1.本实用新型是涉及一种电机的改进。
背景技术:
2.现在的舵机不管是内转子式的,还是外转子式的,都只能通过pwm调制控制角度,无法根据需求来改变力矩,造成资源的浪费;此外,现在舵机的外形限制了多个电机使用时的安装方式,只能采用并联的安装方式,无法使用串联的安装方式。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出一种可串联安装、利于节能的可调力矩的中空组合式舵机。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.可调力矩的中空组合式舵机包括外壳,在外壳的内部设有定子和转子,其特征在于:在转子上设有中空套管,中空套管有外齿,与变速传动机构齿轮啮合。
6.作为一种优选方案,所述可调力矩的中空组合式舵机定子上的线圈用若干个小电机代替,每个小电机转轴上都有齿轮,相邻两两啮合,其中一个电机的转轴齿轮还与变速传动机构的齿轮啮合,所有小电机的电源线和接地线都接到控制电路板中。
7.作为一种优选方案,可调力矩的中空组合式舵机的定子由若干个小电机构成的,其中一个小电机的转轴上装有编码器,编码器的控制线连接到控制电路板上。
8.作为一种优选方案,可调力矩的中空组合式舵机外形呈环形圆柱,中空式的多舵机的定子和转子可串接安装,增加力矩。
9.作为一种优选方案,可调力矩的中空组合式舵机可根据需求对力矩进行 pwm调制,同时也可旋转角度进行pwm调制。
10.作为一种优选方案,可调力矩的中空组合式舵机只需四根线就可以对其进行控制,一根线接电源,一根线接地,其余两根线接pwm。
11.电机的整体实施过程是:用户通过一根pwm线对单个舵机的力矩进行控制,根据占空比的大小决定需要启动小电机的数量和分布,即总电机的数量乘以占空比,取整就是需要启动的电机,小电机上的转轴上的齿轮,两两相互啮合的,只要有一个电机转动就会推动其他电机转动,从而通过变速传动装置带动舵机转子转动,电机的转动角度通过编码器连接到舵机的电路板上;通过另一根pwm线对舵机的角度进行控制,判断编码器的输出值是否达到要求。如果力矩尚未达到要求,由于可调力矩的中空组合式舵机外形呈环形圆柱,可根据具体的情况,中空式的多舵机的定子和转子可串接安装,达到增加力矩的目的。
12.本实用新型的有益效果:本实用新型可调力矩的中空组合式舵机外形呈环形圆柱,中空式的多舵机的定子和转子可根据力矩的要求串接安装,增加力矩;单舵机的定子上的线圈用若干个小电机代替,可根据需要开启部分或者全部电机工作,实现改变电机力矩的目的,从而使电机一直保持在最高效输出功率区间内,不但效率更高且节省能源。
附图说明
13.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简要地说明。显而易见地,下列描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图推导出其他附图。
14.图1为本实用新型舵机的小电机(1)布局结构示意图。
15.图2为本实用新型舵机的内转子齿轮(2)布局结构示意图。
16.图3为本实用新型舵机的外转子齿轮(2)布局结构示意图。
17.图4为本实用新型舵机的小电机(1)结构示意图。
18.图5为本实用新型舵机的小电机(1)连接编码器(4)结构示意图。
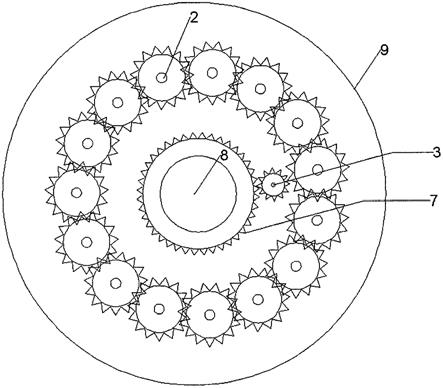
19.图6为本实用新型舵机的内部总体布局图。
20.图中:小电机(1)、齿轮(2)、变速传动装置(3)、编码器(4)、编码器数据线(5)、电路控制板(6)、中空套管(7)、中空部分(8)、外壳 (9)。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.可调力矩的中空组合式舵机包括外壳(9),在外壳(9)设有定子和转子,其特征在于:在转子上设有中空套管(7),中空套管(7)有外齿,与变速传动机构啮合。
23.参照图1,所述可调力矩的中空组合式舵机定子上的线圈用若干个小电机 (1)代替,每个小电机(1)转轴上都有齿轮(2),两两啮合,其中一个电机的转轴齿轮(2)还与变速传动机构啮合,所有小电机(1)的电源线和接地线都接到控制电路板中。
24.所述可调力矩的中空组合式舵机的定子由若干个小电机(1)构成的,其中一个小电机(1)的转轴上装有编码器(4),编码器(4)的控制线连接到电路控制板上。
25.所述可调力矩的中空组合式舵机外形呈环形圆柱,中空式的多舵机的定子和转子可串接安装,增加力矩。
26.所述可调力矩的中空组合式舵机可根据需求对力矩进行pwm调制,同时也可旋转角度进行pwm调制。
27.所述可调力矩的中空组合式舵机只需四根线就可以对其进行控制,一根线接电源,一根线接地,其余两根线接pwm。
28.电机的整体实施过程是:用户通过一根pwm线对单个舵机的力矩进行控制,根据占空比的大小决定需要启动小电机(1)的数量,即总电机的数量乘以占空比,取整就是需要启动的电机,小电机(1)上的转轴上的齿轮(2),两两相互啮合的,只要有一个电机转动就会推动其他电机转动,从而通过变速传动装置(3)带动舵机转子转动,电机的转动角度通过编码器(4)连接到舵机的电路板上;通过另一根pwm线对舵机的角度进行控制,判断编码器(4)的输出值是否达到要求。如果力矩尚未达到要求,由于可调力矩的中空组合式舵机外形呈环形圆柱,可根据具体的情况,中空式的多舵机的定子和转子可串接安装,达到增加力矩的目的。
29.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则上,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.可调力矩的中空组合式舵机包括外壳,在外壳的内部设有定子和转子,其特征在于:在转子上设有中空套管,中空套管有外齿,与变速传动机构齿轮啮合。2.根据权利要求1所述的可调力矩的中空组合式舵机,其特征在于:定子上的线圈用若干个小电机代替,每个小电机转轴上都有齿轮,两两啮合,其中一个小电机转轴上的齿轮还与变速传动机构齿轮啮合,所有小电机的电源线和接地线都接到控制电路板中。3.根据权利要求1所述的可调力矩的中空组合式舵机,其特征在于:可调力矩的中空组合式舵机的定子由若干个小电机构成的,其中一个小电机的转轴上装有编码器,编码器的控制线连接到控制电路板上。4.根据权利要求1所述的可调力矩的中空组合式舵机,其特征在于:可调力矩的中空组合式舵机外形呈环形圆柱,中空式的多舵机的定子和转子可串接安装,增加力矩。5.根据权利要求1所述的可调力矩的中空组合式舵机,其特征在于:可调力矩的中空组合式舵机可根据需求对力矩进行pwm调制,同时也可旋转角度进行pwm调制。6.根据权利要求1所述的可调力矩的中空组合式舵机,其特征在于:可调力矩的中空组合式舵机只需四根线就可以对其进行控制,一根线接电源,一根线接地,其余两根线接pwm。
技术总结
可调力矩的中空组合式舵机是涉及到一种电机的改进。可调力矩的中空组合式舵机分为内转子和外转子两种。本实用新型专利以内转子为例说明,可调力矩的中空组合式舵机包括外壳,在外壳的内部设有定子和转子,在转子上设有中空套管,内转子上有外齿,与变速传动机构齿轮啮合,在定子上的线圈用若干个小电机代替,每个小电机转轴上都有齿轮,相邻两两啮合,其中一个电机的转轴齿轮还与变速传动机构啮合。该舵机有外转子和内转子两种,是中空式的,可通过实心轴拼接,便于安装,可按力矩的需求启动其中的若干个小电机,不但效率高还可节约能源,还可以若干个该舵机串接使用,使电机的力矩不断增大。矩不断增大。矩不断增大。
技术研发人员:陈明
受保护的技术使用者:浙江理工大学
技术研发日:2021.03.05
技术公布日:2022/1/6