1.本发明涉及水下机器人领域,具体的说,涉及了一种水下联合搜救机器人及系统。
背景技术:
2.机器人在水下运行时会存在较大阻力,不仅加剧耗能而且严重阻碍运行速度。为尽可能减小水下阻力同时保证稳定性,本领域水下机器人采用不同形态外形设计来规避以上问题,按照形态一般分为流线型、鱼雷型、水滴型等。在外壳设计上,流线型水下机器人虽然大大减小了阻力但是由于侧轮廓投影面积远大于正面投影面积,侧面所受阻力将显著增大,有时达六倍以上,从而导致流线型外壳机器人因压力分布不均而不具有强劲的抗水流冲击能力。同样“水滴型”的“前尖后钝”仍会造成机器尾部压强过大,在提高机器自稳性方面优势并不明显。为了提升运行速度,也有在动力推进系统上进行规避设计,如吊舱式推进系统。然而,吊舱式推进系统虽然灵活度比较高,但是对于吊舱和桨轴的密封要求极高且传递的功率也受到一定限制,成本较高,不宜维护,故障率高。
3.另一方面,目前的水下机器人虽然可以代替人工进行长时间的作业,但是随着作业任务要求的提高,单个水下搜救机器人已经无法满足日益复杂的高强度、大负荷的作业需求而且即便是增加搜寻作业的机器人也不过是在数量上增加,各个机器人之间仍是独立工作,没有很好的统一协调调度机制。
4.为了解决以上存在的问题,人们一直在寻求一种理想的技术解决方案。
技术实现要素:
5.本发明的目的是针对现有技术的不足,一方面,提供一种阻力小、受阻力均匀、抗乱流能力强、搜寻与救援一体化、具有自主识别能力的水下联合搜救机器人;另一方面,提供了一种多个水下搜救机器人终端与空中无人机搜救终端联合组网,搜救终端之间相互通信相互配合,具备高效搜救能力的基于lora和深度学习的水下联合搜救系统。
6.为了实现上述目的,本发明所采用的技术方案是:本发明第一方面提供一种水下搜救机器人,包括外壳、密封舱、动力推进装置和控制系统;所述外壳关于质点铅锤面相对称,呈双水滴对称型;所述外壳顶部沿中心线对称开设凹槽;所述密封舱,嵌设在所述凹槽内,用于内置所述控制系统;所述动力推进装置设置于所述外壳内;所述控制系统控制连接所述动力推进装置,以控制所述动力推进装置进行动力推进。
7.基于上述,所述动力推进装置包括四个用于实现前后行进的水平推进器和两个用于实现上下浮沉的垂直推进器;所述外壳开设四条用于放置所述水平推进器的水平通道和两条用于放置推进辅助装置的垂直通道;所述四条水平通道分布在所述外壳同一水平面上,每条水平通道贯穿所述外壳的相邻两侧面并与所述外壳长边中线呈45
°
夹角;所述两条垂直通道垂直均布在所述外壳的两侧并贯穿所述外壳的顶、底面。
8.基于上述,所述外壳的前端面、后端面、左侧面、右侧面和底面设计为弧形内凹面;所述外壳的顶面的垂直通道贯穿处也设计为弧形内凹面;所述外壳前端面位于所述密封舱下部,设计有一个用于对流线进行分割的尖端结构;所述外壳后端的上方设计为类似尾翼的稳流结构。
9.基于上述,还包括与所述控制系统控制连接、基于声视觉探测搜救目标的感知装置;所述感知装置包括声呐协同探测单元、摄像单元和图像识别单元;所述声呐协同探测单元包括安装于所述外壳前、后端面,用于进行双视野交替探测的前视声呐探测器,以及安装于所述外壳左、右侧面,用于弥补前视声呐视野盲区的合成孔径声呐探测器;所述摄像单元包括水下高清摄像机和led照明灯;所述图像识别单元,分别与所述声呐协同探测单元和所述摄像单元连接,用于根据接收到的所述图像识别单元获取到的图像和所述声呐协同探测单元捕捉到的图像进行目标识别跟踪和水域情况探测。
10.基于上述,所述图像识别单元采用预置yolov5神经网络模型的jetson nano模块。
11.基于上述,所述控制系统还连接有用于监测机器人水下姿态的姿态监测模块,以及用于实时检测搜救机器人水下作业深度的水深计。
12.基于上述,还包括救援装置,所述救援装置包括设置于所述外壳左、右两侧的搜救机械臂和设置于所述搜救机械臂上的逃生装置;所述搜救机械臂包括环形机械爪、连杆、曲柄和舵机;所述舵机,由所述控制系统控制驱动,安装在所述外壳上,与所述曲柄连接;所述连杆的一端连接所述曲柄,另一端连接所述环形机械爪,设计为只在水平方向上具有自由度,在所述舵机的驱动下,完成抓握或打开动作;所述逃生装置包括感应模块、气体发生器及逃生气囊;所述感应模块,设置于所述环形机械爪上,与所述控制系统电连接,用于检测所述机械臂是否抓牢并反馈给所述控制系统;所述气体发生器与所述控制系统电连接,当所述感应模块检测到机械臂抓牢信号后,所述控制系统触发所述气体发生器动作;所述气体发生器设置于所述环形机械爪爪部内,用于产生气体充装所述逃生气囊;所述逃生气囊覆盖在所述环形机械爪表面上,用于产生向上的浮力。
13.基于上述,所述密封舱包括半球罩、法兰盘和密封舱体,所述半球罩通过法兰盘密封安装在所述密封舱体的前端,所述密封舱体的后端与设置在所述凹槽内的法兰盘连接。
14.本发明第二方面提供一种水下联合搜救系统,包括由多个所述的水下联合搜救机器人联合组网的搜救机器人编队、空中无人机和云管理调度平台;所述搜救机器人编队的水下联合搜救机器人内置北斗定位模块;所述搜救机器人编队的联合组网方式包括:各个水下联合搜救机器人通过零浮力线缆与水面对应的信号浮标相连接,各个信号浮标之间使用无线通信技术组建局域网进行数据交互,并通过无线网关与云管理调度平台进行通信连接;所述水下联合搜救系统的搜救方法:首先由空中无人机在空中进行初步的筛查搜寻目标;在初步筛查缩小目标范围后,由水下联合搜救机器人在探测区域内搜寻目标;在搜寻到目标人员后,云管理调度平台根据上报上来的水域情况和目标位置,云管理调度平台规划搜寻路径和救援任务并下发,各水下联合搜救机器人再根据接收到的搜寻路径和救援任务进行跟踪和救援。
15.基于上述,各个信号浮标之间使用lora通信技术组建局域网进行数据交互,并通过lora网关与云管理调度平台进行通信连接;所述lora网关使用rf器件。
16.本发明相对现有技术具有突出的实质性特点和显著进步,具体的说,在综合考虑到流线型与水滴型外壳设计的优缺点后,设计了一款关于质点铅锤面相对称的“双水滴对称型”外壳结构,从而实现了水下联合搜救机器人受水流阻力小、受阻力均匀、抗乱流能力强的效果;水下联合搜救机器人内置了jetson nano自主识别模块具备了自主识别能力,解决了传统搜救方式及现有机器人存在的识别准确度和识别速度不能兼顾的问题;此外水下联合搜救机器人两侧安装了所述救援机械臂从而达到了搜寻与救援一体化的效果。
17.另一方面,采用lora无线通信技术构建搜救局域网实现多机组网,便于信息在各个水下搜救机器人终端之间流通,同时在搜寻的不同阶段采用不同措施,在远距离时依赖空中无人机搜救终端协同搜救方式缩小搜救范围,较小范围内采用水下搜救机器人终端多机组网形式搜救,并由云管理调度平台实现统一管理,系统之间分工明确,效率更高,从而提供了一种具有高效搜救能力的基于lora和深度学习的水下联合搜救系统。
附图说明
18.图1是本发明水下搜救机器人的整体结构示意图。
19.图2是本发明水下搜救机器人的另一个整体结构示意图。
20.图3是本发明水下搜救机器人的内部结构示意图。
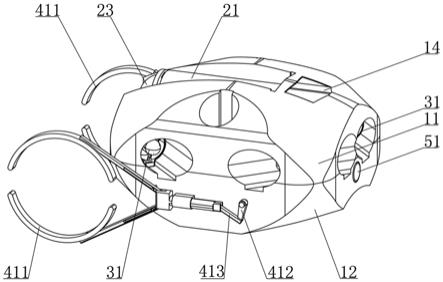
21.图4是本发明水下搜救机器人的俯视结构示意图。
22.图5是本发明水下搜救机器人的仰视结构示意图。
23.图6是本发明水下搜救机器人的另一个内部结构示意图。
24.图7是本发明水下搜救机器人的外壳表面压强及流线分布情况示意图。
25.图8是本发明水下搜救机器人的外壳表面压强及流线分布情况另一个角度的示意图。
26.图9是本发明水下联合搜救系统的系统框图。
27.图10是本发明水下搜救机器人的环形机械爪爪部的结构示意图。
28.图中:1、外壳;11、上外壳;12、下外壳;13、尖端结构;14、稳流结构;2、密封舱;21、密封体;22、法兰盘;23、半球罩;24、法兰盘;31、水平推进器;32、垂直推进器;41、搜救机械臂;411、环形机械爪;412、曲柄;413、连杆;421、逃生气囊;422、感应模块;424、气体发生器;51、前视声呐探测器。
具体实施方式
29.下面通过具体实施方式,对本发明的技术方案做进一步的详细描述。
30.实施例1本实施例提供了一种水下搜救机器人,如图1、图2所示,包括外壳1、密封舱2、动力推进装置、救援装置、感知装置和控制系统;所述外壳1关于质点铅锤面相对称,呈双水滴对称型,其中,前端面、后端面、左侧面、右侧面和底面设计为弧形内凹面;所述外壳1顶部沿中心线对称开设凹槽;所述密封舱2,嵌设在所述凹槽内,用于内置所述控制系统;所述动力推进装置设置于所述外壳1内;所述控制系统控制连接所述动力推进装置,以控制所述动力推
进装置进行动力推进;所述救援装置包括设置于所述外壳1左、右两侧的搜救机械臂41和设置于所述搜救机械臂41上的救援生气囊421;所述感知装置与所述控制系统控制连接,基于声视觉探测搜救目标。所述控制系统包括控制电路、处理器、中继器、驱动器和供电电路等。
31.外壳设计本实施例的外壳1在综合考虑到流线型与水滴型外壳设计的优缺点后,如图1、图4、图5采用质点铅锤面相对称的双水滴对称型外壳结构设计,具体包括上外壳11和下外壳12,所述外壳1的前端面、后端面、左侧面、右侧面和底面设计为弧形内凹面;所述上外壳11的顶面的垂直通道贯穿处也设计为弧形内凹面。在“水滴型”外形设计的基础之上,充分平衡前端水流压强和机器尾部压强,使得在水平方向或近似水平方向上来自任意方向的水流所产生的阻力一致,具有很好的抗乱流能力。
32.图7、图8为进行58次仿真迭代运算后,机器人在1个大气压强的水深环境下以4m/s的速度运行时其表面压强及流线情况,可以看出,即使在高速运行并考虑到机械臂本身并不是流体动力外壳1一部分的情况下,其前后端的压强也基本一致,也就是说,机器人即使在高速运行情况下也几乎与静态条件下保持一致,大大增强了其在复杂深水域作业时的稳定性。不仅如此,考虑到实际情况下海流等多种不稳定性因素的干扰,本实施例中所述外壳1前端面位于所述密封舱2下部,设计有一个用于对流线进行分割的尖端结构13,在保证外壳1受压不超阈值的情况下进行一定程度上的稳流,还有利于密封舱内的视野捕捉。同时,在所述外壳1后端的上方,参考f1方程赛车的空气动力学设计并结合水下作业环境下的实际情况,设计有一个类似尾翼的稳流结构14。
33.具体的受力分析过程如下:无粘性流体对于剪切变形没有抗拒能力和静止流体不能承受剪应力表明:在无粘性流体或静止流体中,剪应力为零,而正应力(即法向应力)p
xx
=p
yy
=p
zz
=-p(p称为无粘性流体或静止流体的压力函数,它表征无粘性流体或静止流体在任一点的应力状态)。在流体动力学中可以用p
x
、p
y
、p
z
或九个量p
ij
(i,j=1,2,3)的组合描写一点的应力状态(p
ij
组成的二阶张量称为应力张量)。
34.更进一步,牛顿粘性定律 ,只适用于剪切流动。对于一般的流动,假设:(1)运动流体的应力张量在运动停止后趋于静止流体的应力张量,于是式中p
ij
为应力张量;p为压力;δ
ij
为克罗内克符号;为偏应力张量;(2)偏应力张量的各分量是速度梯度张量各分量的线性齐次函数;(3)流体是各向同性的。
35.由此可以推出应力张量p
ij
和变形速率张量s
ij
的关系:通过对多次迭代后得出的模型进行分析,发现应力张量p
ij
和其与变形速率张量s
ij
在关系上有着相对最优解,并且还能利用空间对称特征进一步优化出更优解,结果优于
目前主流的流线型设计。
36.动力推进装置如图3、图6所示,所述动力推进装置包括四个用于实现前后行进的水平推进器31和两个用于实现上下浮沉的垂直推进器32;所述外壳1开设四条用于放置所述水平推进器31的水平通道和两条用于放置推进辅助装置的垂直通道;所述四条水平通道分布在所述外壳1同一水平面上,每条水平通道贯穿所述外壳1的相邻两侧面并与所述外壳1长边中线呈45
°
夹角;所述两条垂直通道垂直均布在所述外壳1的两侧并贯穿所述外壳1的顶、底面。具体的,为了方便推进器的安装及位置调整,所述水平通道和所述垂直通道内开设有滑槽,所述水平推进器31和所述垂直推进器32对应滑设固定在滑槽内。
37.本实施例的动力推进装置共包括6个推进器,使整个机器人具有强劲的动力来快速到达目标位置以及对抗波浪等。由于机器人的工作范围主要是水域的底部,所以主体部分采取水平分布的4个水平推进器31,以适应水平运动,通过转动方式的配合可以快速的完成进退、转向和平动等运动状态的切换,保证机器人可以快速响应,到达指定救援作业区域,展开自主搜救工作。具体的,控制系统控制四个水平推进器31正反转可以使其带动机器人进行前进或后退,其中左右两侧水平推进器31旋转方向不同时即可完成转向动作,当位于对角线的水平推进器31旋转方向相同而相邻的旋转方向不同时,可以控制机器人自身进行左右平动;在垂直运动过程中,垂直方向上安装的2个垂直推进器32能够实现沉浮功能,还能在辅助机器人自稳的同时,对救援作业进行辅助。
38.感知装置所述感知装置包括声呐协同探测单元、摄像单元和图像识别单元;所述声呐协同探测单元包括安装于所述外壳1前、后端面,用于进行双视野交替探测的前视声呐探测器51,以及安装于所述外壳1左、右侧面,用于弥补前视声呐视野盲区的合成孔径声呐探测器;所述摄像单元包括水下高清摄像机和led照明灯;所述图像识别单元,分别与所述声呐协同探测单元和所述摄像单元连接,用于根据接收到的所述图像识别单元获取到的图像和所述声呐协同探测单元捕捉到的图像进行目标识别跟踪和水域情况探测。
39.本实施例采用声视觉结合的方法完成在浑浊水域对大范围水域情况的综合判断以及对目标的高精度识别。
40.(1)基于声视觉的目标检测在较远距离采用基于声觉的声呐技术探测缩小可疑范围,提高识别效率,在目标的近距离范围内采用基于视觉的摄像技术获取水域图像,提高识别精度。
41.在较远范围内,为实现全方位的目标探测,设计了前视声呐探测器51与合成孔径声呐探测器进行协同探测。前视声呐探测器51通过双角度发射技术,进行60
°
与90
°
双视野交替探测,采集机器人前下方及后下方的图像数据,同时实现自主避障。合成孔径声呐探测器采集左右两侧下方的海底图像,弥补前视声呐探测器51的视野盲区;合成孔径声呐为水下二维成像声纳,通过小孔径基阵的移动以及对不同位置接收信号的相关处理来获得移动方向(方位方向)上大的合成孔径,根据合成孔径越大,分辨率越高的原理,采用不随距离的增大而变宽的宽波束使目标点被多个发射波束照射到,进而对回波信号进行相干累加,实现大孔径的合成,即:随着距离增大,合成孔径长度会越长,合成阵的角分辨率就越高,从而抵消了距离增大的影响,保持了高分辨力不变,作用距离能达到400m,分辫率能达到10cm,
大大提高远距离识别的精度。在近距离范围内,采用由水下高清摄像机与led照明灯完成目标探测。
42.本实施例采用多种目标探测技术协调作业的方式,利用不同探测方式的适应范围弥补了单一系统存在的缺陷,实现在多范围内全方位的高精度目标识别和水域情况探测。
43.(2)图像识别图像识别由改良过的yolo系列的yolov5神经网络完成,模型更加轻量化,网络结构更加灵活,在识别速度满足实时性的需求下,还兼顾了较高的准确度。
44.每个机器人在获取到图像识别单元的图像和声呐协同探测单元捕捉到的图像后,经由yolov5卷积神经网络进行特征提取分析,具体包括目标分割、目标识别、目标检测及目标跟踪,最终实现对水域情况的综合判断和目标的高精度识别,该过程可以由每个机器人搭载的jetson nano模块自主完成。jetson nano体积小巧,性能强大,可以提供高达472 gflops的浮点运算能力,而且耗电量仅为5w。
45.其它感知装置本实施例中,所述控制系统还可以连接有用于监测机器人水下姿态的姿态监测模块,以及用于实时检测搜救机器人水下作业深度的水深计。具体的,所述姿态监测模块采用mpu9250九轴传感器。
46.1)、mpu9250九轴传感器实时监测机器人的姿态,防止因水流冲击和自旋等原因造成航线偏差;2)、水下各项参数随深度的变化具有非线性的特点,使用高精度水深计实时检测水下搜救机器人的作业深度,以便和设定的有效工作深度及时比对,了解作业深度,避免压强过大而造成意外事故,同时在设定的深度范围内进行有效的搜索。
47.救援装置本实施例的所述救援装置包括设置于所述外壳1左、右两侧的搜救机械臂41和设置于所述搜救机械臂41上的逃生装置;所述搜救机械臂41实现对搜寻目标的固定,如图10所示,在所述搜救机械臂41扣合时通过主要由所述逃生装置促使所述搜救机械臂41上覆盖安装的所述逃生装置中的逃生气囊快速被充气,包裹住搜寻目标,同时通过所述逃生装置中的逃生气囊体积膨胀所产生的浮力将搜寻目标带离水面。
48.具体的,所述搜救机械臂41包括环形机械爪411、连杆413、曲柄412和舵机;所述舵机,由所述控制系统控制驱动,安装在所述外壳1上,与所述曲柄412连接;所述连杆413的一端连接所述曲柄412,另一端连接所述环形机械爪411,设计为只在水平方向上具有自由度,在所述舵机的驱动下,完成抓握或打开动作。
49.动作时,由所述舵机带动曲柄412,在所述连杆413只有一个自由度的情况下带动所述环形机械爪411,顺时针旋转可以使所述环形机械爪411打开,逆时针旋转可以使所述环形机械爪411抓握,使所述搜救机械臂41具有进行救援作业的能力。其中,所述舵机带动所述曲柄412旋转后,所述曲柄412带动所述曲柄连杆413,由于所述连杆413只在水平方向上具有自由度,因此会被所述曲柄412拉动或推动,在所述环形机械爪411也被限制自由度的情况下,所述连杆413继续带动所述环形机械爪411,从而完成抓握或打开动作。
50.如图10所示,所述逃生装置包括感应模块422、气体发生器424及逃生气囊421;所述感应模块422设置于所述环形机械爪411末端,与所述控制系统电连接,用于检测所述机
械臂41是否抓牢并反馈给所述控制系统;所述气体发生器424与所述控制系统电连接,当所述感应模块检测到机械臂抓牢信号后,所述控制系统触发所述气体发生器424动作;所述感应模块422可以为压力传感器;所述气体发生器424设置于所述环形机械爪411爪部内,用于产生气体充装所述逃生气囊421;所述逃生气囊421覆盖在所述环形机械爪411表面上,用于产生向上的浮力;所述逃生气囊421可以为柔性材料膨胀包覆;所述逃生装置分布于机械爪内,在机器两侧各有一个完全相同的逃生装置。
51.具体的,当舵机堵转、所述机械臂抓牢后,压力传感器检测到由于抓牢搜寻目标产生的压力,反馈压力信息给所述控制系统,所述控制系统触发所述气体发生器内装置的叠氮化钠分解,开始释放气体,在气体达到一定压强的情况下,柔性材料膨胀包覆被搜寻目标的胳膊夹持,起到支撑固定作用,同时柔性材料膨胀包覆因内压增高而体积膨胀,浮心位置发生偏移,且与抓住搜寻目标后的重心位置改变相似,这样,在保证搜寻目标与机器整体重心处于一个合理位置的情况下,搜寻目标与机器进行上浮,将搜寻目标带离水面。
52.密封舱所述密封舱2包括半球罩23、法兰盘22、法兰盘24和密封舱体21,所述半球罩23通过法兰盘22密封安装在所述密封舱体21的前端,所述密封舱体24的后端与设置在所述凹槽内的法兰盘24连接。
53.本实施例的水下救援机器人,在视觉和声呐探测的基础上,确定目标位置后,在6个推进器的运转下到达预定作业位置,对目标进行救援抓取,并通过逃生气囊421及两个垂直推进器32的辅助下快速浮至水面以上,携带目标脱离水下。
54.实施例2本实施例提供一种水下联合搜救系统,如图9所示,包括由多个实施例1所述水下联合搜救机器人联合组网的搜救机器人编队、空中无人机和云管理调度平台;所述搜救机器人编队的水下联合搜救机器人内置北斗定位模块;所述搜救机器人编队的联合组网方式包括:各个水下联合搜救机器人通过零浮力线缆与水面对应的信号浮标相连接,各个信号浮标之间使用lora通信技术组建局域网进行数据交互,并通过lora网关与云管理调度平台进行通信连接;所述水下联合搜救系统的搜救方法:首先由空中无人机在空中进行初步的筛查搜寻目标;在初步筛查缩小目标范围后,由水下联合搜救机器人在探测区域内搜寻目标;在搜寻到目标人员后,云管理调度平台根据上报上来的水域情况和目标位置,云管理调度平台规划搜寻路径和救援任务并下发,各水下联合搜救机器人再根据接收到的搜寻路径和救援任务进行跟踪和救援。
55.本实施例采用多个机器人联合组网即多机组网编队并与空中无人机协同工作的形式,共同完成对目标的搜寻及位置确定。机器人之间通过lora无线通信技术实现数据交互,在执行任务时相互配合,系统组成和传感器配置可以实现冗余。
56.进行搜救时,无人机在空中可极大的扩展视野面积,进行初步的筛查搜寻,缩小机器人的作业范围,不仅能降低搜寻成本还可极大提高搜寻效率,在初步筛查缩小目标范围后,机器人可在探测区域内分布于不同的空间位置,每一个机器人都是一个微型集成式搜
救系统,具有自主搜救能力。在搜寻到目标人员后,将水域情况和目标位置上报至云管理调度平台,各机器人再根据下发的路径规划对目标进行跟踪并固定,展开救援。
57.基于本实施例系统采用多机协调工作的形式,选用构建基于lora无线通信技术的通信网络实现各机器人个体之间的信息交流传递,使信息可以在机器人内部不同功能的模块之间流通,协调工作,然后将数据统一汇总于lora网关将数据转换为tcp/ip的格式发送到云管理调度平台,lora网关作为一个透明网桥在终端设备和中心网络服务器间中继消息,用于远距离星型架构,同时调节多信道、多调制收发。具体的,lora网关可以使用不同于终端节点的rf器件,从而能够在同样的功耗条件下比其他无线方式传播的距离扩大至3
‑
5倍,实现了低功耗和远距离的统一。
58.本实施例采用北斗系统进行精准定位。除了在搜寻到目标后,在图像识别的基础上对目标进一步精准定位,并通过对自身位置的精准定位,及时将准确的救援信息发送给云管理调度平台。还可以在发生意外事故时,对失事设备精准定位,及时打捞回收,从而对事故原因分析,进一步改进设备。且在面对水下大范围搜救可能存在的网络及通讯不便,北斗系统的短报文通信功能具有巨大优势,在没有通信和网络的地方,可以实现定位并向外界发布文字信息。
59.最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。