1.本实用新型涉及船舶金属表面修复用设备技术领域,具体为一种具有自动纠偏功能的用于金属表面除漆除锈机器人。
背景技术:
2.船舶通常行驶在河流或海面上,由于其自身的使用环境,其表面极容易被锈蚀,如果不及时对金属板体被锈蚀的部位进行有维护,日积月累将造成船体渗漏,从而造成安全事故。在对金属板体锈蚀表面进行维护时,需要将金属板体上的锈和其它区域的漆清理掉。随着科技的发展,已经从最初的依靠维护人员采用砂纸等手持设备对金属板体的锈层和油漆进行抛光打磨的纯人工方式发展为现在的利用高压水清洗的方式。
3.申请公布号为cn111420920a的中国发明专利申请,公开了一种用于金属表面除漆除锈的机器人,该机器人包括行走机车、俯仰臂、清洗盘、安装座、回转组件、悬臂,在行走机车带动机器人行走的过程中,通过清洗盘对船舶表面进行充分快速清洗。在利用该机器人对船舶侧面进行清洗时,通常是沿着船舶的前后向逐层对船舶侧面进行清洗,由于该机器人的行走机构是由两个履带轮进行行走(参加该专利说明书附图1),而两个履带轮分别由不同的驱动机构进行驱动,这就造成在实际运行时,由于两个驱动结构运行会出现不同步,而造成两个履带轮转速不同,最终造成机器人行走路线发生倾斜而偏离当前清洗路线,从而造成船舶侧面漏清洗的情况。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种具有自动纠偏功能的用于金属表面除漆除锈机器人,解决了上述背景技术中提出的问题。
5.一种具有自动纠偏功能的用于金属表面除漆除锈机器人,包括行走机构、俯仰臂、悬臂、清洗盘,所述俯仰臂转动的安装于行走机构上,所述悬臂通过回转组件连接在俯仰臂上,所述清洗盘安装于悬臂的端部,所述悬臂通过第一液压缸驱动,以带动清洗盘上下摆动,所述悬臂与回转组件之间连接有用于检测悬臂上下摆动幅度的位移传感器,所述位移传感器通过信号线连接至控制系统,所述位移传感器将检测的信号反馈至控制系统,所述第一液压缸通过油路连接有安装于俯仰臂上的液压储能器。
6.进一步,所述位移传感器的两端分别交接在悬臂和回转组件上。
7.进一步,所述悬臂以及回转组件上均成对设置有两个竖板,所述位移传感器的两端分别通过铰接轴交接在所述竖板上。
8.进一步,所述控制系统为安装在行走机构的电控箱,所述电控箱内设置有中央处理器,所述中央处理器连接有设置于电控箱上的显示屏,所述位移传感器与所述中央处理器通过信号线相连。
9.进一步,所述中央处理器连接有无线网络模块,所述中央处理器通过无线网络连接有遥控器,通过所述遥控器输入位移传感器检测数据的报警阈值。
10.本实用新型具备以下有益效果:
11.本实用新型在悬臂与回转组件之间连接位移传感器以检测悬臂上下摆动幅度,并将该检测结果反馈至控制系统,通过控制系统判断机器人的行程路线是否发生偏移,以便于控制系统及时调整机器人的行程路线,有效保证机器人除漆除锈工作过程中的稳定性。
附图说明
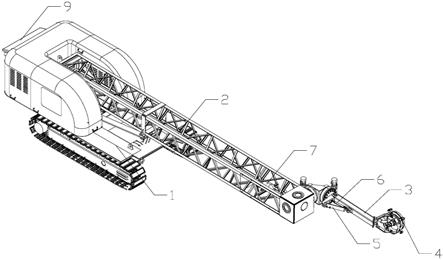
12.图1为本实用新型的立体示意图;
13.图2本实用新型的侧视图;
14.图3为本实用新型的悬臂的俯视图。
15.图中:1、行走机构,2、俯仰臂,3、悬臂,4、清洗盘,5、第一液压缸,6、位移传感器,7、液压储能器,8、竖板,9、电控箱。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
17.请参阅图1-3,一种具有自动纠偏功能的用于金属表面除漆除锈机器人,包括行走机构1、俯仰臂2、悬臂3、清洗盘4,所述俯仰臂2转动的安装于行走机构1上,所述悬臂 3通过回转组件连接在俯仰臂2上,所述清洗盘4安装于悬臂3的端部,所述悬臂3通过第一液压缸5驱动,以带动清洗盘4上下摆动,所述悬臂3与回转组件之间连接有用于检测悬臂3上下摆动幅度的位移传感器6,所述位移传感器6通过信号线连接至控制系统,所述位移传感器6将检测的信号反馈至控制系统,所述第一液压缸5通过油路连接有安装于俯仰臂2上的液压储能器7;通过位移传感器6检测悬臂3的上下摆动幅度,能够判断出清洗盘4沿着金属表面清洗作业时是否发生行走路线歪斜,以便于控制系统及时控制行走机构1回正。
18.本实施例中,所述位移传感器6的两端分别交接在悬臂3和回转组件上,所述悬臂3 以及回转组件上均成对设置有两个竖板8,所述位移传感器6的两端分别通过铰接轴交接在所述竖板8上,从而能够保证位移传感器6能够随着悬臂3在第一液压缸5驱动下上下摆动时,位移传感器6不会对悬臂3的上下摆动产生阻碍。
19.本实施例中,所述控制系统为安装在行走机构1的电控箱9,所述电控箱9内设置有中央处理器,所述中央处理器连接有设置于电控箱9上的显示屏,所述位移传感器6与所述中央处理器通过信号线相连,中央处理器接收位移传感器6的检测信号,并能够对行走机构1的两个履带轮的驱动机构以及机器人的其它驱动机构进行控制;所述中央处理器连接有无线网络模块,所述中央处理器通过无线网络连接有遥控器,通过所述遥控器输入位移传感器6检测数据的报警阈值(即安全阈值上下限),从而中央处理器将接收到的位移传感器6反馈的悬臂3的摆动幅度信息与通过遥控器设定的报警阈值进行比对,当监测数据低于或高于设定的报警阈值范围时,中央处理器会控制行走机构1的对应的履带轮的驱动机构进行相应动作,以调整机器人的行走路线。
20.本技术中,所述位移传感器6采用现有技术中的直线位移传感器即可,位移传感器6 两端的伸缩杆分别交接在悬臂3以及回转组件上;关于控制系统的具体控制原理、遥控器
的具体工作原理均为现有技术,同样的关于回转组件的具体结构以及机器人俯仰臂2等工作过程和原理同样为现有技术,本技术不在赘述,具体可参考申请公布号为cn111420920a 的中国发明专利申请所公开的技术方案。
21.本实用新型在具体实施时,以清洗船侧为例,其工作过程如下:
22.机器人在对船侧进行清洗时,其行走路线为沿着船的前后向,自船底向船顶,或自船顶向船底进行逐层清洗,在正常情况下,如果机器人的行走路线保持直线,悬臂3在船侧的摆动幅度是定值,也即位移传感器6的伸缩长度是一定的,其反馈给中央处理器的检测数据亦为定值,但是因为船体自身结构的问题,很难保证船侧表面为平面,难免会由于船体长时间使用发生碰撞或者其自身结构等原因有一定的凹陷或者凸起,因此为了避免中央处理器进行误判,在进行每层清洗工作之前,操作人员都需要通过遥控器设定位移传感器 6检测数据的报警阈值;
23.在启动清洗工作后,机器人在行走机构的履带轮的驱动机构驱动下行走,在行走的过程中,在第一液压缸5的驱动作用下,清洗盘4始终与船侧面贴合,在液压储能器7的作用下,在第一液压缸5驱动悬臂3的过程中,会使得第一液压缸5适应悬臂3迎合船侧面凹陷或者凸起,此时位移传感器6检测的数据会发生变化,因为考虑了船体侧面情况,已经设定了安全阈值,因此,中央处理器不会像履带轮的驱动机构发出控制指令;
24.随着清洗工作的进行,机器人远着船侧面前后移动式,由于两个履带轮分别由不同的驱动机构进行驱动,因此,当两个驱动机构驱动力或者因为个体因素导致两个履带轮转速不一样时,机器人的行走路线将发生偏移,此时,清洗盘4同样会偏离船侧面的清洗路线,在第一液压缸5的作用下,悬臂3会向上或向下摆动,从而使得位移传感器6的检测数据发生变化,当位移传感器6检测的数据超过设定的安全阈值时,中央处理器则会控制对应履带轮的驱动机构进行减速或者加速;以机器人沿着船的左侧面向船头行走为例,当机器人发生向左偏移时(说明书左侧履带轮转速小于右侧履带轮转速),悬臂3向上摆动,位移传感器6检测数据大于设定的安全阈值时,中央处理器则控制左侧履带轮的驱动机构加大动力,以提高左侧履带轮的转速,直至两个履带轮的转速一致,以将机器人的行走路线回正。
25.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。