信息处理装置、其控制方法、移动单元及记录介质
1.本技术是国际申请日2017年8月14日、国际申请号 pct/jp2017/029254的国际申请于2019年2月15日进入国家阶段的申请号为201780050052.1、发明名称为“信息处理装置和方法以及记录介质”的专利申请的分案申请,其全部内容结合于此作为参考。
技术领域
2.本公开涉及一种信息处理装置和方法以及一种记录介质。更具体地,本公开涉及一种使得能够容易地获取大面积的人流数据的信息处理装置和方法以及一种记录介质。
背景技术:
3.无人驾驶飞行器(无人驾驶飞机)被设计成能够获取远程地区的数据。近年来,已经提出了使用无人驾驶飞行器(使用各种传感器)进行感测(专利文献1)。
4.同时,许多多功能移动电话(例如,智能手机)具有wi-fi功能,并且有时会发射无线电波来搜索接入点。当感测到无线电波时,获取指示人流的人流数据并用于服务。
5.引文列表
6.专利文献
7.专利文献1:日本专利申请公开号2015-188150
技术实现要素:
8.本发明要解决的问题
9.然而,每个终端只有无线电波感应的固定区域。因此,为了获取大面积的数据,需要安装大量的终端。此外,难以获取远程地区的数据。
10.考虑到这一点,需要使用能够获取远程地区数据的无人飞行器来获取人流数据。
11.本公开是考虑到这种情况而做出的,并且使得能够容易地获取大面积的人流数据。
12.问题的解决方案
13.根据本技术的一个方面的信息处理装置包括:设置单元,其设置测量区域;移动单元控制单元,其控制移动单元移动到由所述设置单元设置的测量区域,并测量指示人流的人流数据;接收单元,其接收由所述移动单元测量的人流数据;和显示控制单元,其控制与由所述接收单元接收的人流数据对应的显示。
14.在所述移动单元不在所述测量区域中的情况下,所述移动单元控制单元可以控制所述移动单元从当前位置移动到测量区域,并且测量人流数据。
15.所述移动单元控制单元可以控制所述移动单元在从测量区域中的当前位置盘旋的同时测量附近的人流数据。
16.所述移动单元控制单元可以控制所述移动单元转向具有最大人流的位置,并测量所述测量区域附近的人流数据。
17.在多个移动单元执行测量的情况下,所述移动单元控制单元控制所述多个移动单
元中的每一个以通过在校正运动矢量的同时进行移动来测量附近的人流数据。
18.所述显示控制单元可以控制在热图中表示与人流数据对应的人流的大小的显示。
19.当控制在热图中表示与人流数据对应的人流的大小的显示时,所述显示控制单元可以控制显示,以使先前的数据部分随经过时间而不同。
20.所述设置单元可以设置着陆区域。
21.所述移动单元控制单元可以控制所述移动单元在测量结束时或燃料不足时移动到由所述设置单元设置的着陆区域。
22.所述设置单元还可以设置着陆时存在于附近的人数,所述移动单元控制单元可以控制所述移动单元测量着陆区域中的人流数据。在测量的人流数据大于所述设置单元设置的人数的情况下,所述移动单元控制单元控制所述移动单元在盘旋时测量人流数据。在测量的人流数据小于所述设置单元设置的人数的情况下,所述移动单元控制单元控制所述移动单元着陆。
23.信息处理装置还可以包括发送单元,其发送着陆指令数据。在接收到由所述发送单元发送的着陆指令数据的情况下,所述移动单元控制单元控制所述移动单元根据着陆指令数据在着陆区域着陆。
24.根据本技术的一个方面的信息处理方法是由信息处理装置实现的信息处理方法,并且包括:设置测量区域;控制移动单元移动到由所述设置单元设置的测量区域,并测量指示人流的人流数据;接收由所述移动单元测量的人流数据;并且控制与由接收的人流数据对应的显示。
25.根据本技术的一个方面的记录在记录介质中的程序是一种程序,用于使计算机用作:设置单元,其设置测量区域;移动单元控制单元,其控制移动单元移动到由所述设置单元设置的测量区域,并测量指示人流的人流数据;接收单元,其接收由所述移动单元测量的人流数据;和显示控制单元,其控制与由所述接收单元接收的人流数据对应的显示。
26.在本技术的一个方面中,设置测量区域,并且控制移动单元移动到设置的测量区域并测量指示人流的人流数据。然后,接收由所述移动单元测量的人流数据,并且控制与由接收的人流数据对应的显示。
27.本发明的效果
28.根据本技术,可以容易地获取大面积的人流数据。
29.应当注意,本说明书中描述的有利效果仅仅是示例,并且本技术的有利效果不限于此,并且可以包括一些额外效果。
附图说明
30.图1是示出根据本技术的人流测量系统的示例配置的方框图;
31.图2是示出移动单元的控制单元的示例功能配置的方框图;
32.图3是用于说明由人流测量系统执行的人流测量过程的流程图;
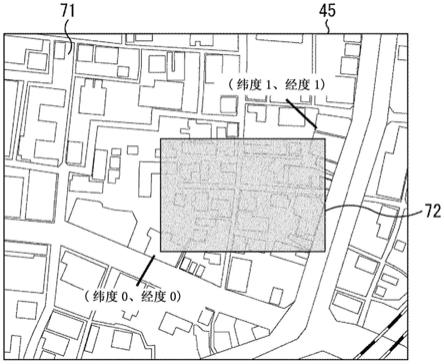
33.图4是用于说明测量条件的设置的示图;
34.图5是用于说明移动过程的示图;
35.图6是用于说明情况评估过程的流程图;
36.图7是用于说明测量过程的流程图;
37.图8是示出从测量区域中的当前位置盘旋的示例的示图;
38.图9是示出用于确定方向的矩阵的示图;
39.图10是用于说明在存在多个移动单元的情况下的测量过程的流程图;
40.图11是用于说明在存在多个移动单元的情况下的测量过程的示图;
41.图12是示出人流数据的示例的表;
42.图13是示出与人流数据对应的显示示例的示图;
43.图14是示出与人流数据对应的另一显示示例的示图;
44.图15是用于说明着陆过程的流程图;
45.图16是用于说明自动模式下的着陆过程的示图;
46.图17是示出应用本技术的个人计算机的示例配置的方框图。
具体实施方式
47.以下是用于执行本公开的模式的描述(该模式在下文中将称为“实施例”)。
48.《系统的示例配置》
49.图1是示出根据本技术的人流测量系统的示例配置的示图。许多多功能移动电话(例如,智能手机)具有wi-fi功能,偶尔会发射无线电波来搜索接入点。图1的示例中所示的人流测量系统是例如通过感测无线电波来获取表示携带多功能移动电话的人的流量的人流数据、并执行与所获取的人流数据对应的显示的系统。
50.在图1所示的示例中,人流测量系统11包括移动到测量区域并测量人流数据的移动单元21以及输入移动单元21的测量条件并控制对应于人流数据的显示的终端22。许多多功能移动电话(例如,智能手机等)具有 wi-fi功能,偶尔会发射无线电波来搜索接入点。
51.移动单元21通常是无人驾驶飞机,但是可以是任何其他结构,只要该结构是可移动的。移动单元21优选地也能够飞行,但是不必要能够飞行。移动单元21包括人流测量单元31、位置测量单元32、人流数据数据库(db)33、控制单元34、通信单元35和驱动单元36。
52.人流测量单元31通过测量多功能移动电话发射的用于搜索接入点的无线电波,来测量人流数据。测量的人流数据提供给控制单元34。
53.位置测量单元32由诸如全球定位系统(gps)等位置信息测量系统形成。位置测量单元32检测移动单元21的位置,并将指示检测结果的位置信息提供给控制单元34。人流数据db33经由控制单元34登记来自人流测量单元31的人流数据。
54.在终端22的控制下,控制单元34控制移动单元21的各个部件。即,根据经由通信单元35发送的测量条件,控制单元34促使人流测量单元31 测量人流数据,促使位置测量单元32检测移动单元21的位置,促使人流数据db33登记由人流测量单元31测量的人流数据,并且促使通信单元 35将人流数据传输到终端22。此外,根据经由通信单元35发送的测量条件(例如,测量区域信息和着陆区域信息)以及来自位置测量单元32的位置信息,控制单元34驱动该驱动单元36,以移动该移动单元21。
55.通信单元35向终端22发送人流数据,并从终端22接收测量条件,并将测量条件提供给控制单元34。在控制单元34的控制下,驱动单元36 驱动移动单元21的各个部件。
56.终端22例如由个人计算机、平板终端、移动电话等形成,并且包括人流数据数据库(db)41、控制单元42、通信单元43、输入单元44和显示单元45。
57.人流数据db 41经由控制单元42登记由移动单元21测量的人流数据。
58.如图2所示,显示单元45包括移动单元控制单元51、显示控制单元52和登记单元53。移动单元控制单元51促使通信单元43传输由用户设置并从输入单元44发送的测量条件。此外,当以手动模式执行着陆时,移动单元控制单元51促使通信单元43传输用于着陆的控制信号。显示控制单元52生成与人流数据db 41中的人流数据对应的显示数据,并将生成的显示数据输出到显示单元45。登记单元53将经由通信单元43获取的人流数据登记在人流数据db 41中。
59.通信单元43向移动单元21发送测量条件,并从移动单元21接收人流数据,并将该人流数据提供给控制单元42。输入单元(设置单元)44 响应于用户操作,设置与人流数据测量相关的测量条件。显示单元45执行与显示控制单元52生成的显示数据对应的显示。
60.现在参考图3中所示的流程图,描述由人流测量系统11执行的人流测量过程。
61.用户操作输入单元44,以输入测量条件。响应于此,输入单元44在步骤s11中设置测量条件,并将测量条件提供给移动单元控制单元51。例如,如图4所示,在显示单元45上显示地图71,测量区域72经由输入单元44由左下点(纬度0、经度0)和右上点(纬度1、经度1)限定。此外,设置燃料不足或测量完成时的着陆区域以及测量区域72。当由多个彼此协作的移动单元21执行测量时,也输入其他移动单元21等的id。移动单元控制单元51经由通信单元43向移动单元21传输所设置的测量条件。移动单元21的控制单元34经由通信单元35获取测量条件(测量区域、着陆区域、其他移动单元21的id等)。
62.注意,此后的过程是由移动单元21的控制单元34根据从移动单元控制单元51发送的测量条件或者在移动单元控制单元51的控制下执行的过程。
63.在步骤s12中,移动单元21的控制单元34执行情况评估过程。稍后将参考图6详细描述该情况评估过程。通过该过程,确定移动单元21当前处于哪种模式:移动模式、测量模式或着陆模式。
64.在步骤s13中,控制单元34确定移动单元21当前是否处于移动模式。如果在步骤s13中确定移动单元21处于移动模式,则该过程进行到步骤 s14。
65.在步骤s14中,控制单元34执行移动过程。例如,在图5所示的示例中,控制单元34促使位置测量单元32获取连接到测量区域72的当前位置81,箭头82指示显示单元45所示的地图71上的移动方向,并且控制驱动单元36将移动单元21从获取的当前位置81沿箭头82所示的移动方向移动到终端22设置的测量区域72中。此后,该过程进行到步骤s19。
66.另一方面,如果在步骤s13中确定移动单元21不处于移动模式,则该过程进行到步骤s15。在步骤s15中,控制单元34确定移动单元21当前是否处于测量模式。如果在步骤s15中确定移动单元21处于测量模式,则该过程进行到步骤s16。
67.在步骤s16中,控制单元34执行测量过程。稍后将参考图7详细描述该测量过程。通过这个过程,测量该测量区域中的人流。此后,该过程进行到步骤s19。
68.如果在步骤s15中确定移动单元21不处于测量模式,则该过程进行到步骤s17。在步骤s17中,控制单元34确定移动单元21当前是否处于着陆模式。如果在步骤s17中确定移动单元21不处于着陆模式,则该过程返回到步骤s13,并且此后重复该过程。如果在步骤s17中确定移动单元21处于着陆模式,则该过程进行到步骤s18。
69.在步骤s18中,控制单元34执行着陆过程。稍后将参考图15详细描述该着陆过程。
通过该着陆过程,移动单元21自动或手动着陆。此后,该过程进行到步骤s19。
70.在步骤s19中,控制单元34确定是否结束人流测量过程。如果确定未结束人流测量过程,则该过程返回到步骤s12,并且此后重复该过程。如果在步骤s19中确定该过程将要结束,则结束图3所示的人流测量过程。
71.现在参考图6中的流程图,描述图3中步骤s12中的情况评估过程。
72.在步骤s31中,控制单元34获取作为燃料量、测量量、当前位置等的情况数据。在步骤s32中,控制单元34确定是否存在燃料不足。如果在步骤s32中确定存在燃料不足,则该过程进行到步骤s33。在步骤s33 中,控制单元34确定测量是否已经完成。
73.如果在步骤s32中确定存在燃料不足,或者如果在步骤s33中确定测量已经完成,则该过程进行到步骤s34。在步骤s34中,控制单元34将移动单元21置于着陆模式。此后,该过程进行到步骤s38。
74.另一方面,如果在步骤s33中确定测量还没有完成,则该过程进行到步骤s35。在步骤s35中,控制单元34确定移动单元21是否在测量区域中。如果在步骤s35中确定移动单元21在测量区域中,则该过程进行到步骤s36。在步骤s36中,控制单元34将移动单元21置于测量模式。此后,该过程进行到步骤s38。
75.如果在步骤s35中确定移动单元21不在测量区域中,则该过程进行到步骤s37。在步骤s37中,控制单元34将移动单元21置于移动模式。此后,该过程进行到步骤s38。
76.在步骤s38中,控制单元34确定是否结束情况评估过程。如果在步骤s38中确定不结束情况评估过程,则该过程返回到步骤s31,并且此后重复该过程。如果在步骤s38中确定情况评估过程将结束,则结束该过程。
77.现在参考图7中的流程图,描述图3中步骤s16中的测量过程。注意,该测量过程可以在一次测量操作之后结束,或者可以重复进行,直到预定时间到来或者燃料耗尽。
78.在步骤s51中,控制单元34控制驱动单元36和人流测量单元31在从当前位置盘旋的同时在附近进行人流测量。在图8所示的示例中,示出了测量区域91的地图。例如,测量区域91被划分为具有可以由移动单元 21在一次操作中测量该尺寸的格状形式。在栅格中,已经测量的栅格单元组92根据人流被阴影化为热图。例如,栅格单元的阴影表示人流量。在该示例中,控制单元34测量每个栅格单元中的人流,同时促使移动单元 21如从当前位置93延伸的箭头94所示沿顺时针方向盘旋。
79.在步骤s52中,控制单元34确定方向。图9示出了用于确定方向的矩阵的示例。数字表示在步骤s51通过盘旋和测量已经测量的值。如图9 所示,在当前位置93处,控制单元34确定朝向具有最大人流的最暗单元的方向,除了紧接在此之前测量的单元(略微阴影的单元)之外。以这种方式,可以仅在有很多人的地方有效地执行测量。
80.在步骤s53中,控制单元34控制驱动单元36,以在步骤s52中确定的方向上移动该移动单元21。
81.在步骤s54中,控制单元34确定是否结束测量过程。如果在步骤s54 中确定不结束测量过程,则该过程返回到步骤s51,并且此后重复该过程。如果在步骤s54中确定测量过程将要结束,则结束测量过程。
82.注意,图8示出了盘旋的示例,图9示出了确定方向的方法的示例。在任一附图中,可以使用某种其他方法。
83.现在参考图10中的流程图,描述图3中的步骤s16中的测量过程的另一示例。具体地,图10所示的示例是具有多个移动单元21-1和21-2的示例情况。此外,在图11所示的测量区域91的地图中,已经由移动单元 21-1测量的栅格单元组92和已经由移动单元21-2测量的栅格单元组102 根据人流被阴影为热图。例如,栅格单元的阴影表示人流量。
84.在步骤s71中,移动单元21-1的控制单元34控制驱动单元36和人流测量单元31,以在从当前位置盘旋的同时在附近执行人流测量,例如,如上面参考图7中的步骤s51所述。
85.在步骤s72中,控制单元34经由通信单元35获取关于另一移动单元 21-2的位置信息。
86.在步骤s73中,控制单元34确定方向,例如,如上面参考图7中的步骤s52所述。图11所示的测量区域91被划分为具有可以由移动单元21 在一次操作中测量其尺寸的栅格状形式。在栅格中,已经测量的栅格单元组92根据人流被阴影化为热图。例如,栅格单元的阴影表示人流量。
87.在步骤s74中,控制单元34控制驱动单元36,以在步骤s73中确定的方向上移动该移动单元21。注意,此时,如图11所示,在移动单元21-1 的当前位置93和移动单元21-2的当前位置101之间的距离d小于预定距离d的情况下,基于移动单元21-1朝向移动单元21-2的单位方向矢量 vi,根据以下等式(1),将运动矢量m校正为m’。
88.[数学公式1]
[0089]
m’=m-vi (d-d)/d(其中,d》d))
ꢀꢀꢀ
(1)
[0090]
以这种方式,可以防止移动单元彼此靠近。
[0091]
在步骤s75中,控制单元34确定是否结束测量过程。如果在步骤s75 中确定不结束测量过程,则该过程返回到步骤s51,并且此后重复该过程。如果在步骤s75中确定测量过程将结束,则结束测量过程。
[0092]
如上所述,在具有多个移动单元的情况下,防止移动单元彼此过于靠近。以这种方式,可以避免冲突,并且不重复相同的测量。因此,可以进行有效的测量。
[0093]
图12是示出通过人流测量获得的人流数据的示例的示图。
[0094]
人流数据包含关于被划分成栅格状形式的测量区域91的每个栅格单元的人数n和测量时间t的信息。
[0095]
图13示出了根据终端22侧的人流数据在显示单元45上显示的人流显示的示例。在图13所示的示例中,在栅格中已经被测量的栅格单元组 92根据人流被阴影化为热图。例如,栅格单元的阴影表示人流量。
[0096]
图14示出了根据终端22侧的人流数据在显示单元45上显示的人流显示的另一示例。
[0097]
在图14所示的示例中,为了便于说明,栅格单元以与上述相同的方式阴影化。然而,在已经测量的实际栅格单元组92中,栅格单元组92b 的人流数据在时间上比栅格单元组92a的人流数据更老。因此,以比栅格单元组92a更高的透明度或更低的饱和度显示栅格单元组92b。此外,栅格单元组92c的人流数据在时间上比栅格单元组92b的人流数据更老。因此,以比栅格单元组92b更高的透明度或更低的饱和度显示栅格单元组 92c。
[0098]
以上述方式,可以指示数据随着从测量时间到当前时间的时间流逝逐渐偏离当前状态。
[0099]
现在参考图15中的流程图,描述图3中步骤s18中的着陆过程。
[0100]
在步骤s91中,控制单元34控制驱动单元36将移动单元21移动到终端22设置的着陆区域(充电)。
[0101]
在步骤s92中,控制单元34确定着陆是否处于自动模式。如果在步骤s92中确定着陆处于自动模式,则该过程进行到步骤s93。在步骤s93 中,控制单元34控制人流测量单元31执行人流测量。在步骤s94中,控制单元34然后检查人流测量结果,以确定人流量是否较小。
[0102]
如果在步骤s94中确定人流量较大,则该过程进行到步骤s95。在步骤s95中,控制单元34控制驱动单元36,以促使移动单元21盘旋。此后,该过程返回到步骤s93,并且此后重复该过程。
[0103]
如果在步骤s94中确定人流量较小,则该过程进行到步骤s96。在步骤s96中,控制单元34控制驱动单元36,以促使移动单元21着陆。
[0104]
另一方面,如果在步骤s92中确定着陆不处于自动模式,则该过程进行到步骤s97。在步骤s97中,控制单元34切换到手动模式。此后,在步骤s98中,控制单元34促使移动单元21以手动模式着陆。即,根据经由通信单元43和通信单元35从终端22的控制单元42发送和接收的控制信号,使移动单元21着陆。
[0105]
如上所述,在着陆区域111中,使手动模式下的移动单元21在操作者的终端22的控制下着陆。在自动模式中,当移动单元21如箭头113所示从当前位置112盘旋时,测量人流,并且使移动单元21着陆在人流较小的位置,如图16所示。
[0106]
以这种方式,可以防止移动单元撞到人或被盗。
[0107]
注意,尽管到目前为止已经描述了人流测量的示例,但是也可以测量由人携带并具有wi-fi功能的移动电话的流量或者配备有具有wi-fi功能的车载单元的车辆的流量。可以在室外测量区域中测量人流,或者可以在车站等处测量人流。
[0108]
如上所述,根据本技术,可以容易地获得大面积的人流数据。
[0109]
《个人计算机》
[0110]
上述一系列过程可以由硬件执行,或者可以由软件执行。在这系列过程由软件执行的情况下,构成软件的程序安装在计算机中。注意,计算机的示例包括并入专用硬件中的计算机和能够通过在其中安装各种程序来执行各种功能的通用个人计算机等。
[0111]
图17是示出根据程序执行上述一系列过程的个人计算机的硬件的示例配置的方框图。
[0112]
在个人计算机500中,中央处理单元(cpu)501、只读存储器(rom) 502和随机存取存储器(ram)503通过总线504彼此连接。
[0113]
输入/输出接口505进一步连接到总线504。输入单元506、输出单元 507、存储单元508、通信单元509和驱动器510连接到输入/输出接口505。
[0114]
输入单元506由键盘、鼠标、麦克风等形成。输出单元507由显示器、扬声器等形成。存储单元508由硬盘、非易失性存储器等形成。通信单元 509由网络接口等形成。驱动器510驱动可移动介质511,例如,磁盘、光盘、磁光盘或半导体存储器。
[0115]
在具有上述配置的个人计算机500中,cpu 501例如经由输入/输出接口505和总线504将存储在存储单元508中的程序加载到ram503中,并执行该程序。结果,执行上述一系列
过程。
[0116]
要由计算机(cpu 501)执行的程序可以记录在可移动介质511上,并提供该程序。可移动介质511例如是由磁盘(包括软盘)、光盘(例如,光盘只读存储器(cd-rom)或数字通用盘(dvd)、磁光盘、半导体存储器等形成的封装介质等。或者,可以经由有线或无线传输介质提供该程序,例如,局域网、互联网或数字卫星广播。
[0117]
在计算机中,当可移动介质511安装在驱动器510上时,程序可以经由输入/输出接口505安装到存储单元508中。或者,该程序可以由通信单元509通过有线或无线传输介质接收,并安装到存储单元508中。此外,该程序可以预先安装到rom 502或存储单元508中。
[0118]
注意,要由计算机执行的程序可以是用于根据本说明书中描述的顺序按时间顺序执行过程的程序,或者可以是用于并行执行过程或在必要时 (例如,当具有调用时)执行过程的程序。
[0119]
此外,在本说明书中,描述记录在记录介质上的程序的步骤包括并行或相互独立地执行(如果不是必须按时间顺序执行)的过程以及根据本文中描述的顺序按时间顺序执行的过程。
[0120]
此外,在本说明书中,系统是指包括一个以上装置的整个设备。
[0121]
注意,本公开的实施例不限于上述实施例,并且在不脱离本公开的范围的情况下,可以对其进行各种修改。
[0122]
例如,本公开可以体现在云计算配置中,其中,经由网络在多个装置之间共享一个功能,并且由彼此协作的装置执行过程。
[0123]
此外,上面作为一个装置(或处理单元)描述的任何配置可以划分成多个装置(或处理单元)。相反,上面作为多个装置(或处理单元)描述的任何配置可以组合成一个装置(或处理单元)。此外,当然可以将除上述部件之外的部件添加到任何装置(或处理单元)的配置中。此外,只要整个系统的配置和功能保持基本相同,装置(或处理单元)的一些部件可以包含到另一装置(或处理单元)的配置中。即,本技术不限于上述实施例,但是在不脱离本技术的范围的情况下,可以对其进行各种修改。
[0124]
虽然上面已经参考附图描述了本公开的优选实施例,但是本公开不限于这些示例。显然,本领域的普通技术人员可以在本文中要求保护的技术精神的范围内进行各种改变或修改,并且应该理解,这些改变或修改在本公开的技术范围内。
[0125]
注意,也可以在下面描述的配置中体现本技术。
[0126]
(1)一种信息处理装置,包括:
[0127]
设置单元,其设置测量区域;
[0128]
移动单元控制单元,其控制移动单元移动到由所述设置单元设置的测量区域,并测量指示人流的人流数据;
[0129]
接收单元,其接收由所述移动单元测量的人流数据;和
[0130]
显示控制单元,其控制与由所述接收单元接收的人流数据对应的显示。
[0131]
(2)根据(1)所述的信息处理装置,其中,当所述移动单元不在所述测量区域中时,所述移动单元控制单元控制所述移动单元从当前位置移动到测量区域,并且测量人流数据。
[0132]
(3)根据(1)或(2)所述的信息处理装置,其中,所述移动单元控制单元控制所述移
动单元在从测量区域中的当前位置盘旋的同时测量附近的人流数据。
[0133]
(4)根据(1)至(3)中任一项所述的信息处理装置,其中,所述移动单元控制单元控制所述移动单元转向具有最大人流的位置,并测量所述测量区域附近的人流数据。
[0134]
(5)根据(1)至(4)中任一项所述的信息处理装置,其中,当多个移动单元执行测量时,所述移动单元控制单元控制所述多个移动单元中的每一个以通过在校正运动矢量的同时进行移动来测量附近的人流数据。
[0135]
(6)根据(1)至(5)中任一项所述的信息处理装置,其中,所述显示控制单元控制在热图中表示与人流数据对应的人流的大小的显示。
[0136]
(7)根据(6)所述的信息处理装置,其中,当控制在热图中表示与人流数据对应的人流的大小的显示时,所述显示控制单元控制显示,以使先前的数据部分随经过时间而不同。
[0137]
(8)根据(1)至(7)中任一项所述的信息处理装置,其中,所述设置单元设置着陆区域。
[0138]
(9)根据(8)所述的信息处理装置,其中,所述移动单元控制单元控制所述移动单元在测量结束时或燃料不足时移动到由所述设置单元设置的着陆区域。
[0139]
(10)根据(9)所述的信息处理装置,其中,
[0140]
所述设置单元还设置着陆时存在于附近的人数,所述移动单元控制单元控制所述移动单元测量着陆区域中的人流数据,当测量的人流数据大于所述设置单元设置的人数时,所述移动单元控制单元控制所述移动单元在盘旋时测量人流数据,并且当测量的人流数据小于所述设置单元设置的人数时,所述移动单元控制单元控制所述移动单元着陆。
[0141]
(11)根据(9)所述的信息处理装置,还包括:
[0142]
发送单元,其发送着陆指令数据,
[0143]
其中,当接收到由所述发送单元发送的着陆指令数据时,所述移动单元控制单元控制所述移动单元根据着陆指令数据在着陆区域着陆。
[0144]
(12)一种由信息处理装置实现的信息处理方法,
[0145]
所述信息处理方法包括:
[0146]
设置测量区域;
[0147]
控制移动单元移动到由所述设置单元设置的测量区域,并测量指示人流的人流数据;
[0148]
接收由所述移动单元测量的人流数据;并且
[0149]
控制与由接收的人流数据对应的显示。
[0150]
(13)一种存储程序的记录介质,用于使计算机用作:
[0151]
设置单元,其设置测量区域;
[0152]
移动单元控制单元,其控制移动单元移动到由所述设置单元设置的测量区域,并测量指示人流的人流数据;
[0153]
接收单元,其接收由所述移动单元测量的人流数据;以及
[0154]
显示控制单元,其控制与由所述接收单元接收的人流数据对应的显示。
[0155]
附图标记列表
[0156]
11 人流测量系统
[0157]
21、21-1、21-2 移动单元
[0158]
22 终端
[0159]
31 人流测量单元
[0160]
32 位置测量单元
[0161]
33 人流数据db
[0162]
34 控制单元
[0163]
35 通信单元
[0164]
36 驱动单元
[0165]
41 人流数据db
[0166]
42 控制单元
[0167]
43 通信单元
[0168]
44 输入单元
[0169]
45 显示单元
[0170]
51 移动单元控制单元
[0171]
52 显示控制单元
[0172]
53 登记单元
[0173]
91 测量区域
[0174]
92和92a至92 栅格单元组
[0175]
93 当前位置
[0176]
94 箭头
[0177]
101 当前位置
[0178]
102 栅格单元组
[0179]
111 着陆区域
[0180]
112 当前位置
[0181]
113 箭头。