1.本发明涉及机器人研究领域尤其是水下机器人领域,涉及一种可用于改变水下潜航器航向和速度的驱动简单、易于控制、排布方式可自动调节的矢量推进装置。
背景技术:
2.水下无人潜航器在海底勘测与开采、救助打捞等任务中发挥着重要的作用。20世纪60年代,以美国为首的世界各国开始对水下潜航器进行研究,推进装置作为水下潜航器重要的动力部分,控制整个水下潜航器的速度与方向,使得潜航器能在水中快速灵活的运动。大量的尾部推进装置结构(如文献《china’sfirst deep manned submersible,jiaolong》)被研究设计出来,主要包括普通螺旋桨式、导管螺旋桨式、喷水式三种矢量推进类型,由于采用单个矢量推进装置(如文献《水下矢量推进螺旋桨装置设计与研究》)的结构复杂,价格昂贵,制造成本高,并且需要使用浆舵实现多自由度的运动。后来多个矢量推进控制得到迅速发展,一般采用三个或四个矢量推进器,通过推进器不同的排布放置方式实现,利用相互配合的推力实现不同方向的运动(如文献《水下航行器设计及其航迹跟踪控制研究》和《矢量推进式新型水下航行器主体的关键结构研究》),但这一类推进器的水平推力较小,相较于单矢量推进装置,不能实现快速的水平直线运动。因此,现有的研究难以满足既具有高机动灵活性,又能实现快速运动的要求。
技术实现要素:
3.本发明的目的是创新设计一种可变姿态机构,充分利用滑块连杆机构的同步性,借鉴雨伞骨架的打开方式,发明一种控制简单、灵活性高,可根据不同运动模式实现排布方式主动调整的矢量推进装置。
4.本发明的可变姿态的水下矢量推进装置,包括尾部整体结构、位于尾部整体结构内部的直线运动模块、沿圆周方向均匀分布于尾部整体结构外部的多个姿态调整模块和设置于各姿态调整模块与直线运动模块之间的竖直运动模块;所述直线运动模块包括滑块、用于驱动滑块沿尾部整体结构轴线往复直线滑动的丝杠螺母机构和用于驱动丝杠转动的驱动电机;所述竖直运动模块包括弹性连接于所述滑块的弧面滑块;所述滑块滑块一表面与尾部整体结构内表面始终相接触并可相对滑动;所述姿态调整模块包括可转动连接于尾部整体结构并用于固定安装推进器的活动杆和连接于所述活动杆与弧面滑块之间的连杆组;所述活动杆、连杆组和弧面滑块共同形成滑块摇杆机构;
5.进一步,所述尾部整体结构为锥形罩结构,其两端分别通过大固定端盖和小固定端盖封闭;所述丝杠螺母机构的丝杠支承于大固定端盖和小固定端盖之间;所述滑块通过螺纹与所述丝杠配合;
6.进一步,所述滑块表面绕丝杠轴向均匀分布有多个圆柱轴台;所述弧面滑块设有与圆柱轴台的连接孔;所述圆柱轴台外套有用于推动弧面滑块压紧尾部整体结构内表面的弹簧;
7.进一步,所述尾部整体结构的外表面固定有与所述活动杆一一对应的固定杆;所述活动杆一端铰接于固定杆外端;所述连杆组包括固定于弧面滑块的滑动杆和铰接于滑动杆与活动杆之间的连接杆;
8.进一步,所述姿态调整模块和竖直运动模块分别设置有四组。
9.本发明的有益效果:
10.1.本发明中的姿态调整模块采用滑块连杆机构实现多个推进器实现同步运动,协调性能更好,并且使用单电机驱动控制更加简单。
11.2.本发明的可根据实际运动情况主动改变推进器排布,即可实现灵活转向,又可实现快速直线运动,更大的提高了推进器的推力效率。
12.3.本发明设计具有简易性,可根据不同的推进要求和水下潜航器的大小进行定制生产。
附图说明
13.下面结合附图和实施例对本发明作进一步描述。
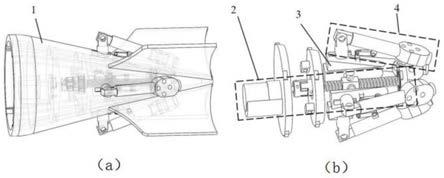
14.图1a为本发明的矢量推进装置的整体结构示意图;
15.图1b为本发明的矢量推进装置的内部结构示意图;
16.图2为本发明的直线运动模块示意图;
17.图3a为本发明的竖直运动模块的截面示意图;
18.图3b为本发明的竖直运动模块的内部示意图;
19.图4a为本发明的姿态调整模块示意图的截面示意图;
20.图4b为本发明的姿态调整模块示意图的内部示意图;
21.图5为本发明的矢量推进装置姿态调整完成示意图。
具体实施方式
22.如图1所示,本实施例的一种可变姿态的水下矢量推进装置,包括尾部整体结构、位于尾部整体结构内部的直线运动模块、沿圆周方向均匀分布于尾部整体结构外部的四个姿态调整模块和四个设置于各姿态调整模块与直线运动模块之间的竖直运动模块;
23.如图2所示,所述直线运动模块2,包括驱动电机2-1、联轴器2-2、大固定端盖2-3、丝杠2-4、滑块2-5、小固定端盖2-6。所述滑块2-5的四个水平面上设有圆柱轴台结构,丝杠2-4两端分别支承在大固定端盖2-3和小固定端盖2-6上,滑块2-5安装在丝杠2-4上,并与丝杠2-4通过螺纹配合,驱动电机2-1通过联轴器2-2固定连接于丝杠2-4,其安装在大固定端盖2-3侧,通过控制驱动电机2-1的转动,经过联轴器2-2带动丝杠2-4进行转动,可以使滑块2-5产生直线运动。
24.所述竖直运动模块3包括弧面滑块3-1和弹簧3-2。如图3所示,弧面滑块3-1下方开设与滑块2-5上的圆柱轴台结构相配合的圆孔,圆柱轴外套弹簧3-2,保证在滑块2-5水平运动时,弧面滑块3-1表面与尾部整体结构1内表面始终相接触;在丝杠滑块向尾部方向进行运动时,圆弧滑块3-1产生竖直方向(尾部整体结构径向)运动,由于弹簧的存在,保证弧面滑块3-1表面始终贴合尾部整体结构内表面,从而实现矢量推进装置内部的良好密封。
25.所述姿态调整模块4包括固定杆4-1、活动杆4-2、连接杆4-3、滑动杆4-4组成。如图
4所示,固定杆4-1与尾部整体结构1相固定,活动杆4-2尾部与固定杆4-1铰接,可以实现绕末端转动,连接杆4-3两端分别铰接活动杆4-2和滑动杆4-4,滑动杆4-4与弧面滑块3-1相互固定,弧面滑块3-1运动时滑动杆4-4推动连接杆4-3转动,从而实现活动杆4-2的抬升;尾部整体结构1外表面应开设有使滑动杆4-4穿过的条形槽,而弧面滑块3-1可始终封堵条形槽确保尾部整体结构1内部的密封性。
26.当矢量推进装置在初始状态时,如图1所示,活动杆4-3末端与尾部整体结构1相贴合,处于收缩状态。当驱动电机2-1带动丝杠2-4转动时,滑块2-5开始向尾部水平运动,此时弧面滑块3-1与尾部整体结构1内表面相贴合并相对滑动,连接连杆4-3绕滑动杆4-4末端转动,从而使活动杆4-2和固定于活动杆4-2的推进器抬升至水平状态,如图5所示,此时的推进器推力完全用于直线运动,大大提高运动效率。本实施例采用滑块摇杆机构作为矢量推进装置变形运动的执行构件,以增加切换不同运动方式的灵活性,通过改变推进器的排布位置,从而克服多矢量推进装置的直线运动时推力不足问题。利用电机带动丝杠滑块运动来实现简单的运动控制。从而实现主动调整推进器排布,保证在不同运动条件下发挥推进器最大效率。
27.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。