1.本实用新型涉及一种无人机技术领域,特别是关于一种无人机减震防侧翻脚架。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更灵活。适合用于教学、航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域,大大的拓展了无人机本身的用途。对于专业的航拍飞行器来说,价格较高,一般的无人机搭载的拍摄设备价格较为昂贵,内部精密电子元件较多,在降落时操作不慎引发的剧烈震动会损坏拍摄设备以及无人机本身的结构。市场上大多的减震架的支脚处都有很大的棱角。在实际工作中,无人机的降落地大多为凹凸不平的水泥地和砂石地。如果无人机在降落时有水平的初速度,在很大的可能上支脚的棱角会卡在地面的凹凸处造成侧翻。但是目前的无人机脚架大多只起到减震的功能,这就需要飞手在控制无人机降落的时候要控制好无人机的水平速度。一旦发生一些导致无人机在降落时水平速度过快的意外,就会无人机侧翻,轻则毁坏桨叶,重则失控乱飞。
技术实现要素:
3.针对上述问题,本实用新型的目的是提供一种无人机减震防侧翻脚架,其利用弹簧的延伸性协助无人机有效解决降落或者起飞时容易造成的侧翻问题,同时也能使无人机降落时更加稳定。
4.为实现上述目的,本实用新型采取以下技术方案:一种无人机减震防侧翻脚架,其包括脚架本体,所述脚架本体的第一端上设置有脚架安装板,所述脚架安装板的上部与无人机底座连接;所述脚架安装板与所述脚架本体的第一端之间设置有减震结构;所述脚架本体的第二端设置有滚动机构,通过该滚动机构将所述脚架本体在地面上滚动;所述脚架本体的第二端端部末端采用向上翘起的结构。
5.进一步,所述脚架本体采用近似s型结构,其第一端和第二端均为平滑的曲线体。
6.进一步,所述脚架本体的第二端端部的弧度大于第一端端部的弧度。
7.进一步,所述脚架安装板的下部两侧对称设置有侧板;每个所述侧板的一端与所述脚架安装板的中部连接,所述侧板的另一端与所述脚架本体的第一端连接。
8.进一步,每个所述侧板的另一端端部都设置有第一销孔,每个所述侧板通过该第一销孔经第一销轴与所述脚架本体连接。
9.进一步,所述脚架安装板的下部两端分别设置有左沉头座和右沉头座;所述脚架本体的第一端上部也对应设置有左沉头座和右沉头座;所述右沉头座内都设置有第二销孔,所述第二销孔内都设置由第二销轴;所述减震结构通过所述左沉头座、右沉头座和第二销轴设置在所述脚架安装板与所述脚架本体之间。
10.进一步,所述减震结构包括承压弹簧和拉伸弹簧;所述承压弹簧的两端分别嵌设在所述脚架安装板和脚架本体的所述左沉头座内,所述拉伸弹簧的两端分别挂设在所述脚架安装板和脚架本体的所述右沉头座内第二销轴上。
11.进一步,所述脚架本体的第二端设置有一个以上的滚珠凹槽,用于容置安装所述滚动机构。
12.进一步,所述滚动机构由若干滚珠构成;所述滚珠安装在所述滚珠凹槽内。
13.进一步,所述脚架安装板的顶部设置有两个通孔,螺栓通过该通孔将所述脚架安装板安装在所述无人机底座上。
14.本实用新型由于采取以上技术方案,其具有以下优点:1、本实用新型采用弹簧对无人机进行减震,相对于传统的利用脚架自身弹性的减震方式,利用弹簧减震更加有效。2、本实用新型将脚架尾部翘起一个角度,并在接触地面的脚架部分加上滚珠,可以防止无人机的脚架被凹凸不平的地面卡住造成无人机侧翻。3、本实用新型可以很好地和无人机飞控的姿态控制结合,实现无人机的自稳。
附图说明
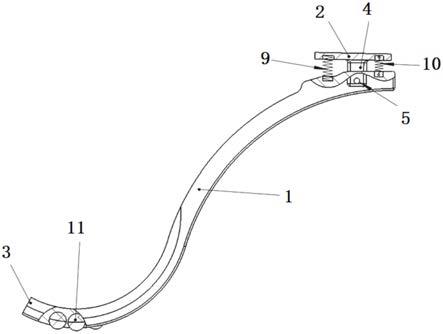
15.图1是本实用新型的整体结构示意图;
16.图2是本实用新型脚架本体的第一端结构示意图。
具体实施方式
17.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例的附图,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
18.在本实用新型的描述中,需要理解的是,术语“上”、“下”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
19.如图1、图2所示,本实用新型提供一种无人机减震防侧翻脚架,其包括脚架本体1,脚架本体1的第一端上设置有脚架安装板2,脚架安装板2的上部与无人机底座连接;并在脚架安装板2与脚架本体1的第一端之间设置有减震结构。脚架本体1的第二端设置有滚动机构,通过该滚动机构可以实现将脚架本体1在地面上滚动;脚架本体1的第二端端部末端3采用向上翘起的结构,避免与地面接触。
20.上述实施例中,脚架本体1采用近似s型结构,其第一端和第二端均为平滑的曲线体,且第二端端部的弧度大于第一端端部的弧度,进而使得第二端端部末端3向上翘起。
21.上述实施例中,脚架安装板2的下部两侧对称设置有侧板4。每个侧板4的一端与脚架安装板2的中部连接,侧板4的另一端与脚架本体1的第一端连接。
22.其中,在每个侧板4的另一端端部都设置有第一销孔5,每个侧板4通过该第一销孔5经第一销轴与脚架本体1连接,第一销孔5与第一销轴为间隙配合,使得脚架安装板2与脚架本体1可以绕第一销轴转动。
23.上述实施例中,脚架安装板2的下部两端分别设置有左沉头座6和右沉头座7;脚架本体1的第一端上部也对应设置有左沉头座6和右沉头座7。右沉头座7内都设置有第二销孔8,第二销孔8内都设置由第二销轴。减震结构通过左沉头座6、右沉头座7和第二销轴设置在脚架安装板2与脚架本体1之间。
24.上述实施例中,减震结构包括承压弹簧9和拉伸弹簧10。承压弹簧9的两端分别嵌设在脚架安装板2和脚架本体1的左沉头座6内,拉伸弹簧10的两端分别挂设在脚架安装板2和脚架本体1的右沉头座7内第二销轴上。
25.上述实施例中,脚架安装板2的顶部设置有两个通孔,螺栓通过该通孔将脚架安装板2安装在无人机底座上。
26.上述实施例中,脚架本体1的第二端设置有一个以上的滚珠凹槽,用于容置安装滚动机构。其中,滚动机构由若干滚珠11构成;滚珠11安装在滚珠凹槽内。优选的,在本实施例中,滚珠凹槽优选设置为三个。
27.综上,本发明在使用时,如图1所示,脚架安装板2与脚架本体1通过第一销孔5由第一销轴连接在一起,脚架安装板2与脚架本体1可以绕第一销轴转动。当加上载荷时,脚架本体1绕第一销轴顺时针旋转,承压弹簧9压缩产生压弹力,拉伸弹簧10产生拉弹力,在承压弹簧9和拉伸弹簧10的综合作用下产生反向扭矩抵抗脚架顺时针转动,从而支撑无人机。相对于现有技术中只靠脚架本身弹性来减震的无人机脚架,本实用新型使用承压弹簧9和拉伸弹簧10两个减震弹簧,很大的程度上减轻了震动。同时为了让缓冲的效果更好,特地将卡住承压弹簧9 的两个沉头座的距离加大,使承压弹簧9有更大的压缩空间。
28.当无人机在降落时有较大的水平初速度撞击到地面上时,承压弹簧9和拉伸弹簧10变形,缓冲冲击力,滚珠11可以在地面上滚动,有更大的缓冲距离。并且由于脚架本体1的第二端端部末端3为翘起部,脚架本体1的第二端端部末端3 不会因为地面凹凸不平卡住,又由于抵抗缓冲时脚架会逆时针转动一个角度,末端翘起的角度会更大,进一步防止末端卡住地面。无人机在完全停止转动之前,飞控的姿态控制并不不会停止,也就是说,在脚架接触到地面后转动时,飞控仍然在控制无人机的姿态,这样,脚架转动幅度大的一侧引起的无人机的整体倾斜也会在飞控的姿态控制中慢慢转回水平位置,使无人机整体稳定下来。
29.上述各实施例仅用于说明本实用新型,各部件的结构、尺寸、设置位置及形状都是可以有所变化的,在本实用新型技术方案的基础上,凡根据本实用新型原理对个别部件进行的改进和等同变换,均不应排除在本实用新型的保护范围之外。