1.本实用新型涉及一种小型航空器使用的遥控地面移动设备,特别是一种通过托起和限制航空器机轮来完成地面移动的航空器地面设备。
背景技术:
2.现有的航空器地面移动方式,一是航空器依靠自己的动力装置自主移动,二是靠地面牵引车和牵引杆实现,第三,通过近年出现的抱轮式拖车进行。首先自主移动是最简单的,但遇到在狭窄空间内移动时,由于飞机的座舱和机翼端部的距离较远,驾驶员很难正确判断航空器与地面障碍物的空间关系,容易发成地面碰撞事故,造成人员和财产损失。同时因为航空器动力装置购置,维护和使用价格高昂,靠自主移动的方式在成本上不合算。如果依靠牵引杆和拖车拖动,由于牵引杆和拖车组合后的尺寸较大,存在狭窄空间内移动不方便的问题。
3.近些年出现了一种抱轮式拖车,通过将前轮固定后,托起离开地面,然后拖车通过起落架带动航空器在地面移动。抱轮拖车技术先进,移动灵活,但因为大量采用液压,机电控制系统,所以存在购置和使用成本高,技术复杂,故障率高的问题。
技术实现要素:
4.本实用新型的目的,是提供一种低成本,使用简单,可靠性高的,适用于小型航空器,包括无人机和大型模型飞机的经济,灵活的地面移动装置。
5.为解决上述技术问题,本实用新型采用的技术方案是:
6.一种航空器地面移动装置,包括平台机构,动力、控制机构,行走装置;其特征在于工作时航空器的一个起落架被限制在平台机构上,由本航空器地面移动装置控制航空器地面移动;
7.所述平台机构包括前挡杆和后挡板,前挡杆和后挡板通过连杆连接,保持联动。
8.优选地,工作时,通过所述前挡杆和后挡板在锁定机构的作用下锁定位置后,限制航空器的机轮在平台机构上的活动范围。
9.优选地,所述后挡板在锁定机构松开后,向后转动到上端接触地面,在平台机构和地面之间形成跳板结构。
10.优选地,所述前挡杆的锁止杆是通过航空器机轮的推动进入锁定位置,实现锁住位置的功能。
11.本实用新型可以保证航空器在地面迅速,安全,灵活的移动,且可以通过遥控实现航空器从地面移动到装载平台上,触发锁定机构上锁,将航空器机轮限制在平台范围内。在移动到位后,可以实现遥控解锁,航空器从装载平台上移动到地面,全程可以不用人力接触航空器。
12.本实用新型的特征是以装载平台为主体的地面移动装置,平台前有前挡杆,平台后侧有后挡板,前挡杆和后挡板靠连杆连接,实现协同动作,共同组成航空器位置限定机
构。当后挡板放下时,一段接触地面,形成跳板结构,方便航空器移动到平台上,以及从平台上移动到地面。在前挡杆前部有锁定机构,当前挡杆向前移动到位时,锁定机构动作,将前挡杆锁定位置,同时连杆拉动后挡板升起,并锁定,前挡杆,后挡板以及两侧的连杆共同限制住航空器的机轮,保证机轮的活动范围不超出平台。
13.本实用新型的特点:
14.一是体积小,当工作时,移动装置位于航空器的前轮(或后轮)之下,基本不超出航空器的地面投影面积,不需要额外的操作空间就可以实现航空器的移动。
15.二是重量轻。传统拖车为了保证有足够的地面摩擦力来实现拖动航空器以及制动的需要,往往需要选择自重很大的车辆,或者采用增加自重的方法,来得到足够的地面摩擦力。而本实用新型的移动装置,本身就负载起了航空器的重量,自身的重量加上航空器的重量一起,就可以保证工作时有足够的摩擦力,来产生足够的牵引力和制动力。
16.第三是本实用新型没有采用复杂的电气控制装置以及液压机构,只靠机械结构,就可以实现航空器机轮上锁,开锁的功能,具有结构简单,成本低,可靠性高的优点。
17.第四是因为采用的是平台托住前轮的方法,和市面上其他的抱轮式拖车相比,不需要断开航空器的转弯机构,免去了一个操作步骤的同时,也减少了出现操作失误的可能。
18.第五是适用的航空器种类广泛,只要是采用三点式起落架的航空器,不论是普通固定翼飞机,还是直升机,或者其他类型的航空器,只要在本航空器地面移动装置的尺寸和负载允许下,都可以通过将前三点起落架的前轮,或者后三点起落架的后轮,移动到平台上,限定住位置之后进行航空器的地面移动,对航空器类型适应广泛。
附图说明
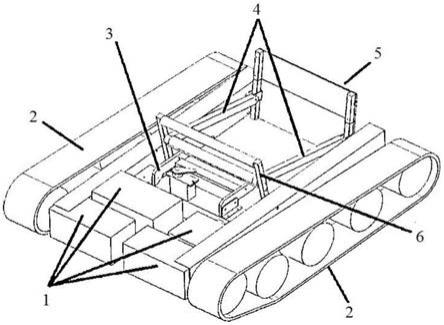
19.图1为本实用新型结构示意图(锁闭状态);
20.图2为本实用新型使用状态示意图(牵引状态);
21.图3为本实用新型使用状态示意图(移动状态);
22.图4为本实用新型使用状态示意图(回复状态)。
23.在图中:
24.1、动力、控制、电源机构;2、行走装置;3、锁定机构;4、连杆;5、后挡板;6、前挡杆;7、前轮。
具体实施方式
25.以下以前三点式航空器为例结合附图来对本发明做进一步描述。
26.图1为本发明的外观示意图,图1中为挡杆锁止状态。
27.本实用新型的动力装置,以及电源,控制装置位于前部,横梁之前以及横梁之上。两侧的纵梁外侧为行走装置2,横梁后部是负载平台。负载平台前部,紧靠横梁后部的是前挡杆6,前挡杆6由左右竖杆和两侧的连杆4,以及锁止杆组成,两侧竖杆的下端和两侧的纵梁通过转轴连接。连杆4的两端连接前端的竖杆和后端的跳板,跳板为一块硬质材料的厚板,前段的两侧通过转轴连接到纵梁,中间的两侧通过转轴连接到连杆4,保证和前挡杆6的协调动作。平台为一块硬质材料板,固定在纵梁的下侧,用以负载航空器的重量。
28.如图2所示,当准备进行航空器牵引时,先操作航空器主轮刹车,然后操纵本实用
新型行驶到航空器前轮7处,操纵开锁机构3松开前挡杆6,前挡杆6和后挡板5就可以在重力或者其他机构辅助下向后转动,后挡板5上端接触地面,在平台和地面之间形成一个跳板机构。然后操纵本实用新型后退,将跳板机构塞入前轮和地面之间的间隙,将前轮7顶起,并通过跳板机构移动到平台上。
29.如图3所示,当前轮7向前移动与平台前端放倒状态的前挡杆6接触时,开始推动前挡杆6向前移动。
30.如图4所示,当前轮推动前挡杆6的锁止杆向前移动到锁定机构3的挂钩位置时,开始推动挂钩下移。一直到锁止杆越过挂钩的最高点,挂钩开始回位,勾住锁止杆,此时前挡杆5被锁住,并通过连杆4将后挡板5固定,前轮此时前后位置被限制在前挡杆6和后挡板5之间,左右位置被限制在左右连杆4之间。
31.确定前挡杆6被锁定后,就可以松开航空器的刹车,此时就可以遥控操纵本实用新型,通过行走机构2,带动航空器地面移动。当进行转弯时,因为航空器的前轮并没有完全固定,在平台上还是可以进行一定程度的转动,所以不需要将航空器前轮转弯机构断开,免去了一个容易出现失误的操作步骤。
32.当移动到合适的位置后,再次将航空器刹车,然后操作松开前挡杆6锁定机构3,挂钩脱开锁止杆,前挡杆6和后挡板5向后转动,后挡板5接触地面形成跳板机构,然后操作本实用新型向前移动,航空器的前轮7从平台上和跳板移动到地面,航空器牵引工作完成。
技术特征:
1.一种航空器地面移动装置,包括平台机构,动力、控制机构,行走装置(2);其特征在于工作时航空器的一个起落架被限制在平台机构上,由本航空器地面移动装置控制航空器地面移动;所述平台机构包括前挡杆(6)和后挡板(5),前挡杆(6)和后挡板(5)通过连杆(4)连接,保持联动。2.根据权利要求1所述的航空器地面移动装置,其特征在于,工作时,通过所述前挡杆(6)和后挡板(5)在锁定机构(3)的作用下锁定位置后,限制航空器的机轮(7)在平台机构上的活动范围。3.根据权利要求1所述的航空器地面移动装置,其特征在于,所述后挡板(5)在锁定机构(3)松开后,向后转动到上端接触地面,在平台机构和地面之间形成跳板结构。4.根据权利要求1所述的航空器地面移动装置,其特征在于,所述前挡杆(6)的锁止杆是通过航空器机轮的推动进入锁定位置,实现锁住位置的功能。
技术总结
本实用新型公开了一种航空器地面移动装置,所述航空器地面移动装置包括平台机构,动力、控制机构,行走装置;工作时航空器的一个起落架被限制在平台机构上,由本航空器地面移动装置控制航空器地面移动,前挡杆的锁止杆通过航空器机轮的推动进入锁定位置,实现锁住位置的功能。本实用新型的航空器地面移动装置适用于小型航空器,其成本低,使用简单,可靠性高。可靠性高。可靠性高。
技术研发人员:郭军
受保护的技术使用者:郭军
技术研发日:2021.05.15
技术公布日:2022/1/21