1.本实用新型实施例涉及机器人技术领域,特别是涉及一种水下机器人。
背景技术:
2.海洋占地球表面积的71%,拥有14亿立方公里的体积。在海底及海洋中,蕴藏着极其丰富的生物资源及矿产资源,其对人们具有极强的吸引力。人们对海洋进行探索时,需要一种伴游水下机器人,这种伴游水下机器人可以跟随人类,以及对海洋进行拍摄等操作。
3.本实用新型的发明人在实现本实用新型的过程中,发现:目前,市面上的水下机器人只能提供水平方向上的驱动力,不方便。
技术实现要素:
4.鉴于上述问题,本实用新型实施例提供了一种水下机器人,克服了上述问题或者至少部分地解决了上述问题。
5.根据本实用新型实施例的一个方面,提供了一种水下机器人,包括:壳体;拍摄装置,设置于所述壳体;驱动装置,包括第一推进器、第二推进器和第三推进器,所述第一推进器和第二推进器相对设置于所述壳体的两侧面,所述第一推进器和第二推进器均用于向所述水下机器人提供水平方向的驱动力,所述第三推进器设置于所述壳体的后端,所述第三推进器用于向所述水下机器人提供垂直方向的驱动力;控制器,分别与所述拍摄装置和驱动装置连接;供电装置,设置于所述壳体内,分别与所述拍摄装置、驱动装置和控制器连接。
6.在一种可选的方式中,所述壳体的一侧面延伸有第一安装件,所述第一安装件设置第一收容槽,所述第一推进器设置于所述第一收容槽的槽底,所述第一收容槽的槽底设置第一过流孔;所述壳体的另一侧面延伸有第二安装件,所述第二安装件设置第二收容槽,所述第二推进器设置于所述第二收容槽的槽底,所述第二收容槽的槽底设置第二过流孔。
7.在一种可选的方式中,所述第一安装件与所述壳体的连接处凹陷形成第一过流槽,所述第一安装件、第一过流槽和壳体的纵截面为流线型;所述第二安装件与所述壳体的连接处凹陷形成第二过流槽,所述第二安装件、第二过流槽和壳体的纵截面为流线型。
8.在一种可选的方式中,所述壳体的后端延伸有第三安装件,所述第三安装件在垂直方向的高度小于所述壳体在垂直方向的高度;所述第三安装件设置第三收容槽,所述第三推进器设置于所述第三收容槽的槽底,所述第三收容槽的槽底设置第三过流孔。
9.在一种可选的方式中,所述供电装置设置于所述壳体内,所述驱动装置设置于所述壳体外,所述壳体设置过线槽和过线孔;所述过线槽的一端位于所述驱动装置,所述过线槽的另一端位于所述过线孔;所述过线孔处设置水密接头,与所述驱动装置连接的线材经所述过线槽和水密接头与所述供电装置连接。
10.在一种可选的方式中,所述拍摄装置包括透光件和摄像机;所述透光件设置于所述壳体的前端,所述摄像机设置于所述壳体内,所述摄像机的取景范围覆盖所述透光件。
11.在一种可选的方式中,所述壳体包括外壳和腔体;所述腔体收容于所述外壳内;所
述驱动装置设置于所述外壳;所述控制器和供电装置均设置于所述腔体内;所述腔体设置前端开口,所述透光件盖设于所述前端开口,所述透光件与所述腔体可拆卸连接,所述透光件盖设于所述前端开口时,所述透光件与所述腔体密封;所述摄像机设置于所述腔体内。
12.在一种可选的方式中,所述腔体包括收容仓和盖板;所述前端开口位于所述收容仓,所述收容仓设置有与所述前端开口相对的后端开口;所述盖板盖设于所述后端开口,所述盖板与所述收容仓可拆卸连接,所述盖板盖设于所述后端开口时,所述盖板与所述收容仓密封。
13.在一种可选的方式中,所述盖板外环设第一安装部,所述盖板朝向所述收容仓延伸第一密封部,所述第一密封部设置第一密封槽,所述第一密封槽环设所述第一密封部,所述第一密封槽设置第一弹性件,所述第一密封部通过所述第一弹性件与所述收容仓的内壁抵接,所述第一安装部与所述收容仓的后端抵接。
14.在一种可选的方式中,所述透光件外环设第二安装部,所述透光件朝向所述收容仓延伸第二密封部,所述第二密封部设置第二密封槽,所述第二密封槽环设所述第二密封部,所述第二密封槽设置第二弹性件,所述第二密封部通过所述第二弹性件与所述收容仓的内壁抵接,所述第二安装部与所述收容仓的前端抵接。
15.本实用新型实施例的有益效果是:提供了一种水下机器人,水下机器人包括壳体、拍摄装置、驱动装置、控制器和供电装置。所述拍摄装置设置于所述壳体;驱动装置包括第一推进器、第二推进器和第三推进器,所述第一推进器和第二推进器相对设置于所述壳体的两侧面,所述第一推进器和第二推进器均用于向所述水下机器人提供水平方向的驱动力,所述第三推进器设置于所述壳体的后端,所述第三推进器用于向所述水下机器人提供垂直方向的驱动力。控制器,分别与所述拍摄装置和驱动装置连接。供电装置设置于所述壳体内,分别与所述拍摄装置、驱动装置和控制器连接,用于向所述拍摄装置、驱动装置和控制器供电。所述水下机器人可分别朝向水平方向和垂直方向运动,以及,朝向水平方向和垂直方向加成的方向运动,用户体验良好。
附图说明
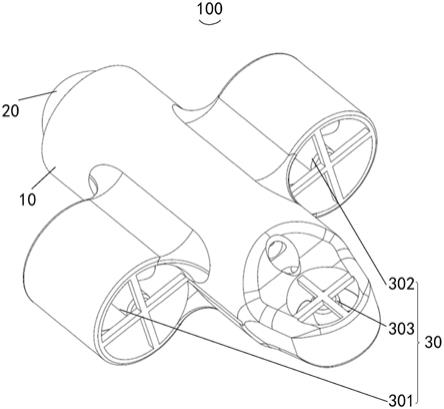
16.图1是本实用新型实施例提供的水下机器人的示意图;
17.图2是本实用新型实施例提供的水下机器人各部件的连接关系图;
18.图3是本实用新型实施例提供的水下机器人的爆炸示意图;
19.图4是本实用新型实施例提供的图3中a部的放大图。
具体实施方式
20.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
21.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了
描述具体实施例的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
22.请参阅图1和图2,水下机器人100包括:壳体10、拍摄装置20、驱动装置30、控制器40和供电装置50。所述拍摄装置20设置于所述壳体10;驱动装置30包括第一推进器301、第二推进器302和第三推进器303,所述第一推进器301和第二推进器302相对设置于所述壳体10的两侧面,所述第一推进器301和第二推进器302均用于向所述水下机器人100提供水平方向的驱动力,所述第三推进器303设置于所述壳体10的后端,所述第三推进器303用于向所述水下机器人100提供垂直方向的驱动力。控制器40,分别与所述拍摄装置20和驱动装置30连接。供电装置50设置于所述壳体10内,分别与所述拍摄装置20、驱动装置30和控制器40连接,用于向所述拍摄装置20、驱动装置30和控制器40供电。所述水下机器人100可分别朝向水平方向和垂直方向运动,以及,朝向水平方向和垂直方向加成的方向运动,用户体验良好。
23.对于上述壳体10,请参阅图3,壳体10的一侧面延伸有第一安装件60,所述第一安装件60设置第一收容槽(图未示),所述第一推进器301设置于所述第一收容槽的槽底,所述第一收容槽的槽底设置第一过流孔601。所述壳体10的另一侧面延伸有第二安装件70,所述第二安装件70设置第二收容槽(图未示),所述第二推进器302设置于所述第二收容槽的槽底,所述第二收容槽的槽底设置第二过流孔701。
24.可以理解的是,由于所述第一推进器301和第二推进器302均用于向所述水下机器人100提供水平方向的驱动力,则优选的,所述第一收容槽的槽口朝向所述壳体10的前端,所述第二收容槽的槽口朝向所述壳体10的前端。
25.需要说明的是,本技术中的前端是指所述水下机器人100前进的方向,本技术的后端是指与所述前端相对的方向。
26.在一些实施例中,所述第一安装件60与所述壳体10的连接处凹陷形成第一过流槽602,所述第一安装件60、第一过流槽602和壳体10的纵截面为流线型。所述第二安装件70与所述壳体10的连接处凹陷形成第二过流槽702,所述第二安装件70、第二过流槽702和壳体10的纵截面为流线型。通过设置所述第一过流槽602、第二过流槽702、将所述第一安装件60、第一过流槽602和壳体10的纵截面设置为流线型以及将所述第二安装件70、第二过流槽702和壳体10的纵截面设置为流线型,则所述水下机器人100在水下运动时的阻力小。
27.对于上述壳体10,壳体10的后端延伸有第三安装件80,所述第三安装件80在垂直方向的高度小于所述壳体10在垂直方向的高度。所述第三安装件80设置第三收容槽(图未示),所述第三推进器303设置于所述第三收容槽的槽底,所述第三收容槽的槽底设置第三过流孔801。通过将所述第三安装件80在垂直方向的高度设置的小于所述壳体10在垂直方向的高度,则一方面可减轻所述水下机器人100的自重,另一方面,可减少所述水下机器人100在水下运动的阻力。
28.在一些实施例中,可将所述壳体10与所述第三安装件80处设置为流线型,从而进一步的减少所述水下机器人100在水下运动的阻力。
29.对于上述壳体10,在一些实施例中,壳体10包括外壳101和腔体102,所述腔体102收容于所述外壳101内,所述驱动装置30设置于所述外壳101。所述控制器40和供电装置50均设置于所述腔体102内。所述腔体102设置前端开口,所述前端开口用于所述拍摄装置20
安装。
30.在一些实施例中,所述腔体102包括收容仓1021和盖板1022,所述前端开口位于所述收容仓1021,所述收容仓1021设置有与所述前端开口相对的后端开口。所述盖板1022盖设于所述后端开口,所述盖板1022与所述收容仓1021可拆卸连接,所述盖板1022盖设于所述后端开口时,所述盖板1022与所述收容仓1021密封。
31.在一些实施例中,所述盖板1022外环设第一安装部(未标示),所述盖板1022朝向所述收容仓1021延伸第一密封部(未标示),所述第一密封部设置第一密封槽(未标示),所述第一密封槽环设所述第一密封部,所述第一密封槽设置第一弹性件(图未示),所述第一密封部通过所述第一弹性件与所述收容仓1021的内壁抵接,所述第一安装部与所述收容仓1021的后端抵接,从而通过所述第一弹性件可实现所述盖板1022与所述收容仓1021的密封。
32.需要说明的是,在一些实施例中,所述第一弹性件为o型圈。
33.在一些实施例中,所述第一安装部与所述收容仓1021的后端抵接后通过螺钉连接,从而实现所述盖板1022与所述收容仓1021的可拆卸连接。
34.可以理解的是,所述壳体10包括外壳101时,所述第一推进器301和第二推进器302位于所述外壳101的两侧面,所述第三推进器303设置于所述外壳101的后端。
35.对于上述拍摄装置20,拍摄装置20包括透光件201和摄像机202。所述透光件201设置于所述壳体10的前端,所述摄像机202设置于所述壳体10内,所述摄像机202的取景范围覆盖所述透光件201。所述壳体10包括外壳101和腔体102时,所述透光件201盖设于所述腔体102的前端开口,所述透光件201与所述腔体102可拆卸连接,所述透光件201盖设于所述前端开口时,所述透光件201与所述腔体102密封。所述摄像机202设置于所述腔体102内。
36.所述透光件201与所述腔体102密封的方式与所述盖板1022与所述收容仓1021的密封方式相同。请参阅图4,所述透光件201外环设第二安装部2011,所述透光件201朝向所述收容仓1021延伸第二密封部2012,所述第二密封部2012设置第二密封槽2013,所述第二密封槽2013环设所述第二密封部2012,所述第二密封槽2013设置第二弹性件(图未示),所述第二密封部2012通过所述第二弹性件与所述收容仓1021的内壁抵接,所述第二安装部2011与所述收容仓1021的前端抵接,从而通过所述第二弹性件可实现所述透光件201与所述收容仓1021的密封。
37.需要说明的是,在一些实施例中,所述第二弹性件为o型圈。
38.在一些实施例中,所述第二安装部2011与所述收容仓1021的前端抵接后通过螺钉连接,从而实现所述透光件201与所述收容仓1021的可拆卸连接。
39.对于上述控制器40,控制器40分别与所述拍摄装置20和驱动装置30连接。
40.在一些实施例中,控制器40用于控制所述拍摄装置20拍摄目标的图像,以及控制所述驱动装置30驱动所述水下机器人100跟随所述目标。
41.在一些实施例中,请参阅图2,所述水下机器人100还包括通信接口90,所述通信接口90与所述控制器40连接。预先对需要跟随的目标进行拍摄,然后通过通信接口90将目标的拍摄数据传入所述控制器40,则控制器40可根据预先拍摄的拍摄数据控制拍摄装置20对目标进行拍摄,以及在拍摄装置20拍摄目标的拍摄数据后,控制所述驱动装置30驱动所述水下机器人100跟随所述目标。所述控制器40所涉及的程序步骤是采用现有程序步骤,控制
器40也是采用现有的处理器,例如:英特尔的i3处理器、amd锐龙处理器等等。上述控制器40所涉及的程序步骤可参考专利cn111798496a、cn103149939a和cn110414375b。
42.在一些实施例中,目标为人类时,可预先拍摄不同手势的图像,以及对不同的手势配置不同的命令,例如贴近或者远离目标,改变拍摄角度等。当拍摄装置20拍摄人类图像后,控制器40可对图像进行解析,当解析出预设的手势时,可控制水下机器人100执行相应的命令。所述控制器40所涉及的程序步骤是采用现有程序步骤,控制器40也是采用现有的处理器。上述控制器40所涉及的程序步骤可参考专利cn111401318a、cn106648063b和us10824240b2。
43.对于上述供电装置50,供电装置50设置于所述壳体10内,所述驱动装置30设置于所述壳体10外,所述壳体10设置过线槽103和过线孔104。所述过线槽103的一端位于所述驱动装置30,所述过线槽103的另一端位于所述过线孔104。所述过线孔104处设置水密接头,与所述驱动装置30连接的线材经所述过线槽103和水密接头与所述供电装置50连接。
44.需要说明的是,所述驱动装置30连接的线材经所述过线槽103和水密接头与所述供电装置50连接后,使用密封胶对所述过线槽103进行密封。
45.在一些实施例中,所述供电装置50包括蓄电池501和充电接口,所述蓄电池501设置于所述壳体10,所述充电接口的一端与所述控制器40连接,所述充电接口的另一端用于连接外部电源。
46.在一些实施例中,所述供电装置50还包括间隔板502,所述间隔板502的数量为多个,多个所述间隔板502间隔设置于所述壳体10,所述蓄电池501的数量为多个,多个蓄电池501分布于多个所述间隔板502。通过设置所述间隔板502,则可对多个所述蓄电池501提供支撑。
47.值得说明的是,在一些实施例中,所述过线孔104的数量为多个,所述水密接头的数量为多个,每一过线孔104处设置一水密接头。所述水密接头可用于所述驱动装置30与所述供电装置50连接时过线。所述水密接头可用于设置所述充电接口。所述水密接头还可用于设置所述通信接口90。
48.在本实用新型实施例中,水下机器人100包括壳体10、拍摄装置20、驱动装置30、控制器40和供电装置50。所述拍摄装置20设置于所述壳体10;驱动装置30包括第一推进器301、第二推进器302和第三推进器303,所述第一推进器301和第二推进器302相对设置于所述壳体10的两侧面,所述第一推进器301和第二推进器302均用于向所述水下机器人100提供水平方向的驱动力,所述第三推进器303设置于所述壳体10的后端,所述第三推进器303用于向所述水下机器人100提供垂直方向的驱动力。控制器40,分别与所述拍摄装置20和驱动装置30连接。供电装置50设置于所述壳体10内,分别与所述拍摄装置20、驱动装置30和控制器40连接,用于向所述拍摄装置20、驱动装置30和控制器40供电。所述水下机器人100可分别朝向水平方向和垂直方向运动,以及,朝向水平方向和垂直方向加成的方向运动,用户体验良好。
49.需要说明的是,本实用新型的说明书及其附图中给出了本实用新型的较佳的实施例,但是,本实用新型可以通过许多不同的形式来实现,并不限于本说明书所描述的实施例,这些实施例不作为对本实用新型内容的额外限制,提供这些实施例的目的是使对本实用新型的公开内容的理解更加透彻全面。并且,上述各技术特征继续相互组合,形成未在上
面列举的各种实施例,均视为本实用新型说明书记载的范围;进一步地,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。