1.本实用新型涉及搜救设备的技术领域,特别是一种水空联合人体识别搜救装置。
背景技术:
2.21世纪以来,人工智能技术迎来大发展,技术不断深入升级,形式功能各异的人工智能机器人不断问世,在工业工厂、科技研发、医院医疗、军事军工等场景下发挥越来越重要的作用,能够在某些高危场景、繁杂场景中替代人类完成多项工作。
3.在水域搜救领域,现阶段水下作业和搜救仍主要依靠人和简单的潜水设备。面对复杂且未知的水下环境,尤其是深度超过人体承受极限的深水中,搜救潜水员自身的安全保障也面临极大威胁,其搜救作业的执行非常困难,效率很低,而且成本也很高昂。
4.由于用于水域搜救的人工智能机器人的研发应用不够成熟,尤其是水下环境的特殊性使得机器人在通信和视觉方面存在较大的难题。因此在水下目标自动检测识别的应用方面,水下机器人仍然需要进一步的研究和突破。
5.公开号为cn106314729b的说明书了一种水下联合搜救机器人、搜救系统及其工作方法,其中,水下机器人包括:主体,在该主体的外壁设有动力装置,且主体的首端设有机械手;处理器模块适于通过控制动力装置以控制水下机器人水下行进,以及控制机械手实现抓取动作;所述主体的末端设有夹持端。该水下机器人、搜救系统及其工作方法能够使多水下机器人通过首尾相连构成队列的方式在水下行进,降低行进过程中的水阻,并且还降低行进过程中的电能消耗,提高水下机器人水下作业周期;但由于水下联合搜救机器人与水上pc控制端之间的距离应在数据传输距离范围内,故该水下联合搜救机器人在水下的搜寻范围会受到一定的限制。
6.公开号为cn112050790a的说明书公开了一种用于水下目标识别的装置及方法,该装置安装在水下机器人上,该装置包含电子舱和弓形支架;电子舱包含中空的圆柱形罐状舱体,舱体前端的端面上设有安装口并安装深度相机的镜头;弓形支架包含一个水平设置的横梁,以及在横梁两侧分别垂直向下设置的两个相同的侧板,横梁的长度与电子舱的端面直径相适配,两个侧板分别卡置在电子舱的圆柱形侧壁的外部两侧并与电子舱固定;弓形支架上在横梁顶部以及侧板的底部分别安装一个水下激光器。该发明主要用于增强水下机器人对水下目标的识别和跟踪,为水下机器人作业提供更多感知信息,增强了避障能力,提高了安全作业的效率。
技术实现要素:
7.本实用新型的目的在于提供一种水空联合人体识别搜救装置,通过水下机器人和空中信号中转模块的组合,提高水下机器人的作业范围,确保快速准确地发现水下的人体。
8.一种水空联合人体识别搜救装置,包括:
9.水下机器人,包括防水罩和设于防水罩外的螺旋桨,所述防水罩内设有总控模块、电源模块、由总控模块控制的电机驱动模块和水下图像采集模块;
10.空中信号中转模块,包括设有水面图像采集传输模块的多旋翼自主飞行器和搭载于多旋翼自主飞行器上的信号中转器,所述信号中转器用于信号传输中继;
11.水面浮标通信模块,与所述水下机器人通过脐带缆线连接,包括无线通信模块,所述无线通信模块用于接收所述水下机器人的总控模块输出的水下视频图像数据,并通过基于ip的无线传输协议将所述水下视频图像数据传输至所述空中信号中转模块的信号中转器;
12.岸上主机,接收所述空中信号中转模块输出的水面视频数据和中转的水下视频图像数据,对水下人体目标进行检测和识别。
13.所述水下机器人将采集到的水下视频图像数据传输给水面浮标通信模块,再由水面浮标通信模块中的无线通信模块通过基于ip的无线传输协议传输至搭载在多旋翼自主飞行器上的信号中转器,最后由信号中转器传输信号传输至岸上主机,实现对水下人体目标的检测和识别。空中信号中转模块在负责信号传输中继的同时,由多旋翼自主飞行器负责对水面视频信息的采集,并将采集的水面视频数据输出至岸上主机,实现对水面的目标进行实时的检测。
14.所述螺旋桨包括置于防水罩顶部中心的垂推螺旋桨和分别置于防水罩尾部两侧的两个水平推进螺旋桨,所述螺旋桨的外侧均安装有导流罩。采用垂推螺旋桨和水平推进螺旋桨的配合保证水下机器人在水下平稳移动;在螺旋桨外设置导流罩,使水下机器人在运行时推进更为方便与准确。
15.所述水下图像采集模块包括照明模块、设有偏转电机的摄像头和设于摄像头两侧的红外装置。所述照明模块用于在水下光线暗淡时,对摄像头进行光线补充,所述红外装置通过红外线来探测水下机器人运行前方是否有障碍物阻挡。
16.优选地,所述电源模块包括置于防水罩内总控模块两侧的两个电池管和设于电池管内的电池。采用两个电池管保证水下机器人的平衡,同时适量配重方便水下机器人在水下行动。
17.优选地,电机驱动模块包括无刷直流电机和控制电路,其中无刷直流电动机设有电子开关线路和位置传感器。所述控制电路对转子位置传感器检测的信号进行逻辑变换后产生脉宽调制pwm信号,所述pwm信号经电子开关电路控制无刷直流电机各相绕组按一定顺序工作,实现无接触式的换向。
18.所述多旋翼自主飞行器包括主机机架、设于主机机架内的主控制器和电源,所述主机机架的外侧设有多个力臂,所述力臂的外侧依次设有风叶和缓冲脚架,所述力臂上设有加速器传感器;所述主机机架设有与主控制器连接的陀螺仪。
19.本实用新型相比现有技术,其优点在于:
20.1、本实用新型可免除低效率和高风险的水下人工搜索工作,通过水下机器人在水下航拍拍摄,在视频中实时显示目标检测结果。
21.2、本实用新型通过空中信号中转模块,提高搜索的灵活性,同时实现了水面目标的识别,扩展了水下机器人识别的局限性。
附图说明
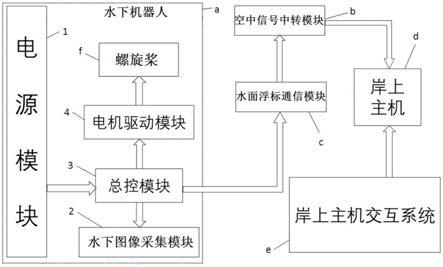
22.图1是本实用新型实施例水空联合人体识别搜救装置的系统框图。
23.图2是图1中水下机器人的结构示意图。
24.图3是图1中空中信号中转模块的结构示意图。
具体实施方式
25.如图1所示,水空联合人体识别搜救装置,包括:水下机器人a、空中信号中转模块b、水面浮标通信模块c和岸上主机d。
26.如图2所示,水下机器人a包括:防水罩11、总控模块3、电源模块1、电机驱动模块4、水下图像采集模块2和螺旋桨f。
27.总控模块3位于防水罩11内,采用的核心是beaglebone-black,beaglebone-black是基于am3359的开发组件,其拥有丰富的外设接口。beaglebone-black包括一个集成phy的高速usb 2.0 otg接口(mini usb-b型连接器)、一个集成了phy的高速usb 2.0 host接口(usb a型连接器)、一个16位色输出、支持音频输出的hdmi d type接口、一个支持24位输出、p8扩展接口引出lcd接口、一个10/100m以太网接口、一个兼容sd/mmc的tf卡接口、两个扩展接口和一个jtag接口。
28.在存储器方面,beaglebone-black拥有512m的同步动态随机存储器和可以插入的4gb的内存卡存储。
29.beaglebone-black需5v的输入电源,故其内置有处理器10,处理器10采用am3359处理器。am3358处理器集成了720-mhz的cortex-a8内核。am3359处理器是性价比最高的cortex-a8芯片,能够有效地控制水下机器人a的设计成本。
30.电源模块1包括置于防水罩11内总控模块3两侧的两个电池管和安装于电池管内的电池。采用两个电池管位于防水罩11的两侧可保证水下机器人a的平衡,同时适量配重方便水下机器人a在水下行动。
31.电机驱动模块4包括无刷直流电机和控制电路,其中无刷直流电动机设有电子开关线路和位置传感器,控制电路对转子位置传感器检测的信号进行逻辑变换后产生脉宽调制pwm信号,pwm信号经电子开关电路控制无刷直流电机各相绕组按一定顺序工作,实现无接触式的换向。
32.无刷直流电动机是一种自控变频的永磁同步电动机,其利用电子开关线路和位置传感器来代替电刷和换向器,使无刷直流电动机既具有直流电动机的特性。又具有交流电动机结构简单、运行可靠、维护方便等优点;它的转速不再受机械换向的限制,若采用高速轴承,还可以在高达每分钟几十万转的转要中运行。
33.水下图像采集模块2包括照明模块6、设有偏转电机的摄像头21和设于摄像头21两侧的红外装置7。
34.摄像头21采用widecam f100摄像头,其有1080p全高清cmos图像传感器配置,在相对浑浊的水下取景也能得到较为清晰图像。
35.照明模块6采用led照明装置,当水下光线暗淡时,用于对摄像头21进行光线补充。
36.红外装置7采用红外发光二极管,通过红外线来探测水下机器人a运行前方是否有障碍物阻挡。
37.螺旋桨f包括垂推螺旋桨5和水平推进螺旋桨9。
38.垂推螺旋桨5置于防水罩11顶部中心处,两个水平推进螺旋桨9分别置于防水罩11
尾部的两侧,垂推螺旋桨5和水平推进螺旋桨9的外侧均安装有导流罩12。采用垂推螺旋桨5和水平推进螺旋桨9的配合保证水下机器人a能在水下平稳移动;设置导流罩使水下机器人a在运行时推进更为方便与准确。
39.如图3所示,空中信号中转模块b包括四旋翼自主飞行器,四旋翼自主飞行器包括主机机架13、固定于主机机架13内的主控制器14和电源15,主机机架13的外侧固定有四个力臂16,力臂16的外侧依次设有风叶17和缓冲脚架18,力臂17上设有加速器传感器19。
40.主机机架13还设有与主控制器14连接的陀螺仪20,陀螺仪20采用mpu6000三轴陀螺仪,mpu6000三轴陀螺仪为在同一时间内测量六个不同方向的加速、移动轨迹以及位置的测量装置。
41.主控制器14采用apm2.8,主控制器14集成有主控制线路23。主控制器14通过主控制线路23控制四旋翼自主飞行器的电机转速,并将mpu6000三轴陀螺仪和加速器传感器19测量的模拟量转化为数字量输出至主控制器14。
42.主控制器14结合精密pid算法,调节脉冲占空比,从而控制四个风叶17在不同角度的转速,改变升力的变化,达到控制四旋翼自主飞行器的姿态和位置的目的。
43.主机机架13上设有水面图像采集传输模块21和照明装置22。当光线暗淡时,照明装置22用于对水面图像采集传输模块21进行光线补充。
44.四旋翼自主飞行器上还搭载有信号中转器24,信号中转器24用于信号传输中继。
45.水面浮标通信模块c,与水下机器人a通过脐带缆线连接,包括无线通信模块,无线通信模块用于接收总控模块3输出的水下视频图像数据,通过基于ip的无线传输协议将水下视频图像数据传输至信号中转器24。
46.岸上主机d,采用岸上主机交互系统e,接收水面图像采集传输模块21输出的水面视频数据和信号中转器24中转的水下视频图像数据,对水下人体目标进行检测和识别。
47.水下机器人a将采集到的水下视频图像数据传输给水面浮标通信模块c,再由水面浮标通信模块c中的无线通信模块通过基于ip的无线传输协议传输至搭载在四旋翼自主飞行器上的信号中转器24,最后由信号中转器24传输信号传输至岸上主机d,实现对水下人体目标的检测和识别。空中信号中转模块b在负责信号传输中继的同时,由四旋翼自主飞行器负责对水面视频信息的采集,并将采集的水面视频数据输出至岸上主机d,实现对水面的目标进行实时的检测。