1.本实用新型涉及一种水下机器人,具体涉及一种履带式水下采捕机器人。
背景技术:
2.以前渔业养殖主要依靠近岸海域连片的养殖设施和粗放的饵料投喂,其养殖产出大,污染大,致使“鱼”越养越小。
3.如今渔业养殖从近海走向远海,从粗放转为精细,特别是进行人工鱼礁建设后,用海面积超过850平方公里,投放鱼礁超过6094万立方米。但由于目前鱼礁多数为沉船、石头混凝土、旧集装箱、废旧火车或者汽车箱体等等,随意丢在海底,采捕难度非常大。如由人工采捕,采捕员往往需要深潜十几米,忍受巨大水压,采捕效率较低,而且长时间工作的采捕员往往脊柱都被不同程度的压弯,深受各类职业病折磨,生命财产安全得不到保证,而海洋环境恶劣且不可控,也造成潜水采捕员大量缺失。如采用机器代替人工采捕,现有的采捕机械在海底漂浮不定,采捕效率不高,且无法稳定按指定轨迹行走。因此,现在业内亟需解决采捕作业问题。
技术实现要素:
4.针对上述现有技术中存在的不足,本实用新型提供了一种履带式水下采捕机器人,其具有一定的视觉和感知能力,能够沿着垄道环稳定行驶并采捕渔获,实现智能养殖与采捕。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种履带式水下采捕机器人,其特征在于,所述采捕机器人包括机器人本体、支架、履带组件、浮力层、刷子、吸鱼泵、吸鱼管和渔获舱;
7.所述机器人本体安装在所述支架上;所述履带组件和所述渔获舱分别安装在所述支架底部,所述履带组件用于带动所述采捕机器人在海底爬行,所述渔获舱置于所述履带组件与所述支架之间用于装载渔获,所述渔获舱的侧壁及底板均为镂空板;所述浮力层通过所述支架安装在所述机器人本体上方,用于调节所述采捕机器人的浮力;两个所述刷子对称置于所述采捕机器人前方,分别通过水下电机驱动旋转将海底的渔获扫起来;所述吸鱼泵置于所述支架上,所述吸鱼管前端具有横置的开口部,所述吸鱼泵通过所述吸鱼管将所述渔获吸进所述渔获舱内。
8.进一步地,所述履带组件包括履带底盘、履带、驱动轮、导向轮、支重轮,所述履带底盘安装在所述支架底部,两个所述履带对称设置在所述履带底盘的左右两侧;所述履带的前后两端分别套接在所述驱动轮和所述导向轮上;所述驱动轮与所述履带啮合传动;所述驱动轮由履带驱动电机驱动转动;多个所述支重轮依次并列设置在所述驱动轮和所述导向轮之间;所述驱动轮、所述支重轮和所述导向轮依次安装在所述履带底盘侧部。
9.进一步地,所述机器人本体上设有1#推进器、2#推进器、3#推进器、4#推进器、5#推进器、6#推进器;所述1#推进器和所述2#推进器对称设置在所述机器人本体前方中部;所述
3#推进器和所述4#推进器对称设置在所述机器人本体后端的左右两侧;所述5#推进器和所述6#推进器对称竖立在所述浮力层中。
10.进一步地,所述机器人本体上还设有1#灯、2#灯、3#灯、4#灯、1#摄像头、2#摄像头、3#摄像头;在所述机器人本体前上方中间安装所述1#摄像头,所述1#灯和所述2#灯对称安装在所述1#摄像头左右两侧;在所述机器人本体前中部两侧所述3#灯与所述4#灯、所述2#摄像头与所述3#摄像头分别左右对称设置。
11.进一步地,所述机器人本体上还设有1#分线盒、2#电源盒、3#电源盒、4#控制盒、5#分线盒;
12.所述1#分线盒与所述2#电源盒、所述3#电源盒、所述4#控制盒、所述5#分线盒分别相连;所述1#分线盒用于接收并传递电源和数据信号;所述1#分线盒通过所述2#电源盒、所述3#电源盒为所述机器人本体和所述水下电机供电;所述1#分线盒通过所述4#控制盒传输所述机器人本体和所述履带组件的数据信号;所述1#分线盒通过所述5#分线盒为所述履带组件和所述吸鱼泵供电。
13.进一步地,所述4#控制盒内包括工控机和光端机,所述工控机与所述1#分线盒相连,所述工控机通过所述光端机将信号指令分别传送至所述机器人本体和所述履带组件。
14.进一步地,所述浮力层包括浮力层本体和固体浮力材料,所述浮力层本体为轻质、高强度材料制作的耐压壳体,所述耐压壳体具有注水、排水功能,所述固体浮力材料设置在所述浮力层本体内。
15.进一步地,所述支架包括左主支架、右主支架、左刷子支架、右刷子支架、大梁板和前护板;所述左主支架和所述右主支架对称固接在所述大梁板上方的左右两侧,所述左刷子支架和所述右刷子支架对称固接在所述大梁板的左右前方;所述前护板固定在所述大梁板的前下方,位于所述左刷子支架和所述右刷子支架之间;所述机器人本体置于所述大梁板上。
16.进一步地,所述采捕机器人与鱼礁本体、中央控制平台配套使用,所述鱼礁本体被放置于海底,所述中央控制平台漂浮在所述鱼礁本体的上方,所述中央控制平台对所述采捕机器人供电,并引导所述采捕机器人在所述鱼礁本体内爬行并采捕渔获。
17.进一步地,所述采捕机器人与所述中央控制平台通过零浮力电缆相连。
18.本实用新型的有益效果:
19.本实用新型结构简单,设计巧妙,成本低,能够控制采捕机器人在水下的位置和方向,以自主平衡姿态,按预定轨迹行驶,并可在水下稳定爬行,可全天候、全区域、全水深采捕,即可完成高效采捕,又可实现实时监测。
20.本发明在水下零浮力时沉底,利用浮力层形成负浮力,使履带具备一定的抓地力,停止推进器,通过履带组件实现稳定爬行;本发明通过多个推进器可实现采捕机器人前、后、左、右及上、下各方向的位移,可使其对正位置后沉底;同时,履带组件还增加了采捕机器人的底部重量,利于与其上部的推进器模块相配合,使采捕机器人在前、后浮游、上浮或下潜及转弯过程中保持平衡,避免翻转或倾斜。本发明中的固体浮力材料为深潜提供足够的静浮力,当发生意外时,固体浮力材料可保证采捕机器人自动上浮,不至于丢失,以保证生命及财产安全。
21.本发明中的支架通过左、右主支架和大梁板组成的u型结构可稳定安装机器人本
体,支架前方的左刷子支架和右刷子支架可与刷子快速拆装,浮力层通过支架安装在机器人本体上方,由此,通过支架的模块化处理可实现采捕机器人的便捷组装。同时,因机器人本体中控制、推进、信号传输及图像采集所用设备均为独立模块,将其安装在支架的相应位置上,不仅方便维护,还可以快速构建应用于不同场合的水下机器人,将极大地促进采捕机器人在海洋渔牧业中的应用。
22.另外,本发明的采捕机器人也可用于实时的环境监测,以机器代替人工,让养殖人员可以及时的对突发情况进行处理,能够降低海洋牧场运营过程中的人工管理成本、及采摘成本,实现智能养殖与采捕。
附图说明
23.图1为本实用新型履带式水下采捕机器人与鱼礁本体、中央控制平台的配套使用示意图;
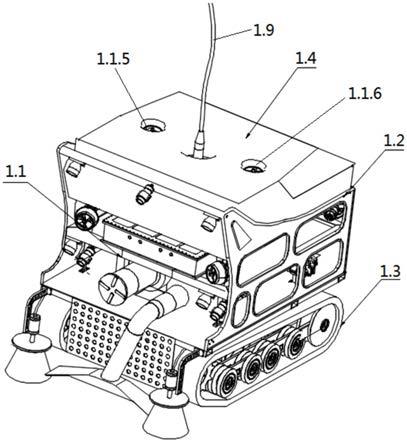
24.图2为本实用新型履带式水下采捕机器人的总体示意图;
25.图3为本实用新型中机器人本体的分线盒、电源盒以及接线盒示意图;
26.图4为本实用新型中渔获舱示意图;
27.图5为本实用新型中机器人本体的结构示意图;
28.图6为本实用新型履带式水下采捕机器人的左视图;
29.图7为本实用新型中支架的示意图。
30.其中:1
‑
采捕机器人、1.1
‑
机器人本体、1.1.1
‑
1#推进器、1.1.2
‑
2#推进器、1.1.3
‑
3#推进器、1.1.4
‑
4#推进器、1.1.5
‑
5#推进器、1.1.6
‑
6#推进器、1.1.7
‑
1#灯、1.1.8
‑
2#灯、1.1.9
‑
3#灯、1.1.10
‑
4#灯、1.1.11
‑
1#摄像头、1.1.12
‑
2#摄像头、1.1.13
‑
3#摄像头、1.1.14
‑
1#分线盒、1.1.15
‑
2#电源盒、1.1.16
‑
3#电源盒、1.1.17
‑
4#控制盒、1.1.18
‑
5#分线盒、1.2
‑
支架、1.2.1
‑
左主支架、1.2.2
‑
右主支架、1.2.3
‑
左刷子支架、1.2.4
‑
右刷子支架、1.2.5
‑
大梁板、1.2.6
‑
前护板、1.3
‑
履带组件、1.3.1
‑
履带、1.3.2
‑
驱动轮、1.3.3
‑
导向轮、1.3.4
‑
支重轮、1.4
‑
浮力层、1.5
‑
刷子、1.6
‑
吸鱼泵、1.7
‑
吸鱼管、1.8
‑
渔获舱、1.9
‑
零浮力电缆、2
‑
鱼礁本体、2.1
‑
垄道环、3
‑
中央控制平台。
具体实施方式
31.下面结合说明书附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例仅用于说明本实用新型,但不用来限制本实用新型的范围。
32.本技术文件中的上、下、左、右、内、外、前端、后端、头部、尾部等方位或位置关系用语是基于附图所示的方位或位置关系而建立的。附图不同,则相应的位置关系也有可能随之发生变化,故不能以此理解为对保护范围的限定。
33.本实用新型中,术语“安装”、“相连”、“相接”、“连接”、“固定”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,也可以是一体地连接,也可以是机械连接,也可以是电连接或可以相互通信,也可以是直接连接,也可以是通过中间媒介间接连接,可以是两个元器件内部的联通,也可以是两个元器件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
34.本实施例记载了一种履带式水下采捕机器人,其可用于收集渔获,同时对海底信
息监测、采集数据保护海洋环境。如图1所示,可将本实施例提供的采捕机器人1与鱼礁本体2、中央控制平台3配套使用,构成一套海洋底播模块,实现智能化养殖与采捕。
35.采捕机器人1在鱼礁本体2底部爬行并收集渔获,还可对海底信息监测、采集数据保护海洋环境。鱼礁本体2被放置于海底,如海平面下方20米处,用于养殖、聚集鱼虾。中央控制平台3漂浮在鱼礁本体2的上方,用于对采捕机器人1进行供电,并发送捕鱼指令。采捕机器人1与中央控制平台3之间可以通过射频信号、广播信号、无线网络信号等无线形式进行数据传输,也可以通过有线电缆方式进行数据传输。优选地,采捕机器人1与中央控制平台3之间用于传输电力的电缆、以及传输数据的有线电缆为零浮力电缆,零浮力电缆可克服自重浮于水面,并具有良好的防水性能。
36.本实施例中采捕机器人1如图2至图4所示,包括机器人本体1.1、支架1.2、履带组件1.3、浮力层1.4、刷子1.5、吸鱼泵1.6、吸鱼管1.7和渔获舱1.8。机器人本体1.1安装在支架1.2上。履带组件1.3和渔获舱1.8分别安装在支架1.2底部,渔获舱1.8置于履带组件1.3与支架1.2之间,其中,履带组件1.3用于带动采捕机器人1在海底爬行,渔获舱1.8用于承装渔获。浮力层1.4通过支架1.2安装在机器人本体1.1上方,用于采捕机器人1的上浮。两个刷子1.5对称置于采捕机器人1前方,在1#水下电机、2#水下电机分别带动下实现旋转,将海底的渔获扫起来,吸鱼泵1.6置于支架1.2上,与吸鱼管1.7后端口相连,吸鱼管1.7前端具有横置的开口部,开口部置于两个刷子1.5之间,吸鱼泵1.6通过吸鱼管1.7将刷子1.5扫起来的渔获吸进渔获舱1.8内。
37.如图2、图5和图6所示,机器人本体1.1上设有1#推进器1.1.1、2#推进器1.1.2、3#推进器1.1.3、4#推进器1.1.4、5#推进器1.1.5、6#推进器1.1.6、1#灯1.1.7、2#灯1.1.8、3#灯1.1.9、4#灯1.1.10、1#摄像头1.1.11、2#摄像头1.1.12、3#摄像头1.1.13。
38.在机器人本体1.1前方中部横梁上1#推进器1.1.1与2#推进器1.1.2、3#灯1.1.9与4#灯1.1.10、2#摄像头1.1.12与3#摄像头1.1.13分别对称设置在左右两侧。在机器人本体1.1前方上侧横梁中间安装1#摄像头1.1.11,1#灯1.1.7和2#灯1.1.8对称安装在1#摄像头1.1.11左右两侧。3#推进器1.1.3和4#推进器1.1.4对称设置在机器人本体1.1后端的左右两侧,5#推进器1.1.5和6#推进器1.1.6对称竖立在机器人本体1.1上方浮力层1.4中,且其驱动口透过浮力层1.4连通外界。其中,1#推进器1.1.1、2#推进器1.1.2、3#推进器1.1.3、4#推进器1.1.4可以推进采捕机器人1前、后、左、右方向浮游,5#推进器1.1.5、6#推进器1.1.6在竖直方向上可以推进采捕机器人1的上浮或下潜,灯光用于照明或者诱鱼,摄像头用于实现实时监控。
39.在机器人本体1.1上还设有多个接线盒,用于为采捕机器人1上各部件供电和信号传输。如图5所示,本实施例中1#分线盒1.1.14、2#电源盒1.1.15、3#电源盒1.1.16、4#控制盒1.1.17、5#分线盒1.1.18组成的接线盒安装在机器人本体1.1的前后横梁上。
40.其中,1#分线盒1.1.14连接中央控制平台3配置的电缆和光缆的主干线,主干线所用的有线电缆优选为零浮力电缆1.9(见图2)。1#分线盒1.1.14与2#电源盒1.1.15、3#电源盒1.1.16、4#控制盒1.1.17、5#分线盒1.1.18分别线路相连,对主干线进行分支。
41.中央控制平台3通过主干线将电源输送至1#分线盒1.1.14,再由1#分线盒1.1.14分别传输至2#电源盒1.1.15、3#电源盒1.1.16,然后经2#电源盒1.1.15和3#电源盒1.1.16变压后为与之连接的采捕机器人1中所用的用电组件供电。如2#电源盒1.1.15通过盒内的
一个三相变压器,将电源380v转换成48v后,给1#推进器1.1.1和2#推进器1.1.2分别提供前后推进动力,通过盒内的另一个三相变压器,将电源380v转换成48v后,给3#推进器1.1.3和4#推进器1.1.4分别提供前后推进动力;3#电源盒1.1.16通过盒内的一个三相变压器将电源380v转换成48v后,给5#推进器1.1.5和6#推进器1.1.6提供上浮、下潜的动力推进,3#电源盒1.1.16通过盒内的另一个三相变压器,将电源380v转换成12v后,给1#灯1.1.7、2#灯1.1.8、3#灯1.1.9、4#灯1.1.10、1#水下电机、2#水下电机、1#摄像头1.1.11、2#摄像头1.1.12、3#摄像头1.1.13分别供电。
42.4#控制盒1.1.17内包括工控机和光端机,工控机通过1#分线盒1.1.14与中央控制平台3的飞控板相连,工控机通过光端机与1#履带驱动电机、2#履带驱动电机、1#摄像头1.1.11、2#摄像头1.1.12、3#摄像头1.1.13分别相连,光端机控制履带驱动电机给左、右履带1.3.1发送前进、后退、拐弯指令,给摄像头发送采集、传输信号指令。同时,在中央控制平台3上还可通过飞控板实现与1#分线盒1.1.14的rj45网络传输,利用微处理器的数字输出对4#控制盒1.1.17上的模拟电路进行控制,实现1#灯1.1.7、2#灯1.1.8、3#灯1.1.9、4#灯1.1.10的开关和亮度变化,以及为1#推进器1.1.1、2#推进器1.1.2,3#推进器1.1.3、4#推进器1.1.4、5#推进器1.1.5、6#推进器1.1.6提供信号传输,通过数模转换,实现下潜深度测量及通信控制,光端机对采捕机器人1进行信号传输,并发送捕鱼指令。
43.5#分线盒1.1.18内含有泵站电机,泵站电机与吸鱼泵1.6相连,为吸鱼泵1.6供电。同时,在5#分线盒1.1.18内还包括两个变频器,与履带组件1.3中1#、2#履带驱动电机分别相连,变频器将电源变频后为履带驱动电机供电,带动履带组件1.3进行爬行。
44.如图7所示,本实施例中,支架1.2包括左主支架1.2.1、右主支架1.2.2、左刷子支架1.2.3、右刷子支架1.2.4、大梁板1.2.5和前护板1.2.6,左主支架1.2.1和右主支架1.2.2对称固定连接在大梁板1.2.5上方的左右两侧,形成u型结构,左刷子支架1.2.3和右刷子支架1.2.4为向下弯的l型结构,对称固定连接在大梁板1.2.5的左右前方,底端可通过插拔式快速连接方式与刷子1.5相连,实现快速拆装。前护板1.2.6固定在大梁板1.2.5的前下方,位于左刷子支架1.2.3和右刷子支架1.2.4之间,可避免渔获或杂物等进入采捕机器人1底部,阻碍履带组件1.3的爬行移动。机器人本体1.1通过与左主支架1.2.1、右主支架1.2.2以及大梁板1.2.5的连接固定置于大梁板1.2.5上。优选地,本实施例中左主支架1.2.1和右主支架1.2.2结构相同,均具有多个开孔,在保证支架1.2强度的同时,减轻重量,还可避免增大移动阻力。前护板1.2.6为镂空板,也可避免增大移动阻力。支架1.2中所用的连接均可采用螺钉连接。
45.如图6所示,本实施例中,履带组件1.3包括履带底盘、履带1.3.1、驱动轮1.3.2、导向轮1.3.3、支重轮1.3.4,履带底盘安装在支架1.2底部,两个履带1.3.1对称设置在履带底盘的左右两侧,履带1.3.1的左右两端分别套接在导向轮1.3.3和驱动轮1.3.2上,驱动轮1.3.2外圈具有凸齿,用于与履带1.3.1啮合传动,多个支重轮1.3.4依次并列设置在驱动轮1.3.2和导向轮1.3.3之间,驱动轮1.3.2、导向轮1.3.3和支重轮1.3.4分别安装在履带底盘侧部。左、右驱动轮1.3.2通过1#履带驱动电机、2#履带驱动电机分别驱动转动,继而带动履带1.3.1转动,实现采捕机器人1移动、转弯、爬坡、行走等爬行。通过控制驱动轮1.3.2的转速可调节采捕机器人1的行走速度,导向轮1.3.3可根据履带1.3.1长度调整相对履带底盘的安装位置,使履带1.3.1保持张紧状态,承受行走时履带1.3.1所受冲击力,可保证引导履
带1.3.1正确卷绕方向,防止跑偏和越轨。履带组件1.3通过支重轮1.3.4支撑采捕机器人1的全部重量,以便带动采捕机器人1实现前进、后退、转弯、行走等功能。
46.浮力层1.4用以改变采捕机器人1的浮力。本实施例中,浮力层1.4的浮力层本体为新型、轻质、高强度材料制作的耐压壳体,轻质材料可减轻耐压壳体本身的质量,在浮力层本体内设有固体浮力材料,为深潜提供足够的静浮力,也使采捕机器人1为零浮力。同时浮力层本体具有注水、排水功能,当采捕机器人1下潜至海底时,打开注水口,向浮力层本体内注水,采捕机器人1形成负浮力,使履带1.3.1具备一定的抓地力,便于采捕机器人1在海底稳定爬行,当采捕机器人1要上浮时,浮力层本体通过排水口排出海水,使采捕机器人1恢复零浮力,利于采捕机器人1上浮。而固体浮力材料的使用,使得在上浮发生意外时,如机械动力停止、吊装缆绳断裂等情况,固体浮力材料可保证采捕机器人1自动上浮,不至于丢失,以保证生命及财产安全。浮力层1.4中间还具有开口,采捕机器人1与中央控制平台3之间连接的有线电缆可由此开口中穿过。
47.本实施例中,渔获舱1.8顶部具有开口,渔获由开口送入渔获舱1.8中,渔获舱1.8的侧壁及底板均为镂空板,可避免阻碍海水流动,在采捕机器人1上浮后也方便海水漏出。
48.本实施例中,采捕机器人1的顶部可设置吊装装置,用于实现采捕机器人1的回收。
49.本实施例中所用的鱼礁本体2,如图1所示,可由多个环绕的垄道环2.1组成,垄道环2.1可为海洋鱼类提供良好的栖息环境和索饵场所。优选地,垄道环2.1为梯形垄道,不仅便于采捕机器人1顺利转向,还利于为海洋鱼类提供更安全的栖息场所。
50.垄道环2.1两侧的顶部设置有挡板,挡板的下方设置有电缆管道,电缆管道用于固定、安装连接鱼礁本体2与中央控制平台3的电缆,该电缆包括供电电缆和信号电缆。电缆沿鱼礁本体2内侧的垄道环两侧侧壁的顶部分布。在垄道环内分布多个诱鱼灯,供电电缆与诱鱼灯的供电端连接,便于中央控制平台3向诱鱼灯供电,实现照明以及灯光诱鱼。在垄道环内还分布多个摄像头,用于获取鱼礁本体2所在区域的图像信息,中央控制平台3通过供电电缆为摄像头供电,通过信号电缆控制摄像头采集图像,并将采集到的图像信息发送至中央控制平台3,为鱼礁、海底鱼类及各种海藻的调查研究提供图像数据。
51.利用该采捕机器人1配合鱼礁本体2使用收割渔获时,首先,先使用鱼礁本体2内诱鱼灯的灯光或者诱饵使海参或者鱼虾类海洋动物从栖息的密闭的鱼礁空间向开放的空间迁移,然后,中央控制平台3通过推进器驱动采捕机器人1游至鱼礁本体2垄道环处,采捕机器人1在水下零浮力的时候调整位置对正垄道环后沉底,停止推进器,浮力层本体进水,使采捕机器人1形成负浮力,驱动履带组件使采捕机器人1沿着垄道环爬行,采捕机器人1两边的刷子1.5开始旋转,将海底的海洋动物等渔获扫起来,开启吸鱼泵1.6,通过吸鱼管1.7将海参或者鱼虾类海洋动物等渔获吸进渔获舱1.8内,渔获舱1.8收满后回收采捕机器人1到中央控制平台3上,实现智能收割鱼获。
52.另外,人们还可充分利用采捕机器人1的监测数据,开展环境影响跟踪监测,发挥海洋环境监测的服务保障,实施生态环境保护与修复,确保海洋生态面积不减少、生态不恶化。
53.虽然上面结合本实用新型的优选实施例对本实用新型的原理进行了详细的描述,本领域技术人员应该理解,上述实施例仅仅是对本实用新型的示意性实现方式的解释,并非对本实用新型包含范围的限定。实施例中的细节并不构成对本实用新型范围的限制,在
不背离本实用新型的精神和范围的情况下,任何基于本实用新型技术方案的等效变换、简单替换等显而易见的改变,均落在本实用新型保护范围之内。