1.本实用新型涉及模拟花开技术领域,尤其涉及动态模拟仿真系统。
背景技术:
2.目前,市场上的装饰品、玩具日新月异,款式多样,不但在外形上制作精美,为了吸引使用者的兴趣,更在动态上不断改进,以力图能吸引更多消费者的注意。现在的玩具或者展示机构中,有许多能模拟人类或动物、植物动作的电动玩具由于具有“动”的效果,比静态的玩具更能引起消费者的关注,更受欢迎。
3.例如自然界的花开过程是一种动态过程,而科技馆行业同类产品在对生长开花的花进行模拟演示时,主要是以平面静态展示为主,展示方式单调枯燥,缺少科学性和趣味性。
技术实现要素:
4.基于背景技术存在的技术问题,本实用新型提出了动态模拟仿真系统,动态展示花开过程,具有科学性和趣味性。
5.本实用新型提出的动态模拟仿真系统,包括固定支架、压圈机构、花翼机构和用于驱动压圈机构运动的伺服驱动机构;压圈机构套设在固定支架上、并与固定支架滑动连接,花翼机构的一端与压圈机构铰接、另一端自由伸长,伺服驱动机构固定于固定支架上。
6.进一步地,所述固定支架包括架体和固定于架体上的主轴,所述压圈机构包括外环压圈单元、中环压圈单元和内环压圈单元;在沿靠近主轴的方向上,外环压圈单元、中环压圈单元和内环压圈单元依次套设在主轴外侧,并均沿主轴轴线运动。
7.进一步地,所述花翼机构包括外环花翼单元、中环花翼单元和内环花翼单元,外环花翼单元、中环花翼单元和内环花翼单元均与架体铰接。
8.进一步地,,外环花翼单元的一端铰接有第一连接杆,第一连接杆与外环压圈单元铰接连接,中环花翼单元的一端铰接有第二连接杆,第二连接杆与中环压圈单元铰接连接,内环花翼单元的一端铰接有第三连接杆,第三连接杆与内环压圈单元铰接连接。
9.进一步地,所述伺服驱动机构包括第一电缸、第二电缸和第三电缸,第一电缸的固定端固定于架体上、伸缩端与外环压圈单元固定连接,第二电缸的固定端固定于架体上、伸缩端与中环压圈单元固定连接,第三电缸的固定端固定于架体上、伸缩端与内环压圈单元固定连接。
10.本实用新型提供的动态模拟仿真系统的优点在于:本实用新型结构中提供的动态模拟仿真系统,压圈机构通过伺服驱动机构驱动以沿主轴上下运动,因而使得花翼机构做花开的展开运动,以动态方式模拟美丽的花开过程,展示花儿智慧,增加了科学性和趣味性,三个花翼单元以同一轴线向外展开,更好的模拟花开的实际过程;三个压圈单元通过三个电缸分别独立驱动,便于控制三个花翼单元的张开幅度,以更形象的呈现仿真模拟过程。
附图说明
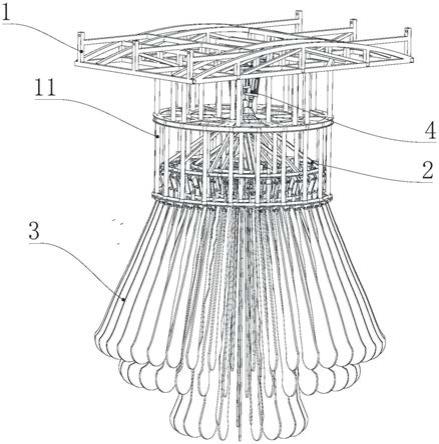
11.图1为本实用新型的结构示意图;
12.图2为图1中去掉固定支架的结构示意图;
13.图3为图2中a的局部示意图;
14.其中,1-固定支架,2-压圈机构,3-花翼机构,4-伺服驱动机构,11-架体,12-主轴,21-外环压圈单元,22-中环压圈单元,23-内环压圈单元,31-外环花翼单元,32-中环花翼单元,33-内环花翼单元,34-第一连接杆,35-第二连接杆,36-第三连接杆,41-第一电缸,42-第二电缸,43-第三电缸。
具体实施方式
15.下面,通过具体实施例对本实用新型的技术方案进行详细说明,在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施的限制。
16.如图1至3所示,本实用新型提出的动态模拟仿真系统,包括固定支架1、压圈机构2、花翼机构3和用于驱动压圈机构2运动的伺服驱动机构4;压圈机构2套设在固定支架1上、并与固定支架1滑动连接,花翼机构3的一端与压圈机构2铰接、另一端自由伸长,伺服驱动机构4固定于固定支架1上。
17.整个仿真装置可以通过固定支架1固定于某一位置,用于模拟花开的过程,压圈机构2可以设置为圆形,其圆心穿过固定支架1的主轴12,并通过伺服驱动机构4驱动以沿主轴12上下运动,因而使得花翼机构3做花开的展开运动,以动态方式模拟美丽的花开过程,展示花儿智慧。
18.同样,在仿真装置工作的过程中,可以通过plc控制伺服驱动机构4,使得压圈机构2以设定的速度进行展开,且展开大小也可以通过plc控制伺服驱动机构4来设置;同时可以配备灯光效果和背景音乐,使得仿真装置在花开的过程中,增加了趣味性和仿真效果性。
19.在本实施例中,所述固定支架1包括架体11和固定于架体11上的主轴12,所述压圈机构2包括外环压圈单元21、中环压圈单元22和内环压圈单元23;在沿靠近主轴12的方向上,外环压圈单元21、中环压圈单元22和内环压圈单元23依次套设在主轴12外侧,并均沿主轴12轴线运动。
20.外环压圈单元21、中环压圈单元22和内环压圈单元23(以下用三个压圈单元表示21、22、23)的同轴设置,使得三个压圈单元可以同轴上下运动,进而使得对应连接的花翼机构3能以同一轴线向外展开,更好的模拟花开的实际过程。
21.具体地,所述花翼机构3包括外环花翼单元31、中环花翼单元32和内环花翼单元33(以下以三个花翼单元表示31、32、33),外环花翼单元31、中环花翼单元32和内环花翼单元33均与架体11铰接。外环花翼单元31的一端铰接有第一连接杆34,第一连接杆34与外环压圈单元21铰接连接,中环花翼单元32的一端铰接有第二连接杆35,第二连接杆35与中环压圈单元22铰接连接,内环花翼单元33的一端铰接有第三连接杆36,第三连接杆36与内环压圈单元23铰接连接。
22.由于三个花翼单元的一端均与架体铰接,因而三个压圈单元向下运动的过程中,
使得与之连接的第一连接杆34、第二连接杆35和第三连接杆36(以下可以以三个连接杆表示34、35、36)向下运动,由于三个连接杆分别与对应的三个花翼单元铰接,而三个花翼单元与架体11铰接,使得三个花翼单元不会上下运动,根据铰接转动关系,三个花翼单元在三个连接杆的铰接转动下受到向外张开的力,从而使得三个花翼单元分别向外张开运动,以实现模拟花开的效果。
23.需要说明的是,三个连接杆的结构和运动方式类似,如图3所示的第一连接杆34的具体连接方式,另两个连接杆的连接方式与第一连接杆34类似,在此不赘述。
24.需要说明的是,三个花翼单元的运动是独立的,因而所述伺服驱动机构4包括第一电缸41、第二电缸42和第三电缸43(以下以三个电缸表示41、42、43),第一电缸41的固定端固定于架体11上、伸缩端与外环压圈单元21固定连接,第二电缸42的固定端固定于架体11上、伸缩端与中环压圈单元22固定连接,第三电缸43的固定端固定于架体11上、伸缩端与内环压圈单元23固定连接。
25.三个压圈单元通过对应的三个电缸进行独立驱动运动,可以通过plc分别控制三个电缸的伸缩运动里程,来控制三个压圈单元沿主轴12的运动距离,进而控制三个花翼单元的张开幅度。
26.工作过程:将架体11固定于需要演示的位置,可以在仿真装置前方设置一个控制台,控制台上设置开始按钮、速度按钮等,按下开始按钮,可以观察到三个花翼单元张开,同时伴随着灯光和背景音乐,呈现了花开的仿真模拟过程,然后可以按下速度按钮,以通过plc分别控制三个电缸的伸长里程变化,可以观察到三个花翼单元张开幅度变化,以更形象的呈现仿真模拟过程。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。