1.本发明涉及深海摄像技术领域,具体涉及一种深海摄像系统姿态调节与定高控制装置。
背景技术:
2.海洋约占地球表面积的70%,蕴藏着人类取之不尽的资源和能源,尤其是深海区域,在这里有待开发的海底矿产、待研究的水下生命、待调查的海洋环境以及待部署的国防区域。当前在深海海底探测研究工作中,深海摄像已经成为一种十分重要的手段,作为一种新型地质调查手段,通过深海摄像可以更加直观的观测海床地形地貌,对于海床地貌调查、海底矿产资源普查具有重要作用。
3.目前的深海摄像系统姿态调节装置完全无动力源,主要是通过母船进行拖曳作业。随着深海调查的不断深入,对深海摄像系统姿态调节装置的数据质量也提出了更高的要求。受海底洋流及母船升沉运动的影响,深海摄像系统姿态调节装置的姿态在作业过程中会不断变化,严重影响了数据采集质量。此外,由于海底地形起伏不定,为了保证系统定高航行,需要不断地通过人为收放绞车,以防止系统受到撞击,这也极大地增加了作业难度。
技术实现要素:
4.本发明针对现有技术中存在的缺陷,提出一种深海摄像系统姿态调节与定高控制装置,通过主被动姿态调节机构的设计,实现对深海摄像系统姿态调节与定高控制装置稳定的姿态调节,提高数据采集质量。
5.本发明是采用以下的技术方案实现的:一种深海摄像系统姿态调节与定高控制装置,包括框架和电子舱,电子舱通过舱体固定架和舱体连接杆固定在框架上,电子舱中安装有主控板与姿态传感器,框架上还固定安装有高度计,照相机,照明灯,摄像头和深度计,深度计用以实时监控摄像系统的工作深度,高度计实时监控系统的离底高度,深度计和高度计与电子舱相连,以将采集的信号传输至主控板,所述摄像系统还包括俯仰姿态调节机构,俯仰姿态调节机构左右对称安装框架的两侧,包括主动姿态调节机构与被动姿态调节机构;
6.所述主动姿态调节机构包括侧翼和电机,电机安装在框架上,侧翼的一侧通过连接件21和传动轴与电机的输出轴相连,在电机驱动下带动侧翼旋转,实现主动姿态调节;
7.所述被动姿态调节机构安装于主动姿态调节机构侧翼本体上开设的安装槽内,包括下俯襟翼、上仰襟翼、滑轨、滑块、支撑杆和连杆,下俯襟翼和上仰襟翼相对安装在安装槽的两侧,且下俯襟翼和上仰襟翼通过支撑杆与侧翼铰接连接,下俯襟翼和上仰襟翼围绕铰接点转动;所述滑轨通过支撑杆固定在安装槽内,滑块套设在滑轨上并沿其滑动;滑轨位于下俯襟翼和上仰襟翼之间,下俯襟翼和上仰襟翼通过连杆与滑块铰接连接,随深海摄像系统姿态调节与定高控制装置俯仰姿态的变化,滑块在重力作用下沿滑轨的左右滑动,通过
连杆带动下俯襟翼与上仰襟翼旋转,基于下俯襟翼和上仰襟翼产生的力矩实现被动姿态调节。
8.进一步的,所述框架上还安装有液压泵站和定高调节机构,定高调节机构包括由液压泵站控制翼型的可变翼,可变翼安装在框架的两侧,与侧翼共同保持摄像系统平衡及稳定;
9.所述可变翼包括上油囊,翼板和下油囊,上油囊和下油囊固定安装在翼板上。
10.进一步的,所述上油囊的上表面外形与下油囊的下表面外形均采用naca0012翼型曲线,上油囊的下表面外形与下油囊的上表面外形均为平面。
11.进一步的,所述侧翼与电机之间还连接有连接件和联轴器,连接件固定安装在侧翼下方,连接件与传动轴相连,传动轴通过联轴器与电机的输出轴相连。
12.进一步的,所述滑轨的底部两端设有用以限制滑块的滑动范围的限位凸起。
13.进一步的,为防止产生的力矩影响襟翼被动姿态调节效果,所述连杆的中间镂空。
14.与现有技术相比,本发明的优点和积极效果在于:
15.本方案通过对被动姿态调节机构与主动姿态调节机构的结合,实现了对系统俯仰姿态的主被动调节;通过定高调节机构,实现了对系统离底高度的自适应定高控制。通过以上两种手段,极大地提高了系统的作业效率、运动稳定性及数据采集质量,结构设计巧妙,控制方便,具有较高的推广应用价值。
附图说明
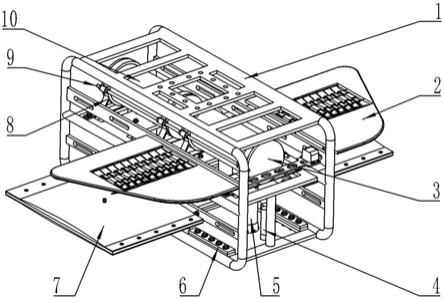
16.图1为本发明实施例1所述深海摄像系统姿态调节与定高控制装置的第一整体结构示意图;
17.图2为本发明实施例1所述深海摄像系统姿态调节与定高控制装置的第二整体结构示意图;
18.图3为图1中俯仰姿态调节机构结构示意图;
19.图4为本发明实施例被动姿态调节结构原理示意图;
20.图5为本发明实施例深海摄像系统姿态调节与定高控制装置下俯角度过大时的被动姿态调节机构工作原理示意图;
21.图6为本发明实施例深海摄像系统姿态调节与定高控制装置上仰角度过大时的主动姿态调节机构工作原理示意图;
22.图7为本发明实施例高度调节机构可变翼工作原理示意图(增大系统离底高度);
23.图8为本发明实施例2俯仰姿态调节流程示意图;
24.图9为本发明实施例2定高控制流程示意图。
具体实施方式
25.为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图及实施例对本发明做进一步说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开的具体实施例。
26.实施例1,本实施例提出一种深海摄像系统姿态调节与定高控制装置,如图1和图2
所示,包括框架1,俯仰姿态调节机构2,液压泵站3,定高调节机构7和电子舱10,电子舱10中装有主控板与姿态传感器,液压泵站3和电子舱10通过舱体固定架8和舱体连接杆9固定在框架1上;框架1上还固定安装有高度计4,照相机5,照明灯11,摄像头12,配重6和深度计13,照相机5用于拍摄海底照片,摄像头12用于录制海底视频,照明灯11用于照明,深度计13用以实时监控摄像系统的工作深度,高度计4实时监控系统的离底高度,深度计13和高度计4与电子舱10相连,以将采集的信号传输至主控板;
27.俯仰姿态调节机构2左右对称安装于摄像系统中前部,包括主动姿态调节机构与被动姿态调节机构:
28.如图3所示,所述主动姿态调节机构包括侧翼14和电机23,电机为防水伺服电机,电机23通过电机支架22固定安装在框架1上,侧翼14的一侧通过连接件21、联轴器24和传动轴25与电机23相连,在电机23驱动下,并通过联轴器24、传动轴25及连接件21的配合带动俯仰姿态调节机构2旋转,实现主动姿态调节;
29.所述被动姿态调节机构安装于主动姿态调节机构侧翼14本体上开设的安装槽内,参考图3和图4,被动姿态调节机构包括下俯襟翼15、上仰襟翼19、滑轨16、滑块17、支撑杆18和连杆20,,下俯襟翼15和上仰襟翼19相对安装在安装槽的两侧,且下俯襟翼15和上仰襟翼19通过支撑杆18与侧翼14铰接连接,下俯襟翼15和上仰襟翼19可围绕铰接点转动,所述滑轨16通过支撑杆18固定在安装槽内(比如,通过4根支撑杆18固定,支撑杆中心线对称分布于侧翼安装槽中心面内),且滑轨16上设置可沿其左右滑动的滑块17,所述滑轨16位于下俯襟翼15和上仰襟翼19之间,且下俯襟翼15和上仰襟翼19通过连杆20与滑块17铰接连接,滑块17沿在重力作用下滑轨16左右滑动,通过连杆20带动下俯襟翼15与上仰襟翼19旋转,通过襟翼产生的力矩实现被动姿态调节。
30.继续参考图1,所述定高调节机构7采用可变翼,可变翼翼型有液压泵站3控制,可变翼通过螺纹杆对称安装于框架1的中下部,如图7所示,可变翼包括上油囊26,翼板27和下油囊28,上油囊26和下油囊28通过销钉固定安装在翼板27上。液压泵站3固定安装于框架1上部,包括电机、泵、阀组、管路、油路块、流量计等(液压泵站为现有成熟技术,图中未单独示意),通过液压泵站3可实现上油囊和下油囊中往复倒油。
31.本实施例中,所述滑轨16的底部两端设有限位凸起(图4),用以限制滑块17的滑动范围;滑块17中部对称穿过滑轨16,两侧连杆20的长度相同,两侧襟翼的尺寸相同,以保证下俯襟翼15与上仰襟翼19分别在进行相应的姿态调节时具有相同的张合角度,从而确保具有对等的姿态调节效果;另外,为防止产生的力矩影响襟翼被动姿态调节效果,连杆20的中间镂空;通过限制滑块17与连杆20之间的转动副角度及连杆20与襟翼之间的滑动副距离来限制襟翼的张合角度。
32.其中,需要强调的是,所述上油囊26与下油囊28均为特制液压油囊,其中,上油囊26的上表面外形与下油囊28的下表面外形均采用naca0012翼型曲线,上油囊26的下表面外形与下油囊28的上表面外形均为平面。通过调节内部液压油的体积可改变特制油囊外形,从而产生竖直方向上的升力(利用飞机机翼的工作原理),实现对深海摄像系统姿态调节与定高控制装置工作高度的自主调节。
33.下面对本摄像系统的工作原理做进一步的说明:
34.设定深海摄像系统姿态调节与定高控制装置期望的俯仰角范围,由姿态传感器实
时监测系统的俯仰角,如图5所示,在被动姿态调节机构的有效调节范围内,被动姿态调节机构襟翼受到的流体阻力可以分解为竖直方向上的分力和平行于襟翼翼板的分力,竖直方向上的分力产生的俯仰力矩实时调节系统俯仰角,从而保证深海摄像系统姿态调节与定高控制装置稳定工作;当姿态传感器检测到系统俯仰角度超过被动姿态调节机构的有效调节范围时,如图6所示,以摄像系统上仰角度过大时为例,主动姿态调节机构开始工作,通过电机调节侧翼攻角,侧翼受到的流体阻力可以分解为竖直方向上的分力和平行于侧翼翼板的分力,借助竖直方向上的分力产生的俯仰力矩使系统俯仰角回归至期望范围内;由高度计实时监测系统离底高度,如图7所示,当控制系统判定需要调节系统离底高度时,通过液压泵站调节特制上油囊与特制下油囊体积,利用飞机机翼的工作原理产生竖直方向上的升力,实现对深海摄像系统姿态调节与定高控制装置工作高度的自主调节。
35.实施例2,如图8和图9所示,本发明还公开了一种深海摄像系统姿态调节与定高控制装置控制方法,具体包括以下步骤:
36.步骤a、俯仰姿态调节:
37.(a1)通过姿态传感器实时监测摄像系统俯仰角;
38.(a2)被动姿态调节机构实时调节系统俯仰角,判断摄像系统俯仰角是否超过被动姿态调节机构的有效调节范围,如果超过,执行步骤a3;如果未超过,则继续基于被动姿态调节机构调节系统俯仰角;
39.(a3)通过主控板控制主动姿态调节机构调节系统俯仰角至期望范围内。
40.具体的,本实施例设定摄像系统俯仰角的期望范围为(
‑
θ0,θ0),其中0≤θ0<π/2,假定被动姿态调节机构对系统俯仰角的有效调节范围为(
‑
θ1,
‑
θ0)∪(θ0,θ1),其中0≤θ1<π/2,且θ1>θ0;在实际工作过程中,姿态传感器实时监测系统的俯仰角,由被动姿态调节机构对系统俯仰角进行实时的调节,即襟翼受到的流体阻力在竖直方向上的分力f产生的俯仰力矩m实时调节系统俯仰角,保证当系统俯仰角在(
‑
θ1,θ1)范围内时,被动姿态调节机构能够将系统俯仰角保持在期望范围内。
41.另外,设定侧翼俯仰角为侧翼翼板与水平面的夹角,且侧翼俯仰角的可调范围为θ
wing
(
‑
π/2<θ
wing
<π/2),以系统上仰角度过大时为例,当姿态传感器监测到系统的俯仰角θ1≤θ≤π/2时,即系统俯仰角超过了被动姿态调节机构的有效调节范围,则电机上电,通过联轴器和传动轴调节侧翼俯仰角,利用侧翼受到的流体阻力在竖直方向上的分力f产生的俯仰力矩m调节系统俯仰角,直至回归至期望范围内。
42.步骤b、定高控制调节:
43.(b1)高度计实时监测摄像系统离底高度;判断离底高度是否在期望范围内;
44.(b2)直到监测到离底高度不在期望范围内时,启动液压泵站上电,调节上油囊和下油囊体积产生升力,调节离底高度回归至期望范围内。
45.具体的,本实施例设定深海摄像系统姿态调节与定高控制装置的期望离底高度范围为(
‑
h0,h0),由高度计实时监测系统离底高度,在期望高度范围内,上油囊与下油囊中液压油体积相同;当系统实际离底高度h<h0时,液压泵站上电,将液压油从特制下油囊打入特制上油囊,基于飞机机翼工作原理产生的升力l带动系统上升,并回归至期望离底高度范围;类似的,当系统实际离底高度h>h0时,液压泵站上电,将液压油从上油囊打入下油囊,基于飞机机翼工作原理产生的升力l带动系统下降,并回归至期望离底高度范围。
46.本方案通过对被动姿态调节机构与主动姿态调节机构的结合,实现了对系统俯仰姿态的主被动调节;通过定高调节机构,实现了对系统离底高度的自适应定高控制。通过以上两种手段,极大地提高了系统的作业效率、运动稳定性及数据采集质量,实现对系统稳定性的自适应调节,提高了系统的智能化水平。
47.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。