1.本发明涉及一种记录装置。
背景技术:
2.专利文献1中所记载的印刷装置具有:输送带;标尺部,其沿着输送方向进行设置;检测部,其对移动量进行检测;把持部,其能够相对于输送带而变更为把持状态和非把持状态;以及切换部,其对把持部的把持状态和非把持状态进行切换。把持部被构成为,能够在把持基板的端部与弹性部件的端部之间通过弹性部件的弹力来夹持输送带。
3.在专利文献1的结构中,虽然作为把持部的非把持状态,在使把持部向与输送方向相反的方向进行移动时,弹性部件的端部从输送带分离,但是把持基板的端部仍保持与输送带抵接。因此,在每次使把持部向与输送方向相反的方向进行移动时,把持基板的端部会与输送带的接触而产生摩擦,从而导致输送带的耐久性有可能降低。
4.专利文献1:日本特开2018-193199号公报
技术实现要素:
5.为了解决上述课题,本发明所涉及的记录装置的特征在于,具备:记录部,其能够在介质上进行记录;输送带,其具有对所述介质进行支承的第一面和在厚度方向上与该第一面相反的第二面,且在输送方向上对所述介质进行输送;刻度部,其具有刻度,且沿着所述输送方向进行设置;读取部,其能够读取所述刻度;把持部,其能够与所述刻度部或所述读取部一体地移动,且能够变更为把持状态和解除状态,所述把持状态为在对所述输送带于所述厚度方向上进行把持的同时与所述输送带一起移动的状态,所述解除状态为从所述输送带离开的状态;回位部,其使所述解除状态的所述把持部向与所述输送方向相反的方向进行移动,所述把持部具有第一抵接部和第二抵接部,所述第一抵接部在所述把持状态下与所述第一面接触,所述第二抵接部在所述把持状态下与所述第二面接触,在所述把持部成为所述解除状态的情况下,所述第一抵接部从所述第一面分离,与此连动,所述第二抵接部从所述第二面分离。
附图说明
6.图1为表示实施方式1的打印机的内部结构的整体图。
7.图2为表示实施方式1的通过输送单元来输送介质的状态的立体图。
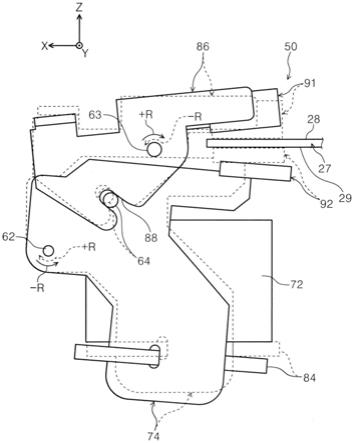
8.图3为实施方式1的胶带、把持单元以及回位单元的立体图。
9.图4为实施方式1的把持单元以及回位单元的立体图。
10.图5为表示实施方式1的把持单元的非把持状态的立体图。
11.图6为实施方式1的把持单元的侧视图。
12.图7为表示实施方式1的把持单元的内部结构的立体图。
13.图8为表示实施方式1的把持单元的去除了搭载框架的状态的立体图。
14.图9为表示实施方式1的减震器的立体图。
15.图10的(a)为表示利用实施方式1的把持单元来检测胶带的移动距离的第一工序的示意图,图10的(b)为表示该移动距离的检测的第二工序的示意图,图10的(c)为表示该移动距离的检测的第三工序的示意图,图10的(d)为表示该移动距离的检测的第四工序的示意图,图10的(e)为表示该移动距离的检测的第五工序的示意图。
16.图11为表示实施方式1的把持单元的把持状态以及解除状态的示意图。
17.图12为表示实施方式2的打印机的把持单元的示意图。
18.图13为表示实施方式3的打印机的把持单元的示意图。
19.图14为表示实施方式4的打印机的把持单元的示意图。
20.图15为表示实施方式5的打印机的把持单元的示意图。
21.图16为表示实施方式6的打印机的把持单元的示意图。
22.图17为表示实施方式7的打印机的把持单元的示意图。
23.图18为表示实施方式8的打印机的把持单元的示意图。
24.图19为表示实施方式9的打印机的把持单元的示意图。
25.图20为表示实施方式2的打印机中的变形例的把持单元的示意图。
具体实施方式
26.以下,概要性地对本发明进行说明。
27.用于解决上述课题的本发明的第一方式所涉及的记录装置的特征在于,具备:记录部,其能够在介质上进行记录;输送带,其具有对所述介质进行支承的第一面和在厚度方向上与该第一面相反的第二面,且在输送方向上对所述介质进行输送;刻度部,其具有刻度,且沿着所述输送方向进行设置;读取部,其能够读取所述刻度;把持部,其能够与所述刻度部或所述读取部一体地移动,且能够变更为把持状态和解除状态,所述把持状态为在对所述输送带于所述厚度方向上进行把持的同时与所述输送带一起移动的状态,所述解除状态为从所述输送带离开的状态;回位部,其使所述解除状态的所述把持部向与所述输送方向相反的方向进行移动,所述把持部具有第一抵接部和第二抵接部,所述第一抵接部在所述把持状态下与所述第一面接触,所述第二抵接部在所述把持状态下与所述第二面接触,在所述把持部成为所述解除状态的情况下,所述第一抵接部从所述第一面分离,与此连动,所述第二抵接部从所述第二面分离。
28.根据本方式,在解除状态下所述第一抵接部以及所述第二抵接部从所述输送带分离。由此,在解除状态的所述把持部通过所述回位部而向所述相反的方向进行移动时,不会存在所述第一抵接部以及所述第二抵接部中的一方保持与所述输送带接触的状态而向所述相反的方向移动的情况,即,抑制了在所述输送带上产生摩擦的情况,因此能够抑制所述输送带的耐久性降低的情况。
29.第二方式所涉及的记录装置的特征在于,在第一方式中,具有:切换部,其对所述把持部在所述把持状态和所述解除状态之间进行切换;第一支承部,其对所述第一抵接部进行支承;第二支承部,其对所述第二抵接部进行支承,所述第一支承部以及所述第二支承部中的至少一方由铁磁体构成,所述切换部具有在电流流通的情况下产生电磁力的电磁体,且通过使所述电磁体吸引所述第一支承部以及所述第二支承部中的至少一方,而将所
述把持部从所述解除状态切换为所述把持状态。
30.根据本方式,与经由电机以及连杆机构而牵拉所述第一支承部以及所述第二支承部中的至少一方的结构相比,由于无需连杆机构的移动所需的空间部,因此能够使所述切换部以及所述把持部小型化。
31.第三方式所涉及的记录装置的特征在于,在第二方式中,具有主体部件,在该主体部件上分别以能够转动的方式连结有所述第一支承部以及所述第二支承部,并且,设置有连结部,所述连结部将所述第一支承部和所述第二支承部连结,在所述主体部件上设置有容许部,所述容许部容许所述连结部相对于所述主体部件的位移。
32.根据本方式,与所述第一支承部和所述第二支承部被连结于不同的部件上的结构相比,由于所述第一支承部和所述第二支承部连结于同一个所述主体部件上,从而减少了所述第一支承部和所述第二支承部的相对的组装误差,因此能够抑制在所述连结部中所述第一支承部和所述第二支承部的相对的位置偏移。
33.第四方式所涉及的记录装置的特征在于,在第二方式或者第三方式中,所述第一支承部以及所述第二支承部中的至少一方具有被所述电磁体吸引的被吸引部,所述被吸引部被配置于在所述被吸引部上重力发挥作用的方向即重力方向上与所述电磁体相比靠下方处,并且在所述把持状态下从所述电磁体离开。
34.根据本方式,由于被所述电磁体吸引的部分即所述被吸引部在所述把持状态下从所述电磁体离开,因此与不离开的情况相比,能够减小所述第二支承部的磁化。由此,在所述电磁体中流通的电流被切断后的所述第二支承部的残留磁化变小,且所述第二支承部因重力的作用而从所述电磁体离开,因此能够通过简易的结构来向所述解除状态进行切换。
35.第五方式所涉及的记录装置的特征在于,在第一方式至第四方式中的任意一个方式中,所述刻度部为,作为所述刻度而记录了磁性图案的磁性标尺。
36.根据本方式,由于在所述磁性标尺中所使用的磁力线的强度与光线的强度相比不容易因灰尘等异物而降低,因此在所述刻度部上附着了异物的情况下,能够抑制在所述读取部中所述刻度的读取精度降低的情况。
37.第六方式所涉及的记录装置的特征在于,在第一方式至第五方式中的任意一个方式中,所述把持部由调节部支承,所述调节部能够对所述把持部的与所述输送方向交叉的装置高度方向上的位置进行调节。
38.根据本方式,通过利用所述调节部,而能够对所述把持状态下的所述把持部的所述厚度方向上的位置进行调节。即使存在所述输送带挠曲而所述输送带的位置在所述厚度方向上发生偏移的情况,也能够通过该作用而使所述把持部对所述输送带进行把持。
39.第七方式所涉及的记录装置的特征在于,在第一方式至第六方式中的任意一个方式中,具备:引导部件,其在所述输送方向上对所述把持部进行引导;驱动部,其对所述回位部进行驱动,所述把持部在所述输送方向的第一位置处成为所述把持状态,在与所述第一位置相比靠下游的第二位置处成为所述解除状态,所述回位部被所述引导部件支承,且通过在所述第二位置处被所述驱动部驱动从而使所述把持部向所述相反的方向进行移动。
40.根据本方式,与所述把持部具备所述驱动部的情况相比,能够抑制机械负载作用于所述把持部的情况。由此,在所述把持部上不会作用除了所述引导部件其本身所具有的向所述把持部的机械负载以外的机械负载,因此所述把持状态的所述把持部沿着所述相反
的方向而从所述第二位置向所述第一位置进行移动时,不会存在所述把持部的移动由于所述机械负载而被阻碍的情况。
41.因此,抑制了所述把持部对所述输送带进行把持的位置向所述输送方向发生偏移的情况,从而能够抑制由所述把持部实施的所述输送带的移动量的检测精度降低的情况。
42.第八方式所涉及的记录装置的特征在于,在第七方式中,所述回位部在所述把持部位于所述第二位置的情况下,以离开所述把持部的方式位于与所述把持部相比靠所述输送方向的下游处,在所述回位部以及所述把持部中的至少一方上设置有缓和部件,所述缓和部件缓和由于所述回位部与所述把持部的接触而产生的冲击力。
43.根据本方式,在所述回位部使所述把持部向所述相反的方向进行移动的情况下,相比于所述回位部与所述把持部直接接触的情况,能够通过所述缓和部件来缓和作用于所述把持部的冲击力。由此,能够抑制在所述把持部的动作中发生故障的情况。
44.第九方式所涉及的记录装置的特征在于,在第一方式至第八方式中的任意一个方式中,设置有限制部,所述限制部通过与所述把持部接触来限制所述输送方向上的所述把持部的移动范围,在所述把持部以及所述限制部中的至少一方上设置有其他的缓和部件,所述其他的缓和部件缓和由于所述把持部与所述限制部的接触而产生的冲击力。
45.根据本方式,相比于所述把持部与所述限制部直接接触的情况,能够通过其他的缓和部件来缓和施加于所述把持部的冲击力。由此,能够抑制在所述把持部的动作中发生故障的情况。
46.以下,具体地对作为本发明所涉及的记录装置的一个示例的实施方式1的打印机10进行说明。
47.在图1中示出了打印机10的整体结构。打印机10作为如下喷墨式的装置而被构成,所述喷墨式的装置通过对作为介质的一个示例的布帛m喷出作为液体的一个示例的油墨从而进行记录。另外,在各图中所示的x-y-z坐标系为正交坐标系。另外,将布帛m中的、通过记录单元20来实施记录的面称为被记录面ma,并将与被记录面ma相反的面称为背面mb。
48.x方向为,布帛m的宽度方向且打印机10的宽度方向,作为一个示例,成为水平方向。将从打印机10的操作者进行观察时x方向的朝向左方的方向称为+x方向,并将朝向右方的方向称为-x方向。此外,x方向为布帛m的宽度方向。
49.y方向为,被后述的平面28a支承的布帛m的输送方向且为打印机10的纵深方向,作为一个示例,成为水平方向。将输送布帛m的输送方向称为+y方向,将与+y方向相反的方向称为-y方向。
50.z方向为,打印机10的装置高度方向的一个示例,且成为铅直方向。将z方向的朝向上方的方向称为+z方向,将朝向下方的方向称为-z方向。-z方向为,重力发挥作用的方向即重力方向的一个示例。
51.实施方式1
52.作为主要部分,打印机10具备记录单元20、输送单元26、标尺部34、读取头36、导向单元40(图3)、把持单元50、回位滑架100和电机108(图4)。而且,打印机10具备主体框架12、未图示的拉出单元和控制单元18。
53.主体框架12作为设置打印机10的各部的基座而被构成。在主体框架12上以相对于x方向的中央而在+x方向和-x方向上对称的方式安装有支承框架14。支承框架14相对于后
述的胶带27而被配置在+x方向和-x方向处。
54.如图4所示,作为一个示例,支承框架14具备底板部15、侧板部16和支承板17。此外,在支承框架14上设置有阻挡件19。支承框架14的y方向的长度短于从后述的从动辊32起至记录单元20(图1)为止的y方向的长度。另外,对+x方向侧的支承框架14进行说明,并省略-x方向侧的支承框架14的说明。
55.底板部15在z方向上具有预定的厚度,且在y方向上延伸。
56.侧板部16从底板部15的+x方向侧的端部起向+z方向竖立。此外,侧板部16在x方向上具有预定的厚度,且沿着y-z面而进行配置。
57.在本实施方式中,设置有两个支承板17。作为一个示例,支承板17在x方向上具有预定的厚度,且在z方向上延伸。此外,两个支承板17以在y方向上隔开间隔的方式被安装在侧板部16的+x方向侧的侧面上。在支承板17上形成有在x方向上贯穿支承板17并且在z方向上隔开间隔地配置的未图示的多个贯穿孔。通过使插穿至该多个贯穿孔中的某一个中的螺栓固紧在主体框架12(图1)上,从而能够对支承板17的+z方向的高度进行调节。
58.换言之,支承框架14为调节部的一个示例,能够对z方向上的把持单元50的位置进行调节。此外,支承框架14对把持单元50进行支承。
59.阻挡件19为在从x方向进行观察时形成为l字状的部件,具有横部19a和纵部19b。
60.横部19a在y方向上延伸,且通过利用未图示的螺钉等而被固紧在底板部15中的-y方向侧的端部上从而被固定。
61.纵部19b从横部19a的-y方向侧的端部起向+z方向竖立。此外,纵部19b被配置为,在y方向上能够与后述的把持单元50接触。
62.阻挡件19为限制部的一个示例,并通过与把持单元50接触,从而对y方向上的把持单元50的移动范围进行限制。
63.在图1所示的打印机10中,在相对于输送单元26的-y方向处,设置有对被卷绕成卷筒状的布帛m进行支承的未图示的拉出单元。布帛m从该拉出单元被拉出。
64.控制单元18包括未图示的cpu(central processing unit,中央处理单元)、rom(read only memory,只读存储器)、ram(random access memory,随机存取存储器)以及储存器。此外,控制单元18对打印机10中的布帛m的输送、由记录单元20实施的向布帛m的记录动作等进行控制。
65.记录单元20包括记录头22以及滑架24。记录头22为记录部的一个示例,且通过向被记录面ma喷出油墨,从而能够进行向被记录面ma的记录。滑架24以能够沿着x方向而移动的方式被设置,且对记录头22以能够在x方向上移动的方式进行支承。
66.如图2所示,输送单元26包括:作为输送带的一个示例的胶带27;驱动辊31,其旋转通过控制单元18(图1)进行控制;从动辊32,其随着胶带27的移动而旋转。驱动辊31通过未图示的电机而旋转。
67.胶带27作为无接头带而被构成。将胶带27的厚度方向称为d方向。此外,胶带27具有对布帛m进行支承的第一面28、和在d方向上与第一面28相反的第二面29。
68.第一面28为外周面,且具有粘着性,而能够吸附布帛m。粘着性的含义是指,能够与其他的部件暂时性地粘合并且能够从粘合状态剥离的特性的意思。将第一面28中的、位于+z方向处并且沿着x-y面的部位称为平面28a。平面28a朝向+z方向而被配置并对布帛m进行
支承。另外,在通过在第一面28上涂敷粘合剂从而构成胶带27的情况下,粘合剂的最表层作为对布帛m进行支承的平面28a而发挥功能。
69.驱动辊31以及从动辊32分离地被配置于+y方向的上游和下游处。在驱动辊31以及从动辊32上卷挂有胶带27。通过利用驱动辊31的旋转而使胶带27的一部分向+y方向进行移动,从而布帛m向+y方向被输送。另外,在输送单元26中,通过调节驱动辊31的每单位时间的旋转数,从而使布帛m的输送速度成为可变。
70.如此,胶带27能够对布帛m朝向记录单元20(图1)在+y方向上进行输送。
71.如图3所示,标尺部34为刻度部的一个示例,且具有作为刻度的一个示例的多个磁铁35。也就是说,标尺部34作为磁性标尺而被形成,该磁性标尺将作为刻度的n极、s极的磁性图案以在y方向上交替地排列的方式记录而成。标尺部34的整体被形成为在x方向上具有预定的厚度的板状。
72.此外,标尺部34在+x方向侧的侧板部16上的-x方向侧的侧面、和-x方向侧的侧板部16上的+x方向侧的侧面上沿着+y方向而各设置有一个。标尺部34的y方向的长度成为后述的读取头36的+y方向的移动范围的长度以上。
73.另外,+x方向侧的标尺部34和-x方向侧的标尺部34同样地被构成,且相对于打印机10的x方向的中央而对称地被配置。因此,在之后的说明中,对+x方向侧的标尺部34进行说明,省略-x方向侧的标尺部34的说明。
74.读取头36为读取部的一个示例,且被安装在后述的把持单元50上。此外,读取头36包括未图示的两个检测头,且被形成为长方体状。两个检测头在y方向上排列,且与标尺部34在x方向上对置。具体而言,读取头36以其相位相对于被记录于标尺部34上的磁条纹图案的间距而偏移90度的方式被配置。通过读取头36而获得的电信号被送至未图示的信号处理电路,且被转换成读取头36的位置信息,并被发送至控制单元18(图1)。如此,读取头36被构成为能够对磁铁35进行读取。而且,读取头36在把持单元50向+y方向进行了移动的情况下,能够对把持单元50的+y方向上的距移动开始位置的移动距离和把持单元50的+y方向上的停止位置进行检测。另外,把持单元50的移动开始位置为后述的第一位置。读取头36例如可以使用霍尔元件、tmr元件。
75.导向单元40在y方向上独立地对把持单元50以及回位滑架100进行引导。具体而言,导向单元40具备导轨42、滑块44和滑块46。
76.导轨42被安装在侧板部16的-x方向侧的侧面上。此外,导轨42在y方向上延伸。
77.滑块44被导轨42支承,且能够沿着导轨42进行y方向上的移动。此外,滑块44将导轨42的+y方向侧的端部的位置作为回位滑架100的原点位置来进行配置。
78.滑块46被导轨42支承,且能够沿着导轨42进行y方向上的移动。此外,滑块46将导轨42的-y方向侧的端部的位置作为把持单元50的原点位置来进行配置。
79.导轨42以及滑块46为引导部件的一个示例,并对把持单元50向+y方向进行引导。另外,滑块44也包含在引导部件的一个示例中。
80.把持单元50通过使滑块46沿着导轨42进行移动,从而能够与读取头36一体地在y方向上进行移动。此外,把持单元50被构成为能够变更为把持状态和解除状态,所述把持状态为在d方向上对胶带27进行把持的同时与胶带27一起进行移动的状态,所述解除状态为从胶带27离开的状态。另外,把持单元50不具有驱动源。因此,把持单元50除了在把持状态
下随着胶带27的移动而进行移动的情况、和随着回位滑架100的移动而进行移动的情况之外,成为静止。
81.如图5所示,把持单元50具有:支承托架52、搭载框架57、固定框架66、切换部71、下杆74、衔铁84、上杆86、第一抵接部91以及第二抵接部92。此外,在把持单元50上设置有减震器98(图9)。
82.支承托架52具有:底壁53,其沿着x-y面;纵壁54,其在底壁53的+x方向侧的端部处向+z方向竖立;纵壁55,其在底壁53的-x方向侧的端部处向+z方向竖立;凸缘56,其从纵壁55的+z方向侧的端部起向-x方向延伸。
83.纵壁54在+z方向侧的端部处具有与z方向的其他的部位相比在y方向上被加宽的加宽部54a。在纵壁54的+x方向侧的侧面上安装有滑块46。
84.纵壁55的+z方向的高度低于纵壁54的+z方向的高度。
85.搭载框架57为主体部件的一个示例,在所述主体部件上分别以能够转动的方式连结有后述的上杆86以及下杆74。此外,搭载框架57具有侧板部58、上板部59和被安装部61。
86.在本实施方式中,设置有两个侧板部58。两个侧板部58在y方向上具有预定的厚度,且在y方向上隔开间隔地被配置。侧板部58在从y方向进行观察时,具有z方向的尺寸与x方向的尺寸相比而较长的矩形形状的部位、和在-x方向上具有顶点的三角形状的部位成为了一体的外形。在侧板部58的-x方向侧的端部上形成有向+x方向被切口的切口部58a。
87.如图6所示,在侧板部58的z方向的中央部分且+x方向侧的端部上形成有圆形的贯穿孔58b,该贯穿孔58b在y方向上贯穿侧板部58。在侧板部58的+z方向侧的部位上且-x方向侧的端部上形成有圆形的贯穿孔58c,该贯穿孔58c在y方向上贯穿侧板部58。而且,在侧板部58中的贯穿孔58b与贯穿孔58c之间的部位上形成有长孔58d,该长孔58d在y方向上贯穿侧板部58。另外,在侧板部58上形成有长孔58d的情况为,在侧板部58上设置容许部的情况的一个示例。
88.在贯穿孔58b中插入有第一轴62。在贯穿孔58c中插入有第二轴63。
89.在长孔58d中插穿有连杆轴64。长孔58d为容许部的一个示例,容许连杆轴64相对于搭载框架57的位移。
90.第一轴62被形成为具有沿着y方向的中心轴的圆柱状,且将两个侧板部58在y方向上进行连接。此外,第一轴62成为后述的下杆74的转动支轴。
91.第二轴63被形成为具有沿着y方向的中心轴的圆柱状,且将两个侧板部58在y方向上进行连接。此外,第二轴63成为后述的上杆86的转动支轴。
92.连杆轴64被形成为具有沿着y方向的中心轴的圆柱状,且将两个上杆86在y方向上进行连接。此外,连杆轴64以能够在长孔58d内自由地变更x方向以及z方向的位置的方式被配置。换言之,连杆轴64能够在长孔58d的长边方向上进行移动。y方向上的连杆轴64的两端被固紧在上杆86上。而且,连杆轴64通过与后述的凹部88接触,从而能够使后述的上杆86和下杆74连动。换言之,连杆轴64为连结部的一个示例,并将上杆86和下杆74进行连结。
93.上板部59将两个侧板部58的+z方向侧的端部在y方向上进行连接。此外,上板部59在z方向上具有预定的厚度。在上板部59的+z方向侧的上表面59a上安装有读取头36。
94.如图5所示,被安装部61从各个侧板部58的+x方向侧的端部中的+z方向侧的端部起向+y方向或者-y方向突出。此外,被安装部61通过对螺栓65a进行紧固从而被固定在加宽
部54a上。
95.固定框架66具有板部67和突出部68,所述板部67在z方向上具有预定的厚度,所述突出部68通过使板部67的一部分进行弯曲而从板部67起向-z方向突出。板部67的y方向的两端部中的一部分被插入到切口部58a中。突出部68通过对螺栓65b进行紧固从而被固定在侧板部58上。如此,搭载框架57以及固定框架66与支承托架52成为一体。
96.如图7所示,切换部71具有作为电磁体的一个示例的电磁铁72。电磁铁72被配置在相对于板部67的-z方向处,且通过对螺栓65c进行紧固从而被固定在板部67上。此外,电磁铁72经由电缆而连接于未图示的电源。而且,电磁铁72通过使电流从电源流动从而产生电磁力。换言之,电磁铁72使磁场产生。
97.切换部71通过在电磁铁72中流通电流,且利用电磁力而将下杆74的衔铁84向+z方向吸引,从而将把持单元50设为把持状态。此外,切换部71通过使在电磁铁72中流通的电流断开,且衔铁84因自重而向-z方向下降,从而将把持单元50设为解除状态。如此,切换部71将把持单元50切换为把持状态和解除状态。
98.如图8所示,下杆74为,对第二抵接部92进行支承的第二支承部的一个示例。此外,下杆74由铁磁体构成,且被形成为在y方向上具有预定的厚度的板状。在本实施方式中,铁磁体的含义是指,包括铁、钴、镍中的至少一个的金属的意思。
99.下杆74被配置在相对于电磁铁72的-y方向和+y方向处。两个下杆74通过第一轴62、上部件76和衔铁84而连接。具体而言,下杆74由基部74a、倾斜部74b、下部74c和延伸部74d组成。
100.如图7所示,基部74a为,在y方向上被配置于两个侧板部58之间的部位。此外,在基部74a的+x方向侧的端部上且在成为-z方向侧的端部的部位上形成有贯穿孔75a,该贯穿孔75a将基部74a贯穿。
101.在贯穿孔75a中穿插有第一轴62。而且,在基部74a上,在位于相对于贯穿孔75a的-x方向侧处且+z方向侧的部位上形成有贯穿孔75b,该贯穿孔75b将基部74a贯穿。
102.在贯穿孔75b中插穿有连杆轴64。此外,作为一个示例,贯穿孔75b被形成为在从y方向进行观察时在与z方向交叉的倾斜方向上较长的长孔。
103.如图8所示,倾斜部74b从基部74a起向斜下方延伸。
104.下部74c从倾斜部74b的-z方向侧的端部起向-z方向延伸。在下部74c的+x方向侧的端部上形成有切口部74e,该切口部74e朝向-x方向侧被切口。
105.延伸部74d从基部74a的-x方向侧的端部中的+z方向侧的端部起向-x方向延伸。
106.如图7所示,上部件76具有板状的安装部77和第二抵接部92,所述安装部77在z方向上具有预定的厚度,所述第二抵接部92从安装部77的-x方向侧的端中的+z方向侧的上端部起向-x方向延伸。此外,上部件76通过螺钉79(图8)而被固紧在延伸部74d上。
107.第二抵接部92由金属材料构成,且被形成为在z方向上具有预定的厚度的板状。在从z方向进行观察时,第二抵接部92被形成为,y方向的尺寸与x方向的尺寸相比较长的矩形形状。此外,第二抵接部92在从y方向进行观察时被配置在相对于下杆74的-x方向处且+z方向的位置处。第二抵接部92在把持单元50的把持状态下,与第二面29(图2)接触。
108.衔铁84为被电磁铁72吸引的被吸引部的一个示例,且为由金属材料构成并具有磁性的部件。此外,作为一个示例,衔铁84具有板状的主体部84a和安装部84b,所述主体部84a
在z方向上具有预定的厚度,所述安装部84b从主体部84a的y方向的两端部起向-z方向弯曲。
109.衔铁84的y方向的两端部中的一部分被插入到切口部74e中。然后,衔铁84通过使螺栓81(图8)固紧在安装部84b以及下杆74上,从而被安装在下杆74上。
110.衔铁84与电磁铁72相比被配置在-z方向处。衔铁84的主体部84a与电磁铁72在z方向上对置。由此,在电磁铁72中产生了磁场的情况下,衔铁84通过被电磁铁72的磁场吸引,从而朝向电磁铁72进行移动。换言之,下杆74在电磁铁72中产生了磁场的情况下,以第二轴63为中心进行转动。
111.此外,衔铁84在把持单元50的把持状态下,从电磁铁72离开。当具体地进行说明时,衔铁84通过被电磁铁72的磁场吸引,从而朝向电磁铁72进行移动。在此,在第一抵接部91以及第二抵接部92对胶带27(图1)进行了把持的情况下,通过第二抵接部92从胶带27受到的反作用力,从而下杆74的转动停止。此时,衔铁84以在z方向上于主体部84a与电磁铁72之间形成间隙的方式进行配置。
112.在对下杆74沿-y方向进行观察时,将顺时针方向设为+r方向,将逆时针方向设为-r方向。下杆74在电磁铁72中产生了磁场的情况下向-r方向进行转动。在下杆74向-r方向进行了转动的情况下,通过贯穿孔75b的孔壁与连杆轴64的外周面接触,从而连杆轴64向+z方向进行移动。
113.如图6所示,上杆86为对后述的第一抵接部91进行支承的第一支承部的一个示例。此外,上杆86被形成为在y方向上具有预定的厚度的板状。具体而言,上杆86被配置在相对于+y方向侧的侧板部58的+y方向侧和相对于-y方向侧的侧板部58的-y方向侧。换言之,两个上杆86相对于搭载框架57而被配置在y方向的外侧。两个上杆86通过第二轴63和连接部件87而连接。
114.如图8所示,上杆86由基部86a、纵部86b、凸缘部86c和延伸部86d组成。
115.基部86a为,在向y方向投影了的情况下,在z方向的长度l的范围内与下杆74重叠的部位。基部86a中的与z方向的中央相比位于-z方向的下部被形成为倒三角形状。在基部86a的下部形成有凹部88。
116.此外,在基部86a中,在相对于凹部88的-x方向侧处且+z方向侧的位置处形成有贯穿孔89a(图6),该贯穿孔89a在y方向上贯穿基部86a。在贯穿孔89a中插入有第二轴63的y方向的端部。
117.而且,在基部86a中,在相对于凹部88的+x方向侧处且在+z方向侧的位置处形成有贯穿孔89b,该贯穿孔89b在y方向上贯穿基部86a。通过贯穿孔89b的孔壁与被固紧在侧板部58上的螺栓51(图5)接触,从而上杆86的转动范围被限制在预定的范围内。
118.纵部86b从基部86a的+z方向侧的端部中的+x方向侧的端部起向+z方向竖立。
119.凸缘部86c从纵部86b的+z方向侧的端部起向+y方向伸出。
120.延伸部86d从基部86a的+z方向侧的端部中的-x方向侧的端部起向-x方向延伸。
121.如图6所示,凹部88从基部86a的外缘部起向斜上方凹陷。具体而言,凹部88朝向+x方向侧且+z方向侧的位置凹陷。在凹部88的位于最深处的部位上形成有曲面88a。此外,在凹部88中插入有连杆轴64的y方向的一部分。另外,凹部88被配置为,即使下杆74向+r方向、-r方向中的任意一个方向被转动也与连杆轴64的外周面接触。换言之,上杆86能够与下
杆74连动。此外,通过当在第一抵接部91以及第二抵接部92对胶带27进行了把持的状态下使连杆轴64沿着凹部88进行移动之后,将y方向上的连杆轴64的两端固紧在上杆86上,从而能够对上杆86以及下杆74的转动角进行调节。由此,能够对第一抵接部91以及第二抵接部92把持胶带27时的把持力进行调节。
122.如图7所示,连接部件87具有第一抵接部91和安装部94,所述第一抵接部91在y方向上延伸,所述安装部94从第一抵接部91起向+x方向延伸。
123.第一抵接部91由金属材料构成,且具有板状的底壁95和两个纵壁96,所述底壁95在z方向上具有预定的厚度,所述纵壁96从底壁95的x方向的两端部起向+z方向竖立。底壁95被形成为y方向的尺寸与x方向的尺寸相比较长的矩形形状。此外,底壁95与延伸部86d相比向-z方向突出。
124.安装部94被形成为在y方向上具有预定的厚度的板状,且利用螺栓97(图5)而被固定在延伸部86d上。
125.第一抵接部91在把持单元50的把持状态下,与第一面28(图2)接触。
126.如上述所述,在把持单元50中,上杆86和下杆74能够连动。由此,在把持单元50中,在成为解除状态的情况下,与第一抵接部91从第一面28分离的动作连动,第二抵接部92从第二面29(图2)分离。
127.如图4所示,将在把持单元50与支承框架14的-y方向侧的端部对置的状态下+y方向上的把持单元50的位置设为第一位置。此外,将+y方向上的与第一位置相比靠下游的位置且把持单元50成为解除状态时的把持单元50的位置设为第二位置。也就是说,把持单元50在+y方向的第一位置处成为把持状态,在第二位置处成为解除状态。
128.如图9所示,减震器98为其他的缓和部件的一个示例,且经由未图示的托架而被安装在底壁53的-y方向侧的端部上。换言之,减震器98被间接地设置在把持单元50上。
129.减震器98具有主体部98a和可动部98b,该可动部98b从主体部98a起向-y方向突出。可动部98b与纵部19b(图4)在y方向上对置。在减震器98中,通过与纵部19b的接触而在可动部98b上作用的冲击力在主体部98a中衰减。如此,减震器98缓和因把持单元50与阻挡件19(图4)的接触而产生的冲击力。
130.如图4所示,回位滑架100为回位部的一个示例,并且具有使解除状态的把持单元50向-y方向移动的功能。此外,回位滑架100通过驱动单元105而能够向+y方向以及-y方向这两个方向驱动。
131.具体而言,回位滑架100具有底壁部101、纵壁部102和侧壁部103。此外,在回位滑架100上设置有海绵104。
132.底壁部101被形成为在z方向上具有预定的厚度的板状。纵壁部102从底壁部101的+x方向侧的端部起向+z方向竖立。两个侧壁部103从纵壁部102的y方向的两端部起向-x方向延伸。
133.纵壁部102被安装在滑块44(图3)上。换言之,回位滑架100被滑块44支承。由此,回位滑架100能够沿着导轨42在y方向上进行移动。
134.另外,回位滑架100在把持单元50位于第二位置的情况下,以离开把持单元50的方式位于与把持单元50相比靠+y方向的下游处。换言之,当把持单元50位于第二位置的情况下,在没有海绵104的状态下,在把持单元50与回位滑架100之间会形成有间隙。
135.驱动单元105为驱动部的一个示例,且包括从动滑轮109以及未图示的驱动滑轮、驱动带107和电机108。
136.从动滑轮109相对于驱动滑轮而被配置在-y方向侧的位置处,且以能够旋转的方式被支承框架14支承。从动滑轮109以及驱动滑轮能够围绕沿着x方向的轴部进行旋转。
137.驱动带107被绕挂在从动滑轮109以及驱动滑轮上,且能够进行环绕移动。此外,在驱动带107的一部分上固定有底壁部101。
138.电机108通过从未图示的电源被通电从而被驱动,而使驱动滑轮进行旋转。
139.如此,驱动单元105被构成为,能够在y方向上驱动回位滑架100。
140.驱动单元105在把持单元50处于第二位置的情况下,基于来自控制单元18(图1)的指令而向-y方向驱动回位滑架100。换言之,回位滑架100通过在第二位置处被驱动单元105驱动从而经由海绵104而对把持单元50施加-y方向的按压力,从而使把持单元50向-y方向移动。
141.此外,驱动单元105在把持单元50处于第一位置的情况下,基于来自控制单元18的指令而向+y方向驱动回位滑架100。由此,回位滑架100返回至原点位置。
142.海绵104为缓和部件的一个示例,且被形成为长方体状。此外,海绵104被粘合在-y方向侧的侧壁部103中的-y方向侧的侧面上,且与把持单元50在y方向上对置。
143.海绵104的y方向上的相当于厚度的长度被设定成,在把持单元50处于第二位置的情况下把持单元50和海绵104接触并且海绵104被压缩。也就是说,海绵104在把持单元50向+y方向移动且到达至第二位置时,通过在y方向上发生弹性变形来缓和因回位滑架100和把持单元50的接触而产生的冲击力。
144.接下来,对打印机10的作用进行说明。另外,在利用图1至图9而进行说明的情况下,省略个别的图号的记载。
145.在图10的(a)、(b)、(c)、(d)、(e)中,对于把持单元50以及回位滑架100的状态示出了示意图。省略了布帛m(图1)、海绵104(图4)以及驱动单元105(图4)等的图示。
146.如图10的(a)所示,把持单元50在第二位置处,处于解除状态。回位滑架100位于相对于把持单元50的+y方向的位置处。
147.如图10的(b)所示,通过回位滑架100被驱动单元105向-y方向驱动,从而把持单元50返回至第一位置。
148.如图10的(c)所示,在把持单元50返回至第一位置之后,回位滑架100通过驱动单元105而返回至+y方向的原来的位置。
149.如图10的(d)所示,把持单元50在第一位置处,对胶带27进行把持。
150.如图10的(e)所示,为了对布帛m进行输送,在胶带27向+y方向移动了的情况下,正在把持着胶带27的把持单元50与胶带27一起向+y方向进行移动。此时,通过读取头36读取标尺部34的磁性标尺,从而将把持单元50的+y方向上的距第一位置的移动距离作为胶带27的+y方向的移动距离而检测出。
151.在图11中示出了把持单元50的解除状态以及把持状态。实线表示解除状态的各部件的外形,虚线表示把持状态的各部件的外形。
152.在把持单元50的解除状态下,通过在电磁铁72中产生磁场,从而衔铁84被电磁铁72吸引。由此,下杆74向-r方向进行转动。
153.随着下杆74的-r方向的转动,连杆轴64向斜上方进行移动。此时,所移动的连杆轴64通过与凹部88接触,从而对上杆86施加转动力。上杆86通过接受该转动力从而向+r方向进行转动。如此,下杆74的-r方向的转动和上杆86的+r方向的转动连动,从而第一抵接部91与第一面28接触,并且第二抵接部92与第二面29接触。也就是说,胶带27的x方向的两端部通过把持单元50而被把持。
154.另一方面,在通过停止向电磁铁72的通电从而磁场消失了的情况下,衔铁84因自重而从电磁铁72离开。由此,下杆74向+r方向进行转动。
155.随着下杆74的+r方向的转动,而连杆轴64向斜下方进行移动。此时,由于从连杆轴64施加的转动力减少,因此上杆86向-r方向进行转动。如此,下杆74的+r方向的转动和上杆86的-r方向的转动连动,从而第一抵接部91从第一面28离开,并且第二抵接部92从第二面29离开。也就是说,把持单元50成为解除状态。
156.如以上所说明的那样,根据打印机10,在解除状态下,第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元50通过回位滑架100而向-y方向移动时,不再存在第一抵接部91以及第二抵接部92的一方保持与胶带27接触的状态而向-y方向进行移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低。
157.此外,与经由电机以及连杆机构而牵拉上杆86以及下杆74中的至少一方的结构相比,由于无需连杆机构的移动所需的空间部,因此能够使切换部71以及把持单元50小型化。
158.根据打印机10,与上杆86和下杆74被连结于不同的部件上的结构相比,由于通过使上杆86和下杆74都连结于同一个搭载框架57上,从而减少了上杆86和下杆74的相对的组装误差,因此能够抑制在连杆轴64处上杆86和下杆74的相对的位置的偏移。
159.此外,由于被电磁铁72吸引的部分即衔铁84在把持状态下从电磁铁72离开,因此与不离开的情况相比,能够减小下杆74的磁化。由此,在电磁铁72中流通的电流被切断后的下杆74的残留磁化变小,下杆74通过重力的作用而从电磁铁72离开,因此能够通过简易的结构来向解除状态进行切换。
160.根据打印机10,由于在标尺部34中所使用的磁力线的强度与光线的强度相比不容易因灰尘等异物而降低,因此在标尺部34上附着了异物的情况下,能够抑制在读取头36中多个磁铁35的读取精度降低的情况。
161.此外,通过把持单元50被包括支承板17在内的支承架14所支承,从而把持状态下的把持单元50的装置高度方向的位置变得能够调节。即使存在胶带27挠曲而胶带27的位置在厚度方向上偏移的情况,也能够通过该作用而使把持单元50对胶带27进行把持。
162.而且,与把持单元50具备驱动单元105的情况相比,能够抑制机械负载作用于把持单元50的情况。由此,在把持单元50上不会作用除了导轨42以及滑块44其本身所具有的向把持单元50的机械负载以外的机械负载,因此在把持状态的把持单元50沿着-y方向而从第二位置向第一位置移动时,不会存在把持单元50的移动由于机械负载而被阻碍的情况。
163.因此,由于抑制了把持单元50对胶带27进行把持的位置向+y方向偏移的情况,因此能够抑制由把持单元50实施的胶带27的移动量的检测精度降低的情况。
164.根据打印机10,在回位滑架100使把持单元50向-y方向进行移动的情况下,相比于回位滑架100与把持单元50直接接触的情况,能够通过海绵104来缓和作用于把持单元50的
冲击力。由此,能够抑制在把持单元50的动作中发生故障的情况。
165.此外,相比于把持单元50与阻挡件19直接接触的情况,能够通过减震器98来缓和施加于把持单元50的冲击力。由此,能够抑制在把持单元50的动作中发生故障的情况。
166.实施方式2
167.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式2的打印机110详细地进行说明。另外,对于与实施方式1共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。
168.在图12中示出了实施方式2的打印机110的一部分。
169.打印机110在打印机10中代替把持单元50而具备把持单元112,关于其他的结构,基本上为与打印机10相同的结构。把持单元112相对于胶带27的x方向的中央,而被对称地配置在+x方向侧的端部和-x方向侧的端部处。因此,对一个的结构进行说明,并省略另一个的说明。
170.把持单元112具有:第一支承部件113,其对第一抵接部91进行支承;第二支承部件114,其对第二抵接部92进行支承;以及切换部116。另外,虽然把持单元112也具有支承托架52以及搭载框架57,但是省略图示以及说明。读取头36被安装在支承托架52上。
171.第一支承部件113具有:臂部113a,其在x方向上延伸;倾斜部113b,其从臂部113a的-x方向侧的端部起向斜下方延伸;安装部113c,其从倾斜部113b的下端起向-x方向延伸。在安装部113c的+z方向侧的上表面113d上安装有第一抵接部91。
172.第二支承部件114具备:臂部114a,其在x方向上延伸;倾斜部114b,其从臂部114a的-x方向侧的端部起向斜上方延伸;安装部114c,其从倾斜部114b的上端起向-x方向延伸。在安装部114c的-z方向侧的下表面114d上安装有第二抵接部92。
173.倾斜部113b和倾斜部114b通过具有沿着y方向的中心轴的连结销115而以能够进行相对转动的方式进行连结。
174.切换部116具有拉伸弹簧117、电磁铁118和电磁铁119。
175.拉伸弹簧117在z方向上被配置在臂部113a与臂部114a之间,并对臂部113a和臂部114a连接。由此,拉伸弹簧117使相互接近的方向的拉力作用于臂部113a以及臂部114a上。
176.电磁铁118相对于臂部113a而位于+z方向,并通过通电而向+z方向吸引臂部113a。
177.电磁铁119相对于臂部114a而位于-z方向,并通过通电而向-z方向吸引臂部114a。
178.在把持单元112中,在向电磁铁118、电磁铁119通电的情况下,臂部113a在对抗拉伸弹簧117的拉力的同时向+z方向被吸引,臂部114a在对抗拉伸弹簧117的拉力的同时向-z方向被吸引。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92分离,从而把持单元112成为解除状态。
179.此外,在把持单元112中,在未向电磁铁118、电磁铁119通电的情况下,由于拉伸弹簧117的拉力发挥作用,从而臂部113a以及臂部114a被拉向相互接近的方向。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元112成为把持状态。
180.根据打印机110,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元112通过回位滑架100而向-y方向进行移动时,不会存在第一抵接部91以及第二抵接部92的一方保持与胶带27接触的状态而向-y方向移动的情况,即,抑
制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
181.实施方式3
182.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式3的打印机120详细地进行说明。另外,对于与实施方式1、实施方式2共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。在共同的部分中也包括一部分的长度有所不同的结构。
183.在图13中示出了实施方式3的打印机120的一部分。
184.打印机120在打印机110中代替把持单元112而具备把持单元122,关于其他的结构,基本上为与打印机110相同的结构。把持单元122在胶带27的+x方向侧的端部和-x方向侧的端部处,相对于x方向的中央而被对称地配置。因此,对一个的结构进行说明,并省略另一个的说明。
185.把持单元122具有:第一支承部件113,其对第一抵接部91进行支承;第二支承部件114,其对第二抵接部92进行支承;以及切换部124。另外,虽然把持单元122也具有读取头36、支承托架52以及搭载框架57,但是省略图示以及说明。
186.倾斜部113b以及倾斜部114b的各自的倾斜方向的长度与第二实施方式的倾斜部113b以及倾斜部114b相比而较长。
187.切换部124具有两个拉伸弹簧117和一个电磁铁126。
188.一个拉伸弹簧117对臂部113a和上板部59进行连接,并使+z方向的拉力作用于臂部113a上。另一个拉伸弹簧117对臂部114a和底壁53进行连接,并使-z方向的拉力作用于臂部114a上。
189.电磁铁126在z方向上位于臂部113a与臂部114a之间,且通过通电而向-z方向吸引臂部113a并且向+z方向吸引臂部114a。
190.在把持单元122中,在未向电磁铁126通电的情况下,由于拉伸弹簧117的拉力发挥作用,从而臂部113a被拉向+z方向,臂部114a被拉向-z方向。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92分离,从而把持单元122成为解除状态。
191.此外,在把持单元122中,在向电磁铁126通电的情况下,臂部113a在对抗拉伸弹簧117的拉力的同时向-z方向被吸引,臂部114a在对抗拉伸弹簧117的拉力的同时向+z方向被吸引。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元122成为把持状态。
192.根据打印机120,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元122通过回位滑架100而向-y方向进行移动时,不会存在第一抵接部91以及第二抵接部92中的一方保持与胶带27接触的状态而向-y方向移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
193.实施方式4
194.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式4的打印机130详细地进行说明。另外,对于与实施方式1至实施方式3共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。在共同的部分中也包括一部分的长度有所不同的结构。
195.在图14中示出了实施方式4的打印机130的一部分。
196.打印机130在打印机110中代替把持单元112而具备把持单元132,关于他的结构,基本上为与打印机110相同的结构。把持单元132在胶带27的+x方向侧的端部和-x方向侧的端部处,相对于x方向的中央而被对称地配置。因此,对一个的结构进行说明,并省略另一个的说明。
197.把持单元132具有:第一支承部件113,其对第一抵接部91进行支承;第二支承部件114,其对第二抵接部92进行支承;以及切换部134。另外,虽然把持单元132也具有读取头36、支承托架52以及搭载框架57,但是省略图示以及说明。
198.切换部134具有拉伸弹簧117、凸轮部件136和电机138。
199.拉伸弹簧117对臂部113a和臂部114a进行连接,并使相互接近的方向的拉力作用于臂部113a以及臂部114a上。
200.凸轮部件136在从y方向进行观察时被形成为椭圆形状。此外,在凸轮部件136上设置有支轴137,该支轴137具有穿过凸轮部件136的中心且沿着y方向的中心轴。支轴137以能够转动的方式被侧板部58支承。
201.电机138通过使支轴137转动,从而使凸轮部件136转动。
202.在把持单元132中,在凸轮部件136的长轴成为了沿着x方向的配置的情况下,由于拉伸弹簧117的拉力发挥作用,从而臂部113a以及臂部114a被拉向相互接近的方向。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元132成为把持状态。
203.此外,在把持单元132中,在通过电机138而使凸轮部件136进行转动、且凸轮部件136的长轴成为沿着与x方向交叉的方向的配置的情况下,臂部113a在对抗拉伸弹簧117的拉力的同时向+z方向被按压,臂部114a在对抗拉伸弹簧117的拉力的同时向-z方向被按压。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元132成为把持状态。
204.根据打印机130,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元132通过回位滑架100而向-y方向进行移动时,不会存在第一抵接部91以及第二抵接部92中的一方保持与胶带27接触的状态而向-y方向移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
205.实施方式5
206.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式5的打印机140详细地进行说明。另外,对于与实施方式1至实施方式4共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。在共同的部分中也包括一部分的长度有所不同的结构。
207.在图15中示出了实施方式5的打印机140的一部分。
208.打印机140在打印机130中代替把持单元132而具备把持单元142,关于其他的结构,基本上为与打印机130相同的结构。把持单元142在胶带27的+x方向侧的端部和-x方向侧的端部处,相对于x方向的中央而被对称地配置。因此,对一个的结构进行说明,并省略另一个的说明。
209.把持单元142具有:第一支承部件113,其对第一抵接部91进行支承;第二支承部件
114,其对第二抵接部92进行支承;以及切换部144。另外,虽然把持单元142也具有读取头36、支承托架52以及搭载框架57,但是省略图示以及说明。
210.切换部144具有两个按压弹簧146、凸轮部件136和电机138。
211.一个按压弹簧146对臂部113a和上板部59进行连接,且使-z方向的按压力作用于臂部113a上。另一个按压弹簧146对臂部114a和底壁53进行连接,且使+z方向的按压力作用于臂部114a上。
212.在把持单元142中,在凸轮部件136的长轴成为沿着x方向的配置的情况下,臂部113a向-z方向被按压,臂部114a向+z方向被按压。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元122成为把持状态。
213.此外,在把持单元142中,在通过电机138而使凸轮部件136进行转动、且凸轮部件136的长轴成为沿着与x方向交叉的方向的配置的情况下,臂部113a在对抗按压弹簧146的按压力的同时向+z方向被按压,臂部114a在对抗按压弹簧146的按压力的同时向-z方向被按压。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92分离,从而把持单元142成为解除状态。
214.根据打印机140,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元142通过回位滑架100向-y方向进行移动时,不会存在第一抵接部91以及第二抵接部92中的一方保持与胶带27接触的状态而向-y方向进行移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
215.实施方式6
216.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式6的打印机150详细地进行说明。另外,对于与实施方式1至实施方式5共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。在共同的部分中也包括一部分的长度有所不同的结构。
217.在图16中示出了实施方式6的打印机150的一部分。
218.打印机150在打印机110中代替把持单元112而具备把持单元152,关于其他的结构,基本上为与打印机10相同的结构。把持单元152在胶带27的+x方向侧的端部和-x方向侧的端部处,相对于x方向的中央而被对称地配置。因此,对一个的结构进行说明,并省略另一个的说明。
219.把持单元152具有:第一支承部件113,其对第一抵接部91进行支承;第二支承部件114,其对第二抵接部92进行支承;以及切换部154。另外,虽然把持单元152也具有读取头36、支承托架52以及搭载框架57,但是省略图示以及说明。臂部113a、114a以及倾斜部113b、114b的长度与实施方式2的结构相比较长。
220.切换部154具有拉伸弹簧117、齿条155、齿条156、小齿轮157和电机138。
221.拉伸弹簧117对臂部113a和臂部114a进行连接,且使相互接近的方向上的拉力作用于臂部113a以及臂部114a上。
222.齿条155被配置在相对于臂部113a的-z方向处。齿条155的+z方向侧的端部与臂部113a接触。此外,齿条155通过未图示的导向部件而以在z方向上能够移动的方式被支承。在齿条155上形成有多个齿部155a。
223.齿条156被配置在相对于臂部114a的+z方向处。齿条156的-z方向侧的端部与臂部114a接触。此外,齿条156通过未图示的导向部件而以在z方向上能够移动的方式被支承。在齿条156上形成有多个齿部156a。
224.在小齿轮157上设置有支轴158,该支轴158具有穿过小齿轮157的中心且沿着y方向的中心轴。支轴158被侧板部58以能够转动的方式支承。此外,在小齿轮157的外周部上形成有多个齿部157a。多个齿部157a的一部分与多个齿部155a的一部分进行啮合。多个齿部157a的其他的一部分与多个齿部156a的一部分进行啮合。
225.电机138通过使支轴158转动,从而使小齿轮157转动。
226.在把持单元152中,随着通过电机138而使小齿轮157进行转动并且齿条155向+z方向进行移动,而齿条156向-z方向进行移动。在此,在从齿条155以及齿条156作用于臂部113a以及臂部114a的按压力大于拉伸弹簧117的拉力的情况下,臂部113a向+z方向被推上去,臂部114a向-z方向被推下去。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92分离,从而把持单元152成为解除状态。
227.此外,在把持单元152中,在通过电机138而使小齿轮157向反方向进行转动的情况下,随着齿条155向-z方向进行移动,而齿条156向+z方向进行移动。在此,在拉伸弹簧117的拉力大于从齿条155以及齿条156作用于臂部113a以及臂部114a上的按压力的情况下,臂部113a和臂部114a靠近。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动,第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元152成为把持状态。
228.根据打印机150,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元152通过回位滑架100而向-y方向被移动时,不会存在第一抵接部91以及第二抵接部92中的一方保持与胶带27接触的状态而向-y方向移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
229.实施方式7
230.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式7的打印机160详细地进行说明。另外,对于与实施方式1至实施方式6共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。在共同的部分中也包括一部分的长度有所不同的结构。
231.在图17中示出了实施方式7的打印机160的一部分。
232.打印机160在打印机150中代替把持单元152而具备把持单元162,关于其他的结构,基本上为与打印机150相同的结构。把持单元162在胶带27的+x方向侧的端部和-x方向侧的端部处,相对于x方向的中央而被对称地配置。因此,对一个的结构进行说明,并省略另一个的说明。
233.把持单元162具有:第一支承部件113,其对第一抵接部91进行支承;第二支承部件114,其对第二抵接部92进行支承;以及切换部164。另外,虽然把持单元162也具有读取头36、支承托架52以及搭载框架57,但是省略图示以及说明。臂部113a、臂部114a以及倾斜部113b、倾斜部114b的长度与实施方式6的结构相同。
234.切换部164具有两个按压弹簧146、齿条155、齿条156、小齿轮157和电机138。
235.一个按压弹簧146对臂部113a和上板部59进行连接,且使-z方向的按压力作用于
臂部113a上。另一个按压弹簧146对臂部114a和底壁53进行连接,且使+z方向的按压力作用于臂部114a上。
236.在把持单元162中,随着通过电机138而使小齿轮157进行转动且齿条155向+z方向进行移动,而齿条156向-z方向进行移动。在此,在从齿条155以及齿条156作用于臂部113a以及臂部114a上的按压力大于按压弹簧146的按压力的情况下,臂部113a向+z方向被推上去,臂部114a向-z方向被推下去。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动、第一抵接部91和第二抵接部92分离,从而把持单元162成为解除状态。
237.此外,在把持单元162中,在通过电机138而使小齿轮157向反方向进行转动的情况下,随着齿条155向-z方向进行移动,而齿条156向+z方向进行移动。在此,在两个按压弹簧146的按压力大于从齿条155以及齿条156作用于臂部113a以及臂部114a的按压力的情况下,臂部113a和臂部114a接近。由此,第一支承部件113以及第二支承部件114以连结销115为中心进行转动、第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元162成为把持状态。
238.根据打印机160,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元162通过回位滑架100而向-y方向被移动时,不会存在第一抵接部91以及第二抵接部92中的一方保持与胶带27接触的状态而向-y方向移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
239.实施方式8
240.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式8的打印机170详细地进行说明。另外,对于与实施方式1至实施方式7共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。在共同的部分中也包括一部分的长度有所不同的结构。
241.在图18中示出了实施方式8的打印机170的一部分。
242.打印机170在打印机10中代替把持单元50而具备把持单元172,关于其他的结构,基本上为与打印机10相同的结构。把持单元172在胶带27的+x方向侧的端部和-x方向侧的端部处,相对于x方向的中央而被对称地配置。因此,对一个的结构进行说明,并省略另一个的说明。
243.把持单元172具有:第一支承部件173,其对第一抵接部91进行支承;第二支承部件174,其对第二抵接部92进行支承;导向部件176;以及切换部178。另外,虽然把持单元172也具有读取头36以及支承托架52,但是省略图示以及说明。
244.第一支承部件173具有:臂部173a,其在x方向上延伸;纵部173b,其从臂部173a的-x方向侧的端部起向-z方向延伸;以及安装部173c,其从纵部173b的下端起向-x方向延伸。在安装部173c的-z方向侧的下表面173d上安装有第一抵接部91。在臂部173a的y方向的两端部上分别设置有具有沿着y方向的中心轴的两个销175a。
245.第二支承部件174具有:臂部174a,其在x方向上延伸;纵部174b,其从臂部174a的-x方向侧的端部起向+z方向延伸;安装部174c,其从纵部174b的上端起向-x方向延伸。在安装部174c的+z方向侧的上表面174d上安装有第二抵接部92。在臂部174a的y方向的两端部上分别设置有具有沿着y方向的中心轴的两个销175b。两个销175b沿着后述的槽部177而向+z方向被引导。
246.导向部件176被形成为,在y方向上具有预定的厚度的板状。此外,导向部件176以使后述的槽部177在y方向上对置的方式在支承托架52上于y方向上隔开间隔地被设置有两个。另外,对-y方向侧的导向部件176进行说明,并省略+y方向侧的导向部件176的说明。
247.在导向部件176的+y方向侧的侧面上形成有两个槽部177。两个槽部177在x方向上隔开间隔地被配置,且分别在z方向上延伸。此外,两个槽部177均向+y方向开口。另外,也可以为,销175b被设置在导向部件176上,且槽部177被形成在第一支承部件173以及第二支承部件174上。
248.切换部178具有一个拉伸弹簧117、电磁铁118和电磁铁119。
249.拉伸弹簧117在z方向上对臂部173a和臂部174a进行连接。由此,拉伸弹簧117使相互接近的方向的拉力作用于臂部173a以及臂部174a上。
250.电磁铁118相对于臂部173a而位于+z方向处,并通过通电而向+z方向吸引臂部173a。
251.电磁铁119相对于臂部174a而位于-z方向处,并通过通电而向-z方向吸引臂部174a。
252.在把持单元172中,在向电磁铁118、电磁铁119通电的情况下,臂部173a在对抗拉伸弹簧117的拉力的同时向+z方向被吸引,臂部174a在对抗拉伸弹簧117的拉力同时向-z方向被吸引。由此,第一抵接部91和第二抵接部92分离,从而把持单元172成为解除状态。
253.此外,在把持单元172中,在未向电磁铁118、电磁铁119通电的情况下,由于拉伸弹簧117的拉力发挥作用,从而臂部173a以及臂部174a被拉向相互接近的方向。由此,第一支承部件173以及第二支承部件174在z方向上接近、第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元172成为把持状态。
254.根据打印机170,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元172通过回位滑架100而向-y方向被移动时,不会存在第一抵接部91以及第二抵接部92中的一方保持与胶带27接触的状态而向-y方向移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
255.实施方式9
256.接下来,作为本发明所涉及的记录装置的一个示例,参照附图对实施方式9的打印机180详细地进行说明。另外,对于与实施方式1至实施方式8共同的部分标记相同的符号,并省略其说明以及个别的图号的记载。在共同的部分中也包括一部分的长度有所不同的结构。
257.在图19中示出了实施方式9的打印机180的一部分。
258.打印机180在打印机10中代替把持单元50而具备把持单元182,关于其他的结构,基本上为与打印机10相同的结构。把持单元182在胶带27的+x方向侧的端部和-x方向侧的端部处,相对于x方向的中央而被对称地配置。因此,对一个的结构进行说明,并省略另一个的说明。
259.把持单元182具有第一抵接部91以及第二抵接部92、支承部件183和切换部186。另外,虽然把持单元182也具有读取头36以及支承托架52,但是省略图示以及说明。
260.支承部件183具有第一臂部184a、第一安装部184b、第二臂部185a和第二安装部185b,且它们成为一体。
261.第一臂部184a向斜上方延伸。第二臂部185a向斜下方延伸。第一臂部184a的+x方向侧的端部和第二臂部185a的+x方向侧的端部被结合。
262.第一安装部184b从第一臂部184a的-x方向侧的端部起向-x方向延伸。在第一安装部184b的-z方向侧的下表面184c上安装有第一抵接部91。
263.第二安装部185b从第二臂部185a的-x方向侧的端部起向-x方向延伸。在第二安装部185b的+z方向侧的上表面185c上安装有第二抵接部92。
264.切换部186具有拉伸弹簧117、电磁铁118和电磁铁119。
265.拉伸弹簧117在z方向上对第一臂部184a和第二臂部185a进行连接。由此,拉伸弹簧117使相互接近的方向的拉力作用于第一臂部184a以及第二臂部185a上。另外,也可以不使用拉伸弹簧117,而利用支承部件183的复原力。
266.电磁铁118相对于第一安装部184b而位于+z方向处,并通过通电而向+z方向吸引第一安装部184b。
267.电磁铁119相对于第二安装部185b而位于-z方向处,并通过通电而向-z方向吸引第二安装部185b。
268.在把持单元182中,在向电磁铁118、电磁铁119通电的情况下,第一安装部184b在对抗拉伸弹簧117的拉力的同时向+z方向被吸引,第二安装部185b在对抗拉伸弹簧117的拉力的同时向-z方向被吸引。由此,第一抵接部91和第二抵接部92分离,从而把持单元182成为解除状态。
269.此外,在把持单元182中,在未向电磁铁118、电磁铁119通电的情况下,由于拉伸弹簧117的拉力发挥作用,从而第一安装部184b以及第二安装部185b相互接近。由此,第一抵接部91和第二抵接部92对胶带27进行把持,从而把持单元182成为把持状态。
270.根据打印机180,在解除状态下第一抵接部91以及第二抵接部92从胶带27分离。由此,在解除状态的把持单元182通过回位滑架100而向-y方向进行移动时,不会存在第一抵接部91以及第二抵接部92中的一方保持与胶带27接触的状态而向-y方向移动的情况,即,抑制了在胶带27上产生摩擦的情况,因此能够抑制胶带27的耐久性降低的情况。
271.虽然本发明的实施方式1至实施方式9所涉及的打印机10至打印机180为,将具有如以上所述那样的结构设为基本结构的打印机,但是当然能够进行在不脱离本技术发明的主旨的范围内的局部性结构的变更或省略等。以下,对各变形例进行说明。
272.在图20中,作为实施方式2的打印机110中的把持单元112的变形例,而示出了把持单元192。
273.虽然把持单元192在于倾斜部114b上设置有连结销115这一点上与实施方式2的结构相同,但是在于倾斜部113b上形成有孔部194这一点上与实施方式2的结构不同。另外,在连结销115上形成有未图示的扁平状的轴部。
274.孔部194具有两个圆形部194a和直线部194b,连结销115在所述圆形部194a能够转动,所述直线部194b对两个圆形部194a进行连接。另外,省略了两个圆形部194a中的一个的图示。
275.圆形部194a的大小成为,能够供连结销115的轴部插穿的大小并且连结销115不会脱落的大小。
276.直线部194b的大小成为,能够供连结销115的轴部插穿的大小并且连结销115不能
插穿的大小。在直线部194b中,当连结销115的轴部成为预定的姿势的情况下,能够从一个圆形部194a向另一个圆形部194a进行移动。
277.在把持单元192中,通过对连结销115的位置进行变更,从而变更从成为支点的连结销115起至第一抵接部91以及第二抵接部92为止的距离。由此,在把持单元192中,能够对由第一抵接部91和第二抵接部92把持的把持力进行调节。
278.也可以设为,在打印机10中,由铁磁体构成上杆86,且通过使电磁铁72对上杆86进行吸引,从而将把持单元50设为把持状态。此外,也可以设为,由铁磁体构成上杆86以及下杆74双方,且通过使电磁铁72对上杆86以及下杆74进行吸引,从而将把持单元50设为把持状态。
279.此外,上杆86和下杆74也可以与不同的部件连结。
280.而且,也可以使电磁铁72和衔铁84接触。
281.在打印机10中,也可以代替磁性标尺,将标尺部34变更为光学性地读取的标尺。此外,也可以将由读取头36读取的被读取部设置在把持单元50上,将相当于读取头36的读取部设置在支承框架14上。
282.此外,也可以对支承框架14的z方向的位置进行固定。而且,也可以不驱动回位滑架100,而以手动的方式将把持单元50回位至+y方向的上游位置。
283.作为缓和部件,也可以代替海绵104而使用橡胶等具有弹性的部件。此外,也可以将缓和部件设置在把持单元50上。而且,也可以将缓和部件设置在回位滑架100以及把持单元50两方上。
284.也可以在把持单元50上不设置减震器98。
285.另外,上述的打印机10的变形例的结构能够与打印机110至打印机180的结构配合地应用。
286.介质并不限定于布帛m,也可以为纸张、其他的片材。
287.记录部并不限定于如记录头22那样以串行方式进行记录的部件,也可以为以行式头的方式进行记录的部件。此外,记录部也可以为进行电子照相方式的记录的部件。
288.输送带并不限定于胶带27,也可以为不进行介质的吸附的带。此外,作为介质向输送带的吸附方式,除了已述的吸附方式以外,也可以使用如下各种吸附力产生机构,即,利用了通过施加电压而产生的静电力的静电吸附方式、利用了压缩机的真空吸引方式、多个微小突起被设置于第一面28上的分子间力方式等。此外,也可以由硅酮橡胶、丁基橡胶等有机高分子材料来构成输送带,也可以通过材料本身所具有的粘着性而使介质被吸附在输送部件上。即,也可以不涂敷粘合剂。
289.符号说明
290.10
…
打印机;12
…
主体框架;14
…
支承框架;15
…
底板部;16
…
侧板部;17
…
支承板;18
…
控制单元;19
…
阻挡件;19a
…
横部;19b
…
纵部;20
…
记录单元;22
…
记录头;24
…
滑架;26
…
输送单元;27
…
胶带;28
…
第一面;28a
…
平面;29
…
第二面;31
…
驱动辊;32
…
从动辊;34
…
标尺部;35
…
磁铁;36
…
读取头;40
…
导向单元;42
…
导轨;44
…
滑块;46
…
滑块;50
…
把持单元;51
…
螺栓;52
…
支承托架;53
…
底壁;54
…
纵壁;54a
…
加宽部;55
…
纵壁;56
…
凸缘;57
…
搭载框架;58
…
侧板部;58a
…
切口部;58b
…
贯穿孔;58c
…
贯穿孔;58d
…
长孔;59
…
上板部;59a
…
上表面;61
…
被安装部;62
…
第一轴;63
…
第二轴;64
…
连杆轴;65a
…
螺栓;65b
…
螺栓;65c
…
螺栓;66
…
固定框架;67
…
板部;68
…
突出部;71
…
切换部;72
…
电磁铁;74
…
下杆;74a
…
基部;74b
…
倾斜部;74c
…
下部;74d
…
延伸部;74e
…
切口部;75a
…
贯穿孔;75b
…
贯穿孔;76
…
上部件;77
…
安装部;79
…
螺钉;81
…
螺栓;84
…
衔铁;84a
…
主体部;84b
…
安装部;86
…
上杆;86a
…
基部;86b
…
纵部;86c
…
凸缘部;86d
…
延伸部;87
…
连接部件;88
…
凹部;88a
…
曲面;89a
…
贯穿孔;89b
…
贯穿孔;91
…
第一抵接部;92
…
第二抵接部;94
…
安装部;95
…
底壁;96
…
纵壁;97
…
螺栓;98
…
减震器;98a
…
主体部;98b
…
可动部;100
…
回位滑架;101
…
底壁部;102
…
纵壁部;103
…
侧壁部;103a
…
侧面;104
…
海绵;105
…
驱动单元;107
…
驱动带;108
…
电机;109
…
从动滑轮;110
…
打印机;112
…
把持单元;113
…
第一支承部件;113a
…
臂部;113b
…
倾斜部;113c
…
安装部;113d
…
上表面;114
…
第二支承部件;114a
…
臂部;114b
…
倾斜部;114c
…
安装部;114d
…
下表面;115
…
连结销;116
…
切换部;117
…
拉伸弹簧;118
…
电磁铁;119
…
电磁铁;120
…
打印机;122
…
把持单元;124
…
切换部;126
…
电磁铁;130
…
打印机;132
…
把持单元;134
…
切换部;136
…
凸轮部件;137
…
支轴;138
…
电机;140
…
打印机;142
…
把持单元;144
…
切换部;146
…
按压弹簧;150
…
打印机;152
…
把持单元;154
…
切换部;155
…
齿条;155a
…
齿部;156
…
齿条;156a
…
齿部;157
…
小齿轮;157a
…
齿部;158
…
支轴;160
…
打印机;162
…
把持单元;164
…
切换部;170
…
打印机;172
…
把持单元;173
…
第一支承部件;173a
…
臂部;173b
…
纵部;173c
…
安装部;173d
…
下表面;174
…
第二支承部件;174a
…
臂部;174b
…
纵部;174c
…
安装部;174d
…
上表面;175a
…
销;175b
…
销;176
…
导向部件;177
…
槽部;178
…
切换部;180
…
打印机;182
…
把持单元;183
…
支承部件;184a
…
第一臂部;184b
…
第一安装部;184c
…
下表面;185a
…
第二臂部;185b
…
第二安装部;185c
…
上表面;186
…
切换部;192
…
把持单元;194
…
孔部;194a
…
圆形部;194b
…
直线部;l
…
长度;m
…
布帛;ma
…
被记录面;mb
…
背面。