1.本实用新型涉及水下救援机器人技术领域,具体为一种具有辅助机械爪结构的水下救援机器人。
背景技术:
2.现今近年来,在水下搜救、海底勘探、水面应急处理等方面,水下机器人正在发挥着越来越重要的作用。尽管目前我国的水下机器人研发进展巨大,但其产业化程度仍不够,而核心部件受制于人,更是成为水下机器人进一步发展的最大阻碍。
3.市场上的水下救援机器人技术主要依靠简单下潜移动,来利用摄像进行搜救,但无法进行直接有效的搜救作业,仍需人工进行救援,其功能较为局限,不具有普遍适应性。
技术实现要素:
4.本实用新型的目的在于提供一种具有辅助机械爪结构的水下救援机器人,以解决上述背景技术中提出的市场上的水下救援机器人技术主要依靠简单下潜移动,来利用摄像进行搜救,但无法进行直接有效的搜救作业,仍需人工进行救援,其功能较为局限,不具有普遍适应性的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种具有辅助机械爪结构的水下救援机器人,包括:
6.机器人框架,所述机器人框架的内部四周设置有推进器;
7.舱体,其设置于所述机器人框架的内部中端;
8.舵机,其设置于所述机器人框架的下端一侧;
9.救援机构,其设置于所述舵机的下端底部;
10.所述救援机构包括:
11.传动齿轮,其对称设置于所述舵机的下端底部;
12.电磁铁,其设置于所述传动齿轮的外部一侧;
13.机械臂,其设置于所述电磁铁的外壁一侧;
14.自锁卡扣,其设置于所述机械臂的内侧处。
15.优选的,所述机器人框架包括:
16.上下侧板,其设置于所述机器人框架的内部上下方;
17.左右侧板,其设置于所述上下侧板的外侧处;
18.卡槽口,其开设于所述左右侧板的内部处。
19.优选的,所述上下侧板通过卡槽口和左右侧板构成卡合结构,且上下侧板和卡槽口尺寸相互配合。
20.优选的,所述推进器沿上下侧板的中轴线处呈均匀状分布,且推进器和上下侧板构成固定结构。
21.优选的,所述舵机和传动齿轮构成传动结构,且传动齿轮设置有两组并相互啮合。
22.优选的,所述机械臂通过电磁铁和传动齿轮构成电磁连接,且机械臂呈对称状分布有两组。
23.优选的,所述舱体和机器人框架构成包裹结构,且舱体呈圆柱透明状分布。
24.与现有技术相比,本实用新型的有益效果是:该具有辅助机械爪结构的水下救援机器人,采用多个机构之间的相互配合,功能性强,机械臂的夹取动作通过舵机进行控制,在识别到搜救对象时,单片机收到信号,舵机操作机械臂夹取搜救对象,在机械臂上设置有自锁卡口,自锁卡口自锁后需要重新压紧打开,此时搜救对象被机械臂夹紧,不会轻易脱离。
25.1.本实用新型,机器人框架由hdpe材料的塑料板后进行切割、钻孔和冲铣,形成侧板,使上下侧板和左右侧板进行卡合,并用螺丝进行固定住,通过外侧开设的槽体,让水流可以无阻力通过,减少在运动过程中机器人收到的阻力,提高机器人的运动效率。
26.2.本实用新型,利用舵机带动电磁铁和机械臂进行旋转,来对搜救对象进行夹紧,并夹紧完成后利用自锁卡扣锁紧,之后使电磁铁脱离机器人,利用气囊进行独自漂浮,从而将搜救对象带出水面。
附图说明
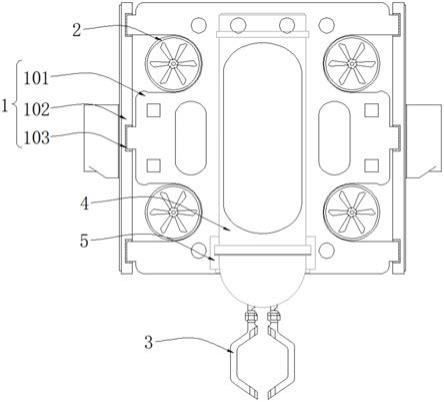
27.图1为本实用新型俯视内部结构示意图;
28.图2为本实用新型救援机构前视局部结构示意图;
29.图3为本实用新型救援机构立体结构示意图。
30.图中:1、机器人框架;101、上下侧板;102、左右侧板;103、卡槽口;2、推进器;3、救援机构;301、传动齿轮;302、电磁铁;303、自锁卡扣;304、机械臂;4、舱体;5、舵机。
具体实施方式
31.如图1所示,本实用新型提供一种技术方案:一种具有辅助机械爪结构的水下救援机器人,包括:机器人框架1,机器人框架1的内部四周设置有推进器2;机器人框架1包括:上下侧板101,其设置于机器人框架1的内部上下方;左右侧板102,其设置于上下侧板101的外侧处;卡槽口103,其开设于左右侧板102的内部处。上下侧板101通过卡槽口103和左右侧板102构成卡合结构,且上下侧板101和卡槽口103尺寸相互配合。推进器2沿上下侧板101的中轴线处呈均匀状分布,且推进器2和上下侧板101构成固定结构,机器人框架1由hdpe材料的塑料板后进行切割、钻孔和冲铣,形成侧板,使上下侧板101和左右侧板102进行卡合,并用螺丝进行固定住,通过外侧开设的槽体,让水流可以无阻力通过,减少在运动过程中机器人收到的阻力,提高机器人的运动效率。
32.如图2-3所示,本实用新型提供一种技术方案:一种具有辅助机械爪结构的水下救援机器人,舱体4,其设置于机器人框架1的内部中端;舵机5,其设置于机器人框架1的下端一侧;救援机构3,其设置于舵机5的下端底部;救援机构3包括:传动齿轮301,其对称设置于舵机5的下端底部;电磁铁302,其设置于传动齿轮301的外部一侧;机械臂304,其设置于电磁铁302的外壁一侧;自锁卡扣303,其设置于机械臂304的内侧处。舵机5和传动齿轮301构成传动结构,且传动齿轮301设置有两组并相互啮合。机械臂304通过电磁铁302和传动齿轮301构成电磁连接,且机械臂304呈对称状分布有两组。舱体4和机器人框架1构成包裹结构,
且舱体4呈圆柱透明状分布,舱体4存放用于控制的电子元器件,采用轴向密封,相比于径向密封,轴向密封更加的紧密,拆装方便,减少设备的生产成本,机械臂304与机器人通过电磁铁302连接,在搜救进行前电磁铁302上电,具有磁性。机械臂304的夹取动作通过舵机5进行控制,在识别到搜救对象时,单片机收到信号,舵机5操作机械臂304夹取搜救对象,在机械臂304上设置有自锁卡扣303,自锁卡扣303自锁后需要重新压紧打开,此时搜救对象被机械臂304夹紧,不会轻易脱离。确认搜救对象加紧后,电磁铁302断电,失去磁性,机器人与电磁铁302相互脱离,即机械臂304和处于机械臂304上的电磁铁302脱离机器人,机械臂304上固定有自动膨胀的气囊,在机器人与机械臂304脱离后,气囊迅速发生膨胀,将搜救对象带出水面,成功搜救,机器人及时返回进行下一次搜救任务。
33.综上,该具有辅助机械爪结构的水下救援机器人,使用时,首先将机器人主体放置于水下处,利用舱体4内的电子元器件进行控制,来使四周的推进器2启动,使水下救援机器人进行位置移动,并利用内部的摄像头进行观测,将水底内图像进行呈现,当发现搜救对象时,利用舵机5控制电磁铁302和机械臂304向内侧进行旋转,使操作机械臂304夹取搜救对象,夹紧完成后,使机械臂304外侧自锁卡扣303进行锁紧,确认搜救对象加紧后,电磁铁302断电,失去磁性,机器人与电磁铁302相互脱离,即机械臂304和处于机械臂304上的电磁铁302脱离机器人,机械臂304上固定有自动膨胀的气囊,在机器人与机械臂304脱离后,气囊迅速发生膨胀,将搜救对象带出水面,成功搜救,机器人及时返回进行下一次搜救任务。