1.本发明属于飞行器设计领域,是一种适用于太阳能无人机的轻质舵面及铰链结构。
背景技术:
2.太阳能无人机总体方案可行性对结构重量的敏感性高,通常要将结构重量系数控制在35%以内才能实现方案闭环。出于降低巡航功耗、增大受光面积的需求,太阳能无人机翼载荷通常在2.4~6.3kg/m2之间,其机翼面积相比同等起飞质量的传统无人机更大。此外,为降低结构质量,太阳能无人机通常采用复合材料翼面结构,其受热固化过程中,尺寸精度和直线度误差较大,安装精度难以保证。传统无人机舵面结构骨架以实心碳纤维结构为主,结构质量大;蒙皮采用刚性材质以保证高翼载荷下的结构刚度,面密度大,维修成本高;铰链通常为隐藏式结构,转动幅度小,拆装难度大,且难以调节舵面与翼面之间的距离。这种舵面及铰链结构不仅不利于结构质量的降低,而且对复合材料加工精度要求高,维护较为困难,因此不利于太阳能无人机性能及加工工艺的提升。
技术实现要素:
3.为克服上述现有无人机舵面及铰链结构的不足,本发明提供了一种适用于太阳能无人机的轻质舵面及铰链结构,相比传统舵面质量轻,可以快速拆装,并能通过所设计的铰链结构消除复合材料加工误差。
4.本发明适用于太阳能无人机的轻质舵面及铰链结构,其中舵面具有主梁,翼肋,前缘,后缘与蒙皮;主梁上沿展向安装有翼肋;各个翼肋前端与后端分别固定于前缘和后缘上;整体舵面外表面铺设蒙皮。
5.上述舵面通过铰链连接翼面;舵面的主梁、前缘与后缘均设计为复合材料夹层式结构,内部为pmi泡沫材料,外层包裹碳纤维铺层;舵面的翼肋为复合材料包络式结构,外层为碳纤维层,内部为pmi泡沫材料。
6.铰链设计为全向调节铰链,包括托板螺母,转臂,转臂座与调节板。其中,托板螺母固定于主梁上的全向调节铰链安装位置处;转臂后端与托板螺母间螺纹连接固定;转臂前端与转臂座通过展螺相连,形成转动副;转臂座前端开设的连接孔,与调节板背侧中部连接平台上开设的条形孔配合,通过法向螺栓相连,且通过连接平台两侧的挡板限制转臂座的转动;调节板用于连接翼面的后梁。
7.上述转臂通过与托板螺母间的相对旋转调节转轴沿弦向的位置,消除复合材料加工和组装造成的全向调节铰链同轴度误差;通过松开各个全向调节铰链中的法向螺栓,使转臂座沿条形孔移动,实现舵面与翼面间距调节。
8.本发明的优点在于:
9.1、本发明中提出的轻质舵面结构,采用复合材料夹层式主梁、复合材料包络式翼肋、复合材料前缘、复合材料后缘均由碳纤维和pmi泡沫构成,既能保证结构强度和刚度,又
能降低结构重量;
10.2、本发明中提出的轻质舵面采用聚酰亚胺柔性蒙皮结构,一方面在保证蒙皮防撕扯性能的同时大幅降低了重量,另一方面进行结构检修时可以随时破坏和更换蒙皮,维修难度小,成本低;
11.3、本发明中提出的轻质舵面中复合材料夹层式主梁结构,通过
±
45
°
铺层承受扭矩,能够保证柔性蒙皮舵面的刚度,省略斜撑结构,节省结构重量;
12.4、本发明中提出的轻质舵面中复合材料包络式翼肋采用分离式结构,其中前半段与复合材料夹层式主梁采用榫卯方式连接,既提高了连接精度,又保证了主梁结构完整性;
13.5、本发明中提出的铰链结构通过调整转臂在托板螺母上的旋进距离、转臂座在安装板上的安装位置来调整多个铰链的同轴度,同时也用来调节舵面与翼面之间的间隙;
14.6、本发明中提出的轻质舵面通过与翼面垂直的法向螺栓实现与翼面的连接,舵面上预留有作业孔,能够实现舵面的快速拆装,维护简单;
15.7、本发明中提出的轻质舵面能够与翼面间在
±
45
°
范围内顺畅转动,满足极限工况下的大舵偏角需求。
附图说明
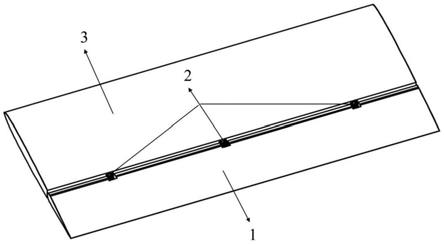
16.图1为本发明适用于太阳能无人机的轻质舵面及铰链结构中舵面与翼面的装配关系图。
17.图2为本发明适用于太阳能无人机的轻质舵面及铰链结构中舵面结构图。
18.图3为本发明适用于太阳能无人机的轻质舵面及铰链结构中全向调节铰链结构图。
19.图4为本发明适用于太阳能无人机的轻质舵面及铰链结构中舵面的作动系统原理图。
20.图5为本发明适用于太阳能无人机的轻质舵面及铰链结构中主梁结构图。
21.图6为本发明适用于太阳能无人机的轻质舵面及铰链结构中翼肋结构图。
22.图7为本发明适用于太阳能无人机的轻质舵面及铰链结构中前缘结构图。
23.图8为本发明适用于太阳能无人机的轻质舵面及铰链结构舵面及铰链处于不同舵偏状态时的相对关系图。
24.图中:
25.1-舵面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2-全向调节铰链
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3-翼面
26.4-作动系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101-主梁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102-翼肋
27.103-前缘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104-后缘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105-蒙皮
28.201-托板螺母
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
202-转臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203-转臂座
29.204-调节板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
205-展向螺栓
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206-法向螺栓
30.401-舵机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
402-作动拉杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
403-舵面摇臂
31.1011-矩形孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1012-圆形孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1021-翼肋前段
32.1022-翼肋后段
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1031-前缘泡沫层
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1032-前缘碳纤维层
具体实施方式
33.下面结合附图进一步对本发明进行说明。
34.本发明适用于太阳能无人机的轻质舵面及铰链结构,设计有复合材料轻质舵面1以及用于该舵面与翼面3连接的全向调节铰链2,通过全向调节铰链2实现复合材料轻质舵面1与翼面3形成旋转轴沿展向的旋转关系,如图1所示。
35.所述复合材料轻质舵面1,包括主梁101,翼肋102,前缘103,后缘104与蒙皮105,如图2所示。
36.其中,主梁101纵截面为矩形,设计为复合材料夹层式结构;其内部为pmi泡沫材料。pmi泡沫材料外层包裹有
±
45
°
碳纤维铺层,用于承受扭转力矩;且在pmi泡沫材料的顶面与
±
45
°
碳纤维铺层之间,以及pmi泡沫材料的底面与
±
45
°
碳纤维铺层之间均设置有0
°
碳纤维铺层,用于承受剪力和弯矩。
37.上述主梁101左右两端端面中部设计有凹槽,在凹槽两端形成两个凸起插头,作为端部翼肋连接位置;主梁101上沿其长方向等间隔开有圆形通孔1012,作为全向调节铰链2的连接位置;在每个圆形通孔1012两侧对称位置开有矩形孔1011,同时相邻两个圆形开孔1012中心连线中点位置开有矩形孔1011;矩形孔1011作为中部翼肋连接位置。
38.所述翼肋102为复合材料包络式结构,整体构型与翼面3所采用的翼型后部一致,如图4所示,包括前段翼肋1021与后段翼肋1022,两段翼肋均为复合材料包络式结构,外层为0
°
/90
°
碳纤维层,内部为pmi泡沫,能在减轻翼肋重量的前提下保证刚度。其中,后段翼肋1022前端设计有楔形凹槽;前段翼肋1021前端设计为圆弧型,以减小舵面1偏转状态下的气动阻力;前段翼肋1021后端设计有插头,且插头前部为楔形部分1023,后部为具有上下平行平面的矩形段1024;由此通过前段翼肋1021的插头前部楔形部分1023与后段翼肋1022的楔形插槽配合,实现前段翼肋1021与后段翼肋1022间的插接,并由低温环氧树脂粘接固定;通过楔形结构插接方式,增大插接位置处的接触面接。同时,在前段翼肋1021与后段翼肋1022插接后,由插头末端矩形段1024的上下平面、前段翼肋1021前端面以及后段翼肋1022后端面间配合,使在整体翼肋102上下对应位置留有两个矩形凹槽,用于配合插接主梁101。
39.上述结构的翼肋102与主梁101间安装时,在主梁101的端部翼肋连接位置处,翼肋102通过上下位置凹槽分别与主梁101端部的两个插头配合插接,并由低温环氧树脂粘接固定。主梁101的中部翼肋连接位置处,翼肋102通过上下位置凹槽分别与矩形孔1011间配合,并由低温环氧树脂粘接固定。装配时先将前段翼肋1021由主梁101前侧插入主梁上的矩形孔1011,随后将后段翼肋1022与前段翼肋1021间插接配合。
40.所述前缘103采用复合材料夹层结构,外侧为0
°
/90
°
碳纤维铺层1032,内侧为一层等厚度的pmi泡沫结构1031;前缘103与翼肋102中前段翼肋1021的前端弧形面配合通过低温环氧树脂粘接固定。如图7所示,前缘103采用多段式结构,主梁101端部的翼肋102与同其相邻的翼肋102间设置一段前缘103,该前缘103两端位置为翼肋102得固定位置;相邻两个全向调节铰链连接位置之间的翼肋与一段前缘103固定,该前缘103两端位置以及中间位置为翼肋固定位置。在上述前缘103上与翼肋102间固定的位置处,只保留碳纤维铺层,无pmi泡沫结构,以增强粘接强度。
41.所述后缘104为复合材料夹层式结构,纵截面为三角形,与翼面3所采用的翼型后缘形状一致,其外侧为0
°
/90
°
碳纤维层,内部为pmi泡沫。后缘104上,对应各个翼肋102所在
位置处无pmi泡沫部分仅保留上下面的碳纤维层,形成翼肋插入位置,各个翼肋102分别与后缘104上对应的翼肋插入位置处插入后缘104,随后通过低温环氧树脂将翼肋102与上下面的碳纤维层间粘接固定。
42.所述蒙皮105采用聚酰亚胺柔性蒙皮,周向覆盖于前述结构的舵面1外表面。蒙皮105内部含有径向和纬向玻纤丝,一方面可以增强蒙皮强度,另一方面可以确保长航时飞行过程中,蒙皮出现局部破损时,不会造成蒙皮大规模撕裂。
43.所述全向调节铰链2,包括托板螺母201,转臂202,转臂座203与调节板204,如图6所示。其中,托板螺母201通过中心两侧相对位置开设的螺孔配合螺栓与复合材料夹层式主梁101固定,固定时通过托板螺母201中部设计的圆筒连接部分与主梁上开设的圆形孔1012间配合对其,以确保两者间定位精度。转臂202后端通过外螺纹与托板螺母201中部圆筒连接部分的内螺纹连接固定;转臂202前端设计有通孔,用于连接转臂座203。转臂座203后端两侧具有相互平行的耳片,两耳片相对位置开设通孔;转臂202前端插入两耳片之间,且使三者上的通孔同轴设置;通过一颗轴线沿展向设置的展向螺栓205由一侧穿过两耳片与转臂202前端的通孔后,配合螺母拧紧,进而由转臂座203的两个耳片对转臂202进行夹持,且保留两者绕展向螺栓205轴线旋转的自由度。转臂座203前端开设的纵向连接孔,用于连接调节板204。调节板204为矩形板,背侧中部设计有连接平台,连接平台中部开有条形孔,通过一颗轴线沿法向的法向螺栓206由一侧穿过转臂座203前端连接孔以及连接平台上的条形孔后,配合螺母拧紧,实现转臂座203与调节板204间的连接固定。同时在连接平台两侧设计有平行的挡板,使转臂座203前端位于两挡板间,且两侧与两挡板贴合,通过两挡板限制转臂座203的转动,如图3所示。调节板204四角处设计有圆孔,通过螺栓穿过圆孔连接翼面3的后梁,实现调节板与翼面3间的固定。由此通过主梁101上各个全向调节铰链2以上述方式与翼面3件进行连接后,实现舵面1与翼面3间的连接。
44.上述转臂202可以通过与托板螺母201间的相对旋转调节转轴沿弦向的位置,从而消除复合材料加工和组装造成的全向调节铰链2同轴度误差。通过松开各个全向调节铰链1中的法向螺栓206,可沿条形孔移动转臂座203,进而实现舵面1与翼面3间距调节,当调整好两者间距后,拧紧法向螺栓206固定当前舵面1位置。
45.轻质舵面1和翼面3之间的相对旋转通过作动系统4实现,作动系统4包括舵机401,作动拉杆402与舵面摇臂403,如图7所示。
46.所述舵面摇臂403具有相互平行的两根侧杆以及两根侧杆间的连接杆。两根侧杆上部通过螺栓跟别固定于舵面1中部的全向调节铰链2两侧的翼肋3上,消除操纵时的不对称力,且使位于舵面1中部全向调节铰链2处于两根侧杆之间。其中一根侧杆底端与作动拉杆402一端的鱼眼轴承通过螺栓连接。作动拉杆402另一端的鱼眼轴承与舵机401的摇臂间通过螺栓连接,形成作动关系。上述舵机401的摇臂长度与舵面摇臂403长度比例为1:1,使得作动系统4的传动比为1:1。由此通过舵机401驱动作动拉杆402以及舵面摇臂403运动,可带动舵面3在
±
45
°
范围内进行作动,不同舵偏状态下的舵面位置及铰链状态,如图8所示。
47.以某小型超长航时太阳能无人机为例,采用传统复合材料舵面与传统铰链时,长2m、宽0.22m的升降舵(含铰链机构)质量为340g,舵面转动范围为
±
35
°
。应用本发明后,舵面质量降低为260g,舵面转动范围可增大至
±
45
°
。