1.本实用新型涉及一种海道测量船,尤其涉及一种用于深远海调查测量作业的大型远洋海道测量船。
背景技术:
2.海道测量船主要用于勘测海区和航道,测量水深,探测海底底质、地貌,调查收集海流、潮汐等海岸水文资料,安装、维修助航设备和执行海洋考察等,目前国内民用及海事系统领域的海道测量船舶存在如下现状:
3.(1)缺乏适用于深远海水域的大型远洋海道测量船,船型体量较小,续航力自持力较低,抗风能力、耐波性能较差,对于南海等深远海海域恶劣环境条件的适应能力较差。
4.(2)船上调查测量功能较少,测量设备系统配置简单,测量范围有限、测量精度较差、测量能力较弱,目前主要用于港口、航道、锚地等沿海及近海较浅海域的扫测任务,缺乏适用于深远海水域的多功能、专业化测量设备及系统。
5.(3)测量设备自动化、无人化、智能化水平较低,在深远海岛礁、浅水水域和深海恶劣极端条件下执行测量任务的全方位适用能力不足。
6.(4)普遍没有动力定位系统或仅配置dp
‑
1级动力定位系统,在深远海长周期测量作业的可靠性较差。
7.因此,需要设计一种大型远洋海道测量船,用于解决现有海道专业测量船舶存在的上述技术问题。
技术实现要素:
8.本实用新型的目的在于针对上述现有技术的不足,而提供一种大型远洋海道测量船,为保障深远海长周期、恶劣环境下的海道测量、应急搜寻扫测及国际测绘交流工作的有效开展,具有良好的适航性、稳性、耐波性以及足够的续航力与自给力;通过搭载多种高性能、专业化的海洋测量设备系统,可大范围、高效率、高精度地执行各类深远海海域调查测量工作,并充分考虑作业甲板上的测量工作流程设置,满足测量设备的多点投放需求和模块化搭载使用要求;实现无人艇、无人机、无人潜器的智能化、协同化测量作业,提升在岛礁、浅水水域、深海恶劣极端条件下执行测量任务的适用能力;采用收放式减摇鳍及被动可控式减摇水舱等减摇设备,通过联合减摇控制系统确保本船在深远海海域整个航行和作业周期内均能达到较好的减摇效果;配置dp
‑
2级动力定位系统,保证了在深远海长周期“网格化”测量作业和定点测量作业过程中的测量精度、持续性和可靠性。
9.为实现上述目的,本实用新型采用的技术方案是:一种大型远洋海道测量船,采用全电力驱动型式,搭载多种高性能、专业化的海洋测量设备系统,包括有人测量艇、无人测量艇、自主式无人水下潜航器释放回收系统、拖曳式测量设备、走航式多要素测量系统、温盐深仪探测仪、水下固定安装式声学设备和测量绞车设备;所述测量船的测量作业甲板区包含尾部作业区和舷侧作业区,可满足测量设备多点投放和回收需求;所述水下固定安装
式声学设备通过船艏部吊装式附体安装在位于船舶舯前1/3船长之前的船底部;所述测量船的减摇装置采用收放式减摇鳍及被动可控式减摇水舱,能够通过联合控制系统对两类减摇设备进行智能化自动控制;所述测量船还配置dp
‑
2级动力定位系统,能够保证在深远海长周期“网格化”测量作业和定点测量作业过程中的测量精度、持续性和可靠性。
10.进一步,所述测量船主甲板以上艉部到艏部依次为测量作业甲板区、遮蔽作业区、直升机临时停降区、调测工作室区、生活居住区及艏部系泊区,主甲板以下艉部到艏部的主要机器处所依次为推进装置舱、绞车舱、减摇鳍舱、机舱辅机舱、减摇水舱、声学设备布置区、艏侧推舱及艏尖舱。
11.进一步,所述有人测量艇、无人测量艇、自主式无人水下潜航器释放回收系统、走航式多要素测量系统均布置于测量作业甲板的两舷侧,可通过测量作业甲板中后部的吊机对其进行吊放运送。
12.进一步,所述测量作业甲板中央沿纵向设有地轨,地轨上配备有电动托盘车,各类拖曳式测量设备、潜器、无人装备置于电动托盘车上,并经地轨运送至遮蔽作业区。
13.进一步,所述绞车舱内布置有测量绞车设备,包括用于温盐深探测仪ctd作业的ctd绞车、用于释放回收声速探测仪的svp绞车、用于深拖作业的光电缆绞车、用于侧扫作业的同轴缆绞车、用于地质取样和浮标收放作业的地质绞车。
14.进一步,所述绞车舱内的ctd绞车通过滑轮导缆从舷侧出舱,与吊装装置配合完成温盐深探测仪的收放及作业,其余绞车舱内的绞车配合尾部a架,用于各类拖曳式测量设备的拖曳测量作业。
15.进一步,所述拖曳式测量设备包括侧扫声呐、合成孔径、深拖系统、拖曳式信标定位仪、底质取样器等。
16.进一步,所述无人测量艇、无人测量飞机、无人水下潜航器可结合测量任务需求实现模块化方式装船,通过与海道测量船配合,实现空、海、潜立体探测系统的无人化、智能化、集群化测量作业。进一步,所述船艏部吊装式附体前端面和两侧端面的截面均为半圆形,后端面截面为带流线型的机翼形式,附体与船体间距约700~800mm,设三个挂臂与船体相连,挂臂截面为流线型机翼形式。
17.进一步,所述船艏部吊装式附体上布置有多种水下固定安装式声学设备,包括浅水单波束、深水单波束、浅水多波束、中水多波束、深水多波束、声学多普勒流剖面仪以及浅地层剖面仪。
18.进一步,所述联合减摇控制系统设于驾驶室和机舱集控室,实现对减摇鳍和减摇水舱的数字化、智能化联合控制,提升船舶的耐波性能。
19.本实用新型的有益效果是:
20.(1)测量设备系统配置实现多功能、多任务目标、模块化设计,可大范围、高效率、高精度地执行各类深远海海域调查测量工作,测量设备系统布置设计合理,并充分考虑测量工作流程设置、测量作业效率及测量效果。
21.(2)通过使用无人飞机、无人艇、水下无人潜器,实现空、海、潜立体探测系统的自动化、无人化、智能化,具备快速转场和集群化作业能力,大幅提升测量母船使命任务范围,提高在岛礁、浅水水域、深海等恶劣极端条件下测量及搜救任务的适用能力。
22.(3)配置具有冗余能力的dp
‑
2级动力定位系统,提高测量作业效率,保证在深远海
长周期测量作业过程中的测量精度、持续性和可靠性。
23.(4)采用收放式减摇鳍及被动可控式减摇水舱等减摇设备,并通过联合控制系统对两类减摇设备进行数字化、智能化控制,有效实现全航速范围的绿色节能减摇,提升船舶的耐波性能。
24.(5)采用吊装式(gondola)声学设备安装方式,能有效避免首部船底气泡层对声学设备换能器声波发射接收带来的影响,有效提升声学设备测量范围和精度,为获得可靠准确的海洋测量数据提供有力保障。
附图说明
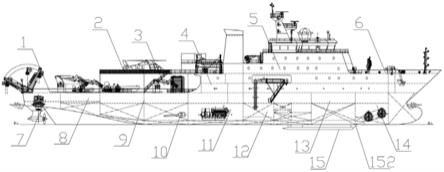
25.图1为本实用新型的大型远洋海道测量船的总布置主视图;
26.图2为本实用新型的大型远洋海道测量船的尾部测量作业甲板区布置示意图;
27.图3为本实用新型的大型远洋海道测量船的绞车舱内布置示意图;
28.图4为温盐深绞车作业示意图;
29.图5为本实用新型的大型远洋海道测量船的绞车舱内绞车经尾部a架作业示意图;
30.图6为本实用新型的大型远洋海道测量船艏部吊装式附体(gondola)外形示意图;
31.图7是本实用新型的大型远洋海道测量船艏部吊装式附体(gondola)底部示意图。
具体实施方式
32.下面结合附图和具体实施例对本实用新型作进一步说明,但不作为本实用新型的限定。
33.如图1所示,本实用新型的大型远洋海道测量船具体实施例的总长~120米,船宽21~22米,型深9.0~9.5米。主甲板以上艉部到艏部依次为测量作业甲板区1、直升机临时停降区2、遮蔽作业区3、调测工作室区4、生活居住区5及艏部系泊区6,主甲板以下从艉部到艏部的主要机器处所依次为推进装置舱7、推进电气设备及液压设备舱8、绞车舱9、减摇鳍舱10、机舱辅机舱11、减摇水舱12、声学设备布置区13及艏侧推舱14。
34.本实用新型的大型远洋海道测量船采用全电力驱动型式,可根据不同工况对电站负荷进行合理灵活分配,以适应海上各种复杂测量作业工况对船舶动力的需求,使得营运经济性较好。
35.在深远海海域的“网格化”测量作业过程中需周期性地维持一定的航向及航迹,并需根据任务需求进行定点测量作业,为提高测量作业效率,保证在深远海长周期测量作业过程中的测量精度、持续性和可靠性,本实用新型的大型远洋海道测量船配置具有冗余能力的dp
‑
2级动力定位系统,该系统由动力系统、推进器系统、动力定位控制系统及测量系统等组成。
36.本实用新型的大型远洋海道测量船测量作业甲板区1为l型,如图2所示,包含尾部作业区和舷侧作业区,可满足测量设备多点投放和回收需求。a字架101布置于船尾,用于侧扫声呐、合成孔径、深拖系统、拖曳式信标定位仪、底质取样器等各种拖曳式测量设备的释放回收作业;拖曳式测量设备不作业时则存放于遮蔽作业区3;主甲板尾部右舷侧布设有用于声速剖面测量的走航式多要素测量系统(mvp)102;两台吊机103和104布置于作业甲板中后部,吊机作业范围可涵盖作业甲板测量设备布置区域,主要负责测量设备终端的甲板吊
运作业;无人测量艇105、有人测量艇106、无人测量飞机集装箱107、无人水下潜航器(auv)释放回收系统集装箱108分别布置于左右舷侧,可通过吊机对其进行吊放运送;工作艇109布置于右舷侧,自带配套吊放设备。
37.无人水下潜航器(auv)可用于深水海底目标调查搜寻、拍照取证以及小型重要物件的打捞和处置作业。在行auv释放及回收作业时,先通过右舷吊机104将auv释放回收系统集装箱从右舷侧位置108吊放至尾部位置109,再从尾部将该auv通过集装箱内相应的释放回收系统进行释放入水作业和回收上船。
38.艇甲板尾部设置了直升机起降甲板2,直升机甲板2尺度及面积的设置满足旋翼直径14m以下的直升机起降要求,同时该直升机甲板可兼顾用于无人测量飞机的起降。无人测量飞机可进行海岸带、海岛、浅海地形等海洋测绘观测,起降作业前,先由吊机104将无人测量飞机集装箱107吊运至直升机起降甲板2上,无人测量飞机出箱后再进行起降作业。
39.本实用新型的大型远洋海道测量船上的无人测量艇105、无人测量飞机107、无人水下潜航器108等无人装备可结合测量任务需求实现模块化装船,在海道测量母船的支持下,实现空、海、潜立体探测系统的无人化、智能化,具备快速转场和集群化作业能力,大幅提升测量母船使命任务范围,提高在岛礁、浅水水域、深海等恶劣极端条件下测量及搜救任务的适用能力。
40.测量作业甲板区1中央沿纵向设有地轨111,地轨上配备有电动托盘车112,该托盘车下方设有与地轨111相连的滚轮,由电机驱动可在地轨上前后移动。各类拖曳式测量设备、潜器、无人装备等测量设备可置于电动托盘车上,并经地轨运送至遮蔽作业区3,以便对上述各类测量设备进行检修、保养和储存;同时在右舷侧亦设有横向地轨113,上方布置有电动托盘车114,主要负责将温盐深探测仪(ctd)301从遮蔽作业区3运送至舷侧,进行舷侧海水取样,用于测量海洋温、盐、深、声速等要素。
41.测量作业甲板下方设置了绞车舱区9,如图3所示,布置有各类测量绞车设备,包括ctd绞车901(用于温盐深探测仪ctd作业)、svp绞车902(用于释放回收声速探测仪)、光电缆绞车903(用于深拖作业)、同轴缆绞车904(用于侧扫等作业)、地质绞车905(用于地质取样、浮标收放作业等)等大型测量绞车,均是由牵引器、存绳绞车、排缆器等组成;绞车控制间906设有绞车控制柜等电气设备。
42.ctd绞车901通过滑轮导缆从右舷舷侧出舱,与舷侧吊机110配合,完成温盐深探测仪(ctd)301的收放及作业,如图4所示。舷侧吊机110还可通过右舷侧机舱吊口115兼顾对下方机舱11内设备的起吊作业。其余绞车舱内绞车的牵引器对往向上的出缆口,绞车缆索通过绞车舱内导向滑轮907向上穿过主甲板,再经过遮蔽作业区3室内的导向滑轮302,向船艉穿过遮蔽作业区3至尾部a架101,用于各类拖曳式测量设备的拖曳测量作业,如图5所示。
43.本实用新型的大型远洋海道测量船主要航行和作业于深远海海域,海上环境条件较为恶劣,船舶在波浪中过度摇摆会明显干扰海中、海底的信号接收,影响测量设备的定位精度,也会影响船上人员工作生活的舒适性。为达到良好的耐波性能,本船设置了收放式减摇鳍舱10和被动可控式减摇水舱12。收放式减摇鳍舱位于机舱11后方,被动可控式减摇水舱位于机舱11前方,通过联合控制系统对两类减摇设备进行智能化自动控制,确保本船在整个航行和作业周期内均能达到较好的减摇效果。在停泊或低速航行作业时以减摇水舱为主进行减摇;在经济航速航行时减摇鳍和减摇水舱协同减摇;在高速航行时以减摇鳍为主,
减摇水舱辅助减摇。在驾驶室和机舱集控室均设有联合控制器,通过对减摇系统的数字化、智能化控制,可有效实现全航速范围的绿色节能减摇,提升船舶的耐波性能。
44.为避免声学设备受到船中后部主辅机、螺旋桨等的噪音及船体底部气泡层等影响,本实用新型的一种大型远洋海道测量船主要声学设备布置于船艏部1/3船长以前,同时为尽量减小航行过程中船艏底部产生的气泡对声学设备的影响,提升声学设备测量范围和精度,艏部声学设备采用吊装式(gondola)的安装方式,如图1和图6,7所示;gondola附体15尾端距离首垂线30~35米,艏部气泡通过船底与gondola附体15的间隙流向后方,从而将气泡对声学设备发射和接收测量信号的影响降至最低;为满足波束角为1
°×
0.5
°
的深水多波束纵向布置空间,gondola附体总长~20米;gondola附体上布置有多种水下固定安装式声学设备,包括浅水单波束、深水单波束、浅水多波束、中水多波束、深水多波束、声学多普勒流剖面仪(adcp)、浅地层剖面仪等;gondola附体高约700mm,前端面和两侧端面的截面均为半圆形,后端面截面为带流线型的机翼形式,以达到减阻效果;附体与船体间距约700~800mm,设三个挂臂151与船体相连,挂臂151截面为流线型机翼形式,以达到减阻效果;各类声学测量设备的信号传输管路经三个挂臂向上穿入船体,并连接至声学设备布置区13;gondola首部中间垂直于船底面处设置渔网导向板152,以防附体挂渔网、水草等水下杂物。
45.为确保船舶舱室振动噪声和水下辐射噪声控制在一定水平内,提升声学探测设备的水下测量精度、测量范围和船上人员居住工作的舒适性,本实用新型的大型远洋海道测量船除了在总体布置、船体结构、推进器设计、动力设备隔振措施、全船通风系统、空调系统、舱室隔声系统等方面作了专门的静音化设计,以降低航行和测量作业时船体水下辐射噪声和舱室振动噪声。
46.以上所述仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本实用新型说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本实用新型的保护范围内。