一种基于水下动态回收平台的auv回收方法
技术领域
1.本发明涉及智能水下航行器回收技术领域,更具体的说是涉及一种基于 水下动态回收平台的auv回收方法。
背景技术:
2.目前,智能水下航行器(autonomous underwater vehicle auv)作为水下无 人装备体系的核心设备,具有自主性、灵活性、作业范围广、作业用途多等 特点,在水文环境监测、水下资源探测、水下情报侦察、反水雷等方面具有 重要的意义。但auv受能源与水下通信的影响,必须定期回收进行能源补给、 信息交互才能继续作业,并完成新的委派任务。为解决auv能源制约与信息 交互问题,部分机构开展了auv水下回收技术研究。目前水下回收技术主要 可分为水下固定式对接回收和基于潜艇的水下移动式对接回收。
3.但是,水下固定式回收一般在水底布放固定的水下对接基站进行回收。 这种方式缺陷在于:首先,基站需要平整平面作为支撑,但海底环境复杂多 变,与之配套的功能通信线缆配置复杂,部分海域水深较大,大水深耐压壳 体设计困难;此外,对接装置位置固定,仅依赖auv的运动控制性能作业, 无法避开流体影响较大区域,降低了auv回收的成功率;最后,近距离的基 于光视觉的对接方法依赖于水下摄像机参数,而水下摄像机的内外参数是难 以精确获得的;如果利用潜艇进行对接回收,首先,潜艇一般会处于悬停或 定常运动状态,这种auv主动接近潜艇的行为牺牲了潜艇的主动性,欠缺精 确性;此外,收装置对潜艇的线型设计的影响以及回收过程中产生的噪声均 可能降低潜艇的隐蔽性;最后,回收过程中auv可能会由于海流影响与潜艇 产生碰撞,影响两者的安全性。
4.因此,不依赖海洋深度与海底地形,不依赖于摄像机内外参数,对接过 程中根据外界环境信息以及auv标识灯的状态主动调整回收平台位姿实现对 接,具有更好的机动活性是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种基于水下动态回收平台的auv回收方法, 通过动态回收平台根据回收区域的水文条件调节自身位姿,避免近距离回收 过程中侧向流对auv的动态影响,通过动态无标定视觉伺服方法作为制导 律,克服了传统基于单目或双目摄像机回收时摄像机内外参数不精确造成的 作业精度低的问题。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种基于水下动态回收平台的auv回收方法,包括以下步骤:
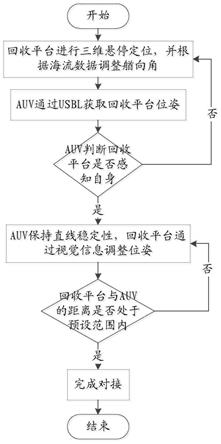
8.s1、回收平台进行三维悬停定位,并根据海流数据调整艏向角;
9.s2、auv通过usbl获取回收平台位姿;
10.s3、auv判断回收平台是否感知自身,若是,则auv保持直线稳定性, 回收平台通过视觉信息调整位姿;
11.s4、判断回收平台与auv的距离是否处于预设范围内,若是,则判定 auv到达期望
位置,完成对接。
12.优选的,所述步骤s1具体包括:
13.基于位置阶,进行三维悬停定位,基于姿态阶,通过海流数据调整艏向 角,其位姿制导律为:
[0014][0015]
其中,下标p代指平台,下标d代指期望值。(x
intial
,y
intial
,z
intial
)为预设的期望 位置;为平台的期望姿态,为保证回收的平稳性,平台的期望纵倾 和横倾均为0,ur和vr分别为平台随体坐标系下沿x轴和y轴的水流速度,确 保auv在回收装置附近不受侧向流影响。
[0016]
优选的,所述步骤s2具体包括:
[0017]
auv通过usbl获取回收平台的位姿,auv的制导律为:
[0018][0019]
其中,下标a代指auv,(x
usbl
,y
usbl
,z
usbl
)为auv通过usbl获取的期望位 姿信号,auv通过水声通信设备获取ψ
pd
并计算自身的ψ
ad
,u1为一定常量。 auv根据usbl信号接近回收平台。
[0020]
优选的,所述步骤s3具体包括:
[0021]
s31、基于水声通信设备,auv获知动态平台发现自身后,保持直线稳 定性,回收平台利用视觉信息调整自身位姿;其中,对于auv有:
[0022][0023]
其中,u2为预定航速,且被发现后,auv航速不变;
[0024]
s32、回收平台需要根据视觉信息主动调整自身位姿,完成对接任务,基 于单目摄
像机,有:
[0025][0026]
其中,下标un表示基于的单目摄像机无标定视觉伺服算法所解算出的期 望位姿;在期望速度项解算中,ky,kz,k
ψ
为正增益;
[0027]
s33、基于partitioned broyden算法估计雅克比矩阵以及目标动态信息, 在算法的第k步,有:
[0028][0029][0030]
其中,为协方差矩阵,为回收平台三自由度步长 和采样时间构成的一维向量,κ∈(0,1]为遗忘因子,为雅克比矩阵 的估计值与目标运动速度估计值的复合矩阵,有标运动速度估计值的复合矩阵,有标运动速度估计值的复合矩阵,有为 像平面特征点在第k步时的误差向;
[0031]
s34、回收平台计算下一步的期望输出,为:
[0032][0033]
其中,ζ
k+1
=[v
dk+1
,w
dk+1
,r
dk+1
]
t
,即在第k+1步时平台期望横移速度、升沉速 度以及回转速度,λ为增益矩阵。
[0034]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基 于水下动态回收平台的auv回收方法,通过动态回收平台根据回收区域的水 文条件调节自身位姿,避免近距离回收过程中侧向流对auv的动态影响,通 过动态无标定视觉伺服方法作为制导律,克服了传统基于单目或双目摄像机 回收时摄像机内外参数不精确造成的作业精度低的问题。
附图说明
[0035]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实 施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面 描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不 付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0036]
图1附图为本发明提供的水下动态平台结构示意图。
[0037]
图2附图为本发明提供的回收流程示意图。
[0038]
图3附图为本发明提供的象平面特征点状态示意图。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而 不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做 出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
本发明实施例公开了一种基于水下动态回收平台的auv回收方法,包括 以下步骤:
[0041]
s1、回收平台进行三维悬停定位,并根据海流数据调整艏向角;
[0042]
s2、auv通过usbl获取回收平台位姿;
[0043]
s3、auv判断回收平台是否感知自身,若是,则auv保持直线稳定性, 回收平台通过视觉信息调整位姿;
[0044]
s4、判断回收平台与auv的距离是否处于预设范围内,若是,则判定 auv到达期望位置,完成对接。
[0045]
为进一步优化上述技术方案,步骤s1具体包括:
[0046]
基于位置阶,进行三维悬停定位,基于姿态阶,通过海流数据调整艏向 角,其位姿制导律为:
[0047][0048]
其中,下标p代指平台,下标d代指期望值。(x
intial
,y
intial
,z
intial
)为预设的期望 位置;为平台的期望姿态,为保证回收的平稳性,平台的期望纵倾 和横倾均为0,ur和vr分别为平台随体坐标系下沿x轴和y轴的水流速度,确 保auv在回收装置附近不受侧向流影响。
[0049]
为进一步优化上述技术方案,步骤s2具体包括:
[0050]
auv通过usbl获取回收平台的位姿,auv的制导律为:
[0051][0052]
其中,下标a代指auv,(x
usbl
,y
usbl
,z
usbl
)为auv通过usbl获取的期望位 姿信号,auv通过水声通信设备获取ψ
pd
并计算自身的ψ
ad
,u1为一定常量。 auv根据usbl信号接近回收平台。
[0053]
为进一步优化上述技术方案,步骤s3具体包括:
[0054]
s31、基于水声通信设备,auv获知动态平台发现自身后,保持直线稳 定性,回收平台利用视觉信息调整自身位姿;其中,对于auv有:
[0055][0056]
其中,u2为预定航速,且被发现后,auv航速不变;
[0057]
s32、回收平台需要根据视觉信息主动调整自身位姿,完成对接任务,基 于单目摄像机,有:
[0058][0059]
其中,下标un表示基于的单目摄像机无标定视觉伺服算法所解算出的期 望位姿;在期望速度项解算中,ky,kz,k
ψ
为正增益;
[0060]
s33、基于partitioned broyden算法估计雅克比矩阵以及目标动态信息, 在算法的第k步,有:
[0061][0062]
[0063]
其中,为协方差矩阵,为回收平台三自由度步长 和采样时间构成的一维向量,κ∈(0,1]为遗忘因子,为雅克比矩阵 的估计值与目标运动速度估计值的复合矩阵,有标运动速度估计值的复合矩阵,有标运动速度估计值的复合矩阵,有为 像平面特征点在第k步时的误差向;
[0064]
s34、回收平台计算下一步的期望输出,为:
[0065][0066]
其中,ζ
k+1
=[v
dk+1
,w
dk+1
,r
dk+1
]
t
,即在第k+1步时平台期望横移速度、升沉速 度以及回转速度,λ为增益矩阵。
[0067]
如图1所示,本发明中涉及的回收平台是一种携带镂空喇叭口回收装置 的水下机器人。它搭载惯导、深度计、磁罗经、多普勒测速仪动状态感知; 利用与auv定位用usbl实现auv对回收平台的远距离定位;利用喇叭口 过渡段搭载的单目摄像机进行近距离精确回收。回收平台搭载多个推进器作 为执行机构,进而实现运动控制功能。本发明中所涉及的待回收auv在其横 滚面上按菱形布置了四个不在同一条直线的led灯作为光源,从而起到近距 离回收标识物作用。此外,它还搭载惯导、深度计、磁罗经、多普勒测速仪、 与平台定位用usbl作为传感器;水下推进器和舵翼系统作为执行机构。
[0068]
auv被置于距离回收平台500m距离处,准备开始回收任务:
[0069]
auv通过usbl在远距离确定回收平台位姿,并进行粗略接近;回收平 台和auv所搭载的传感器,设计远距离接近时回收平台的制导律为:
[0070][0071]
其中,下标a代指平台,(x
usbl
,y
usbl
,z
usbl
)为auv通过usbl获取的期望位姿 信号,auv通过水声通信设备获取ψ
pd
并计算自身的ψ
ad
,保证auv与回收 平台相对回收,u1为一定常常量。auv在这一过程中,根据usbl信号接近 回收平台。
[0072]
从位置阶考虑,回收平台需要实现定位于预设位置;从姿态阶考虑,回收平 台需要调整艏向角,使回收装置附近无侧向流影响auv。auv需要根据平台 位姿调整自身位姿接近平台。
[0073]
在水下环境中,相对于光学信号,声学信号传播范围远,精度稍低, 而且传感器周期更长,因此这种基于声信号的趋近是粗略的,但足以使auv 进入平台摄像机视觉范围内。
[0074]
回收平台通过单目摄像机在近距离对auv进行精确回收任务。auv不 仅可以通过水声通信设备获取平台艏向信息,还能获取平台视觉判断标识位。 定义一种可传输的平台视觉标识位δ∈{0,1},在平台摄像机发现auv携带的 光源后,则δ=1,否则δ=0。假设在时间节点t=t时δ=0,在t=t+1时δ=1。
[0075]
依据回收平台和auv所搭载的传感器以及标志物,设计近距离回收时 auv的制导律为:
[0076][0077]
其中,u2为预定航速。考虑到水下近距离条件了光学定位精度高于声学 定位,在平台发现auv后,auv不再依赖usbl信息去调整自身位姿,而 是保持除了纵荡自由度外所有自由度的期望位姿,并保持一定纵荡速度。这 是为了便于回收平台确定auv相对位姿实现高效对接。
[0078]
回收平台根据视觉信息主动调整自身位姿,完成对接任务,基于单目摄 像机,有:
[0079][0080]
其中,下标un表示基于的单目摄像机无标定视觉伺服算法所解算出的期 望位姿。在期望速度项解算中,ky,kz,k
ψ
分别为正增益。即任意自由度偏差较 大时,回收平台与auv在纵向保持一致同向速度,每种自由度偏差均较小时, 回收平台纵向速度趋近于0。
[0081]
动态无标定视觉伺服给出了回收平台的(y
pd
,z
pd
,ψ
pd
)。传统的光学引导的 auv回收对接需要双目摄像机进行定位,本方法只需要单目摄像机。传统的 视觉伺服方法需要摄像机的内外参数,面临以下困难:首先,水下摄像机的 标定过程较为繁杂;其次,水下摄像机还需考虑广在空气与水之间的折射, 陆地标定方法难以直接应用于水下摄像机标定;此外,一组标定参数难以适 应密度不同的多种水域;最后,传统的视觉伺服算法难以应对动态目标。因 此,有必要利用动态无标定视觉伺服方法研究水下动态平台与auv的回收任 务。
[0082]
视觉伺服的核心是利用描述特征点在像平面位置的一阶导数与平台运动 速度的雅可比矩阵,完成视觉伺服任务。这种雅克比矩阵取决于摄像机内外 参数、光源特征在摄像机坐标系下的深度等信息,难以取得其精确的解析解。 采用partitionedbroyden算法一并估计雅克比矩阵以及目标动态信息,在算法 的第k步,有:
[0083]
[0084][0085]
为协方差矩阵,为回收平台三自由度步长和采样时 间构成的一维向量,κ∈(0,1]为遗忘因子,为雅克比矩阵的估计值 与目标运动速度估计值的复合矩阵,有定义第i个特征点在 二维像平面的实际位置和期望位置分别为[ui,vi]
t
和[u
id
,v
id
]
t
,进一步定义向量 为像平面特征点在第k步时的误差向 量。
[0086]
回收平台下一步的期望输出为:
[0087][0088]
其中,ζ
k+1
=[v
dk+1
,w
dk+1
,r
dk+1
]
t
,即在第k+1步时平台期望横移速度、升沉速 度以及回转速度,λ为增益矩阵。在δx小于预设值ε后,可认为auv到达了 期望位置,回收装置中锁紧机构锁紧auv,完成对接任务。这一过程中,动 态回收平台按照期望输出运动;图3中特征点会从像平面的实际位置收敛到期 望位置。
[0089]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都 是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。 对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述 的比较简单,相关之处参见方法部分说明即可。
[0090]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用 本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易 见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下, 在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例, 而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。