1.本发明属于无人倾转旋翼机飞行控制技术领域,涉及一种无人倾转旋翼机横向机动控制方法。
背景技术:
2.横向机动飞行是无人倾转旋翼机近地机动的主要方式之一,而近地机动性能指标是旋翼飞行器的重要指标之一。无人倾转旋翼机横向机动飞行控制方式有两种:通过横向通道速度控制器生成的旋翼操纵控制指令和配平操纵量控制旋翼横向周期变距或总距差动,实现横向机动飞行。
3.旋翼总距差动控制横向速度的优点为操纵功效较大,缺点为稳定飞行的滚转姿态大(气动阻力大);旋翼横向周期变距控制横向速度的优点为稳定飞行的滚转姿态相对较小(气动阻力小),缺点为操纵功效相对较弱。本发明将无人倾转旋翼机横向机动飞行过程中横向通道速度控制器生成的旋翼操纵控制指令和配平操纵增量分配给旋翼横向周期变距和总距差动,使无人倾转旋翼机横向机动飞行在获得较大加速性能的同时兼具较小的稳定飞行滚转姿态和气动阻力。
技术实现要素:
4.本发明的目的是:针对无人倾转旋翼机横向机动飞行控制,提供了一种无人倾转旋翼机横向机动控制方法,可提升横向机动飞行性能。
5.一种无人倾转旋翼机横向机动控制方法,包括以下步骤:
6.步骤一:以发出横向速度指令的时刻为t0,根据横向速度指令vy_cmd和横向加速度设定值ay计算横向速度软化指令vy_var(t);
7.步骤二:根据横向速度软化指令vt_var(t)和当前横向速度vy(t),计算横向速度操纵控制指令ail_ffc(t);
8.步骤三:由配平操纵量的插值表线性插值计算得到横向速度软化指令vy_var(t)和t0时刻的横向速度软化指令vy_var(t0)分别对应的横向配平操纵量 ail_trim(t)和ail_trim(t0);
9.步骤四:根据横向速度指令vy_cmd和t时刻及t0时刻的横向速度软化指令 vy_var(t)、vy_var(t))计算旋翼横向周期变距系数k_lat(t)和旋翼总距差动系数k_dcol(t);
10.步骤五:根据横向周期变距系数k_lat(t)、横向速度操纵控制指令ail_ffc(t)、横向配平操纵量ail_trim(t)和ail_trim(t0),计算旋翼横向周期变距的操纵控制量 lat_law(t);根据旋翼总距差动系数k_dcol(t)、横向速度操纵控制指令ail_ffc(t)、横向姿态操纵控制指令ail_fbc(t)、横向配平操纵量ail_trim(t)和ail_trim(t0),计算旋翼总距差动的操纵控制量dcol_law(t)。
11.进一步,所述步骤一中,横向速度软化指令vy_var(t)计算公式如下:
[0012][0013]
其中,vy_var(t0)为t0时刻对应的横向速度软化指令,sign为符号函数。
[0014]
进一步,所述步骤二中,横向速度操纵控制指令ail_ffc(t)由横向控制通道的速度控制器计算得到。
[0015]
进一步,所述步骤三中,所述配平操纵量的插值表横坐标为横向速度,纵坐标为旋翼横向周期变距。
[0016]
进一步,所述步骤四中,
[0017]
旋翼横向周期变距系数k_lat(t)计算公式如下:
[0018][0019]
进一步,所述步骤四中,旋翼总距差动系数k_dcol(t)计算公式如下:
[0020]
其中k为旋翼总距差动配平量与横向周期变距配平量的比值。
[0021]
进一步,所述步骤五中,旋翼横向周期变距的操纵控制量lat_law(t)计算公式如下:
[0022]
lat_law(t)=k_lat(t)*(ail_ffc(t)+ail_trim(t)-ail_trim(t0))+ail_trim(t0)。
[0023]
进一步,所述步骤五中,旋翼总距差动的操纵控制量dcol_law(t)计算公式如下:
[0024]
dcol_law(t)=k_dcol(t)*(ail_ffc(t)+ail_trim(t)-ail_trim(t0))+ail_fbc(t)。
[0025]
本发明采用上述技术方案与现有技术相比,具有以下技术效果:
[0026]
1)本发明同时使用旋翼横向周期变距和总距差动进行横向速度控制,使横向机动的加减速飞行阶段具有更优的加减速性能、稳定飞行阶段具有更小的滚转姿态和气动阻力;
[0027]
2)本发明提出了一种无人倾转旋翼机横向机动飞行过程中横向速度控制的操纵分配方法,能够使旋翼横向周期变距和总距差动在各自优势飞行阶段发挥控制作用。
附图说明
[0028]
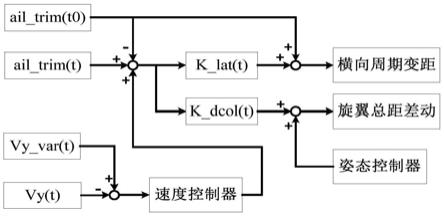
图1为无人倾转旋翼机横向速度控制系统框图,
[0029]
图2为横向机动过程中横向速度软化指令和横向配平操纵量随时间变化曲线,
[0030]
图3为横向机动过程中横向速度操纵控制指令、横向周期变距操纵控制量和总距差动操纵控制量随时间变化曲线,
[0031]
图4为横向机动过程中横向周期变距系数和总距差动系数随时间变化曲线,
[0032]
图5为横向机动过程中横向速度和滚转角随时间变化曲线。
具体实施方式
[0033]
本发明为实施上述发明目的采用如下技术方案:
[0034]
方案总体描述为:在无人倾转旋翼机横向机动飞行过程中,将横向通道速度控制器生成的旋翼操纵控制指令和因横向速度软化指令变化而产生的横向配平操纵增量以不同比例系数分别分配给旋翼横向周期变距和总距差动,如图1所示,在横向机动的加减速过程中,旋翼横向周期变距的分配系数增加,旋翼总距差动的分配系数减小。
[0035]
具体实施步骤:
[0036]
步骤1):以发出横向速度指令的时刻为t0,根据横向速度指令vy_cmd和横向加速度设定值ay,由公式(1)计算横向速度软化指令vy_var(t),其中vy_var(t0)为t0时刻对应的横向速度软化指令;
[0037][0038]
步骤2):根据横向速度软化指令vy_var(t)和当前横向速度vy(t),由横向控制通道的速度控制器计算得到横向速度操纵控制指令ail_ffc(t);
[0039]
步骤3):由横向速度和旋翼横向周期变距配平操纵量的插值表线性插值计算得到横向速度软化指令vy_var(t)和t0时刻横向速度软化指令vy_var(t0)对应的横向配平操纵量ail_trim(t)和ail_trin(t0);
[0040]
步骤4):横向速度控制的操纵量分配给旋翼横向周期变距的系数k_lat(t)和分配给旋翼总距差动的系数k_dcol(t)分别由公式(2)、(3)计算得到,其中k为旋翼总距差动配平量与横向周期变距配平量的比值;
[0041][0042][0043]
步骤5):横向机动飞行过程中旋翼横向周期变距的操纵控制量lat_law(t)和总距差动的操纵控制量dcol_law(t)由公式(4)、(5)计算得到,其中ail_fbc(t)为横向控制通道的姿态控制器计算得到的横向姿态操纵控制指令。
[0044]
lat_law(t)=k_lat(t)*(ail_ffc(t)+ail_trim(t)-ail_trim(t0))+ail_trim(t0)(4)
[0045]
dcol_law(t)=k_dcol(t)*(ail_ffc(t)+ail_trim(t)-ail_trim(t0))+ail_fbc(t)(5)
[0046]
实施案例:
[0047]
步骤1):已知t0时刻横向速度软化指令vy_var(t0)=0m/s、横向加速度设定值ay=1m/s2,给定横向速度指令vy
cmd
=1cm/s,计算横向速度软化指令vy_var(t),如图2所示。
[0048]
步骤2):由速度控制器计算得到横向速度操纵控制指令ail_ffc(t),如图3所示。
[0049]
步骤3):由配平操纵量的插值表计算得到横向配平操纵量ail_trim(t),如图2所示,其中ail_trim(t0)=0.29
°
。
[0050]
步骤4):已知k=0.04,计算得到横向周期变距系数k_lat(t)和总距差动系数k_dool(t),如图4所示。
[0051]
步骤5):计算横向周期变距操纵控制量lat_law(t)和总距差动操纵控制量dcol_law(t),如图3所示。
[0052]
横向机动过程中横向速度和滚转角曲线如图5所示。
[0053]
以上所述,仅为本发明的具体实施例,对本发明进行详细描述,未详尽部分为常规技术。但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。本发明的保护范围应以所述权利要求的保护范围为准。