s101、通过控制器件控制动力电机放置取样筒至设定位置。
24.s2、取样阶段:s201、倾角传感器获取竖直段倾斜的相对倾角α,控制器件获取竖直段顶端至船体底部的相对高度h和相对倾角α;
s202、控制器件根据设定公式一计算得到平直段竖向偏移高度h;控制器件根据设定公式二计算得到平直段横向偏移距离l;s203、a:控制器件控制绞盘转动收拢牵引绳长度h;b:控制器件控制动力电机转动带动绞盘向远离平直段倾斜侧移动距离l;s204、取样筒取样;s3、回收阶段;s301、通过控制器件控制动力电机回收取样筒至初始位置。
25.通过采用上述技术方案,能够对取样桶现有位置和设定位置之间的竖向距离和横向距离进行准确计算,从而使得取样筒能够准确进行修正复位。
26.进一步设置:所述公式一为h=h-h*cosα;公式二为l=h*sinα。
27.通过采用上述技术方案,公式简单且有效进而加快控制器件的运行速率,使得取样筒能够快速进行修正。
附图说明
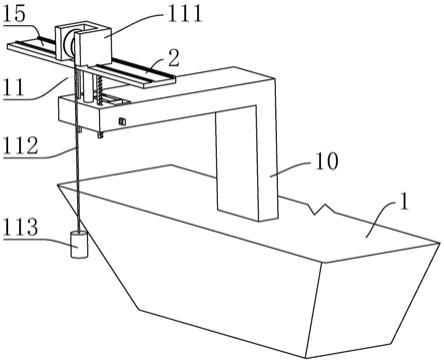
28.图1是第一种优选实施方式下的俯视结构示意图;图2是图1中基座的正视结构示意图;图3是图2中剖面线a-a的结构示意图;图4是图2中剖面线b-b的结构示意图;图5是图2中剖面线c-c的结构示意图。
29.图中,1、船体;10、基座;11、取样组件;111、绞盘;112、牵引绳;113、取样筒;12、动力组件;101、平直段;102、竖直段;13、倾角传感器;14、控制器件;15、平衡板;2、滑移装置;21、滑轨;22、移动齿条;23、滑移电机;24、移动齿轮;25、支撑杆;26、调节齿条;27、平衡块;28、调节机构;281、滑移槽;282、传递板;283、复位弹簧;284、调节腔;285、传递杆;286、传递齿轮;287、滑移齿条;29、传递组件;291、传递蜗杆;292、中间齿轮;293、传递蜗轮;114、外壳;115、绕线盘;121、动力电机;122、动力主齿轮;123、动力从齿轮。
具体实施方式
30.以下结合附图对本发明作进一步详细说明。
31.第一种优选实施方式:一种防浪型海洋工程勘察船,如图1、图2和图3所示,包括船体1,船体1前侧甲板上固接有向上折弯的基座10,基座10包括平直段101和竖直段102,在本实施例中平直段101垂直于竖直段102顶端;基座10远离船体1端设有取样组件11,取样组件11位于平直段101远离竖直段102一端的中点,取样组件11包括绞盘111,绞盘111包括外壳114和绕线盘115,绕线盘115与外壳114转动连接,绕线盘115外壁固定连接有牵引绳112,牵引绳112另一端连接有取样筒113,进而通过绕线盘115的转动带动取样筒113进行竖向移动;取样筒113横向两侧呈锥形,取样筒113通过锥形的设置能够减少海浪对取样筒113的冲击力,进而减少取样筒113在水中的浮动。
32.如图3所示,绞盘111上设有动力组件12进行转动进而带动取样筒113进行竖向移动。动力组件12包括设置在外壳114内的动力电机121,动力电机121与外接电源连接;动力
电机121输出端连接有动力主齿轮122,外壳114内设有动力从齿轮123,动力从齿轮123与绕线盘115连接,使得绕线盘115随动力从齿轮123转动,动力从齿轮123和动力主齿轮122啮合,进而使得动力电机121带动绕线盘115进行转抖动;动力主齿轮122直径小于动力从齿轮123,进而使得动力电机121进行省力转动。
33.如图2所示,竖直段102上设有识别竖直段102偏移角度的倾角传感器13和获取倾角传感器13信号的控制器件14,在初始状态时对倾角传感器13进行角度置零,在本实施例中控制器件14为plc控制器;控制器件14、倾角传感器13、动力组件12和外接电源连接,进而船体1发生倾斜时平直段101与海面之间的相对距离减少,控制器件14通过识别倾角传感器13角度,然后控制器件14控制动力电机121转动使得牵引绳112收拢,收拢长度与平直段101竖向偏移高度相同,从而使得取样筒113维持在设定的深度。
34.如图1和图2所示,平直段101远离竖直段102端设有横向放置的平衡板15,平衡板15对称设置在平直段101上侧,绞盘111滑动连接在平衡板15上,平衡板15上设有带动绞盘111沿平衡板15横向进行移动的滑移装置2。滑移装置2包括用于连接绞盘111和平衡板15的滑轨21,沿平衡板15上侧横向设有移动齿条22,绞盘111上设有滑移电机23,滑移电机23连接在外壳114上,滑移电机23上连接有移动齿轮24,移动齿轮24与移动齿条22啮合,进而通过滑移电机23转动带动绞盘111沿平衡板15横向进行移动;平直段101上侧固接有支撑杆25,支撑杆25位于平直段101中轴线上,支撑杆25与平衡板15中心点转动连接,进而使得平衡板15能够绕支撑杆25进行竖向转动;平衡板15下侧转动连接有均匀分布在支撑杆25横向两侧的调节齿条26,调节齿条26与平直段101竖向滑动连接,在船体1竖直状态下时平衡板15同步保持水平,调节齿条26之间设有随平直段101倾斜进行横向滑动的平衡块27。
35.如图3和图4所示,滑移装置2还包括设有通过平衡块27横向移动带动两侧调节齿条26进行竖向相反移动保持平衡板15水平放置的调节机构28。调节机构28包括在平直段101上侧设有横向放置的滑移槽281,滑移槽281中轴线与平直段101中轴线对齐,平衡块27在滑移槽281内滑动,平衡块27长度为滑移槽281长度的二分之一,平衡块27横向两侧固接有传递板282,传递板282另一侧与滑移槽281内壁通过复位弹簧283连接,在初始状态时平衡块27中点与滑移槽281中轴线对齐,进而使得平直段101发生倾斜时传递板282进行同步滑动;调节齿条26相邻侧设有调节腔284,调节腔284位于平直段101内;调节腔284内转动连接有纵向放置的传递杆285,传递杆285上设有传递齿轮286,传递齿轮286穿过调节腔284内壁与相邻调节齿条26啮合,进而通过传递杆285转动带动调节齿条26升降,从而保持平衡板15的水平。
36.如图4和图5所示,传递板282靠近调节腔284侧设有滑移齿条287,调节腔284内设有通过滑移齿条287横向移动带动相邻传递杆285进行省力转动的传递组件29。传递组件29包括竖向转动连接在调节腔284内的传递蜗杆291,传递蜗杆291上设有中间齿轮292,中间齿轮292穿过调节腔284内壁与相邻滑移齿条287啮合,滑移齿条287与滑移槽281滑动连接,进而滑移齿条287带动相邻传递蜗杆291进行转动; 传递杆285上设有传递蜗轮293,传递蜗轮293与传递蜗杆291啮合,通过传递蜗轮293和传递蜗杆291的设置,使得平衡块27向一侧调节齿条26移动时,靠近平衡块27侧调节齿条26向上移动,远离平衡块27调节齿条26向下移动,使得平衡板15保持水平,同时滑移装置2、控制器件14、倾角传感器13和外接电源连接,进而使得绞盘111沿平衡板15向远离平直段101倾斜方向侧移动,通过控制器件14控制
滑移电机23主动,使得绞盘111移动的距离与平直段101横向偏移距离相同,从而使得取样筒113维持在设定的竖向位置。
37.一种防浪型海洋工程勘察船的防浪方法,其特征在于:包括,s1、准备阶段;s101、通过控制器件14控制动力电机121放置取样筒113至设定位置;s2、取样阶段;s201、 倾角传感器13获取竖直段102倾斜的相对倾角α,控制器件14获取竖直段102顶端至船体1底部的相对高度h和相对倾角α;s202、控制器件14根据设定公式一,公式一为h=h-h*cosα计算得到平直段101竖向偏移高度h;控制器件14根据设定公式二,公式二为l=h*sinα计算得到平直段101横向偏移距离l;s203、a:控制器件14控制绞盘111转动收拢牵引绳112长度h;b:控制器件14控制动力电机121转动带动绞盘111向远离平直段101倾斜侧移动距离l;s204、取样筒113取样。
38.s3、回收阶段:s301、通过控制器件14控制动力电机121回收取样筒113至初始位置。
39.上述的实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。