1.本发明属于直升机技术领域,涉及一种告警方法和装置,特别是涉及一种预防直升机尾部着地的告警方法和装置。
背景技术:
2.单旋翼直升机,为了平衡旋翼桨叶转动产生的扭矩,均设置有尾梁、尾桨和尾传动系统。为了提高直升机的装载空间和载重量,旋翼桨叶和尾桨叶的几何长度都会很长,因此直升机的尾部结构长度也很长。目前,大部分大、中型直升机都是采用前三点轮式起落架,为了着陆(降落)安全和平稳,必须要先使后面的两机轮(主机轮)着地,再让前机轮着地,因此飞行员在操纵直升机着陆(降落)过程中均会习惯性使直升机保持上仰状态。但是,当直升机处于上仰状态进行着陆(降落)或贴地飞行时,稍有不慎又可能发生尾部着地问题。
3.为此,大多数直升机在尾梁后端安装了尾撑,可以使直升机在非正常着陆尾部下沉情况下,保护尾桨和尾传动系统。但是,当直升机下降速度和(或)上仰角度过大导致着陆过猛,超出了尾撑缓冲器的最大行程,撞击力仍会通过尾撑作用到直升机尾梁,并通过尾梁作用到中机身尾上舱结构(中机身与尾梁的过渡部分),导致尾上舱结构变形,并可能造成尾传动系统工作异常,使直升机无法继续安全飞行。
4.现有技术中,飞行员只能按照飞行手册和经验操纵直升机着陆(降落)和贴地飞行,但是,对于新飞行员,或飞行着陆(降落)速度过快、气象条件比较复杂等情况下,稍有大意,就容易使直升机发生尾部着地的问题,当着地过猛则会致使直升机的中机身尾上舱结构变形,并可能造成尾传动系统工作异常,使直升机无法继续安全飞行。
5.因此,为了解决这个问题,本发明提出了一种预防直升机尾部着地的告警方法和装置。
技术实现要素:
6.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种预防直升机尾部着地的告警方法和装置,用于解决现有技术中直升机易发生尾部着地从而造成直升机中机身尾上舱结构变形的技术问题。
7.为实现上述目的及其他相关目的,本发明提供一种预防直升机尾部着地的告警方法,包括以下步骤:
8.步骤一:计算直升机可致使尾部着地的预警数据,所述预警数据包括预警高度h1、预警下降速度v1及预警俯仰角θ1;
9.步骤二:获取直升机着陆时的实时着陆数据,所述实时着陆数据包括直升机的高度信号h、下降速度信号v及俯仰角信号θ;
10.步骤三:比较预警数据和实时着陆数据,当h≤h1且v≥v1时或h≤h1且θ≥θ1时,判定直升机存在尾部着地风险,给出告警信号;
11.步骤四:循环监测、比较、告警,直至直升机脱离尾部着地风险状态时,停止告警。
12.上述任一方案中优选的是,所述预警高度h1为直升机进入预防尾部着地告警高度范围的临界高度,h1=(1.5~2)l,其中,l为直升机的旋翼桨叶长度值。
13.上述任一方案中优选的是,所述预警下降速度v1为直升机着陆时可能导致尾部着地的临界下降速度,v1=v0,其中,v0为直升机着陆时可能导致尾部着地的临界下降速度v0,所述v0由直升机飞行手册规定。
14.上述任一方案中优选的是,所述预警俯仰角θ1为直升机着陆时,致使尾部着地的临界俯仰角,θ1=θ0,其中,θ0为根据直升机的结构和几何外形,计算出的直升机着陆接地时,可致使尾部着地的临界俯仰角。
15.一种预防直升机尾部着地的告警装置,包括:
16.设置模块,用于设置直升机可致使尾部着地的预警数据,所述预警数据包括预警高度h1、预警下降速度v1及预警俯仰角θ1;
17.获取模块,用于获取直升机着陆时的实时着陆数据,所述实时着陆数据包括高度信号h、下降速度信号v及俯仰角信号θ;
18.预警模块,用于比较预警数据和实时着陆数据,当h≤h1且v≥v1时或h≤h1且θ≥θ1时,判定直升机存在尾部着地风险,给出告警信号;
19.电源电路,用于对直升机输入的直流电源进行滤波和隔离,并变换为告警装置内各电路工作所需的电源。
20.上述任一方案中优选的是,所述设置模块包括依次连接数据处理单元和h1、v1、θ1参数储存器。
21.上述任一方案中优选的是,所述获取模块包括依次连接的调理电路单元、信号采集及转换单元和接口电路单元。
22.上述任一方案中优选的是,所述预警模块包括依次连接的数据处理单元、信号放大单元和告警、报故转换输出单元。
23.上述任一方案中优选的是,所述调理电路单元包括调理电路1、调理电路2及调理电路3,所述信号采集及转换单元包括a/d变换电路、数据总线接口及s/d变换电路,所述接口电路单元包括接口电路1、接口电路2及接口电路3,所述调理电路1、a/d变换电路及接口电路1依次连接,所述调理电路2、数据总线接口及接口电路2依次连接,所述调理电路3、s/d变换电路及接口电路3依次连接,所述接口电路1、接口电路2及接口电路3分别与数据处理单元连接。
24.上述任一方案中优选的是,所述信号放大单元包括三极管t1和三极管t2,所述告警、报故转换输出单元包括继电器k1和继电器k2,所述三极管t1和三极管t2分别与数理处理单元连接,所述继电器k1和继电器k2分别与三极管t1和三极管t2连接。
25.如上所述,本发明的一种预防直升机尾部着地的告警方法和装置,具有以下有益效果:本发明通过实时监测直升机配装的无线电高度表输出的高度信号h、组合导航系统输出的下降速度信号v和地平仪或组合导航系统输出的俯仰角信号θ,结合所配装直升机的结构和几何外形计算出预警高度h1、预警下降速度v1及预警俯仰角θ1,并将h、v、θ和h1、v1、θ1分别进行比较,当h≤h1且v≥v1时或h≤h1且θ≥θ1时,直升机存在尾部着地风险,立即给出告警信号,直至飞行员操纵直升机脱离尾部着地风险状态时,方才停止告警,从而能够有效预防直升机尾部着地问题的发生,提高直升机飞行的安全性。
附图说明
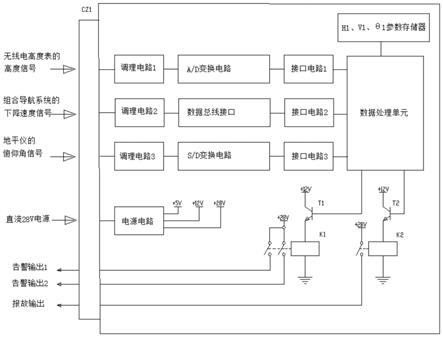
26.图1显示为告警装置的原理框图。
27.图2显示为告警装置的工作流程图。
具体实施方式
28.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
29.实施例1
30.一种预防直升机尾部着地的告警方法,包括以下步骤:
31.步骤一:计算直升机可致使尾部着地的预警数据,所述预警数据包括预警高度h1、预警下降速度v1及预警俯仰角θ1;其中,
32.预警高度h1:为直升机进入预防尾部着地告警高度范围的临界高度,按照告警装置需配装型号直升机的旋翼桨叶的长度l确定,即h1=1.8l;但h1不限于为1.8l,h1在(1.5~2)l范围内均可,可根据实际情况进行相应的选择。
33.预警下降速度v1:为直升机着陆时可能导致尾部着地的临界下降速度,参照告警装置需配装型号直升机飞行手册的规定确定,即v1=v0,其中,v0为直升机着陆时可能导致尾部着地的临界下降速度v0,所述v0由直升机飞行手册规定,确定预警下降速度v1的过程中,直接翻阅告警装置配装型号的直升机飞行手册即可。
34.预警俯仰角θ1:为直升机着陆时,致使尾部着地的临界俯仰角,根据告警装置需配装型号直升机的结构和几何外形确定,即θ1=θ0,其中,θ0为根据直升机的结构和几何外形,计算出的直升机着陆接地时,可致使尾部着地的临界俯仰角,具体以直升机主机轮为着地支撑点,当尾撑端部也着地时对应的机身仰角,其具体计算方法为现有技术,本领域技术人员根据自身知识和现有技术可知,故本实施例中不再对θ0的具体计算方法做进一步的赘述。
35.步骤二:获取直升机着陆时的实时着陆数据,所述实时着陆数据包括直升机的高度信号h、下降速度信号v及俯仰角信号θ;
36.具体为:由预警装置实时监测直升机配装的无线电高度表输出的高度信号h、组合导航系统输出的下降速度信号v和地平仪或组合导航系统输出的俯仰角信号θ。
37.按照无线电高度表输出的高度信号h、组合导航系统输出的下降速度信号v和地平仪或组合导航系统输出的俯仰角信号θ,分别设置对应的信号调理、采集和缓存电路。
38.当直升机已经配装有采集显示无线电高度表输出的高度信号h、组合导航系统输出的下降速度信号v和地平仪或组合导航系统输出的俯仰角信号θ等参数的综合显示系统时,可直接利用综合显示系统的相关资源。
39.步骤三:比较预警数据和实时着陆数据,当h≤h1且v≥v1时或h≤h1且θ≥θ1时,判定直升机存在尾部着地风险,给出告警信号;
40.具体为:将实时监测的无线电高度表输出的高度信号h、组合导航系统输出的下降速度信号v和地平仪或组合导航系统输出的俯仰角信号θ,分别与预警高度h1、预警下降速度v1和预警俯仰角θ1进行比较。
41.具体的比较判断方法为:采集比较h与h1的大小,当h>h1时,再次循环采集比较h
与h1的大小;当h≤h1时,执行采集比较v与v1的大小,若v≥v1时判定直升机存在尾部着地风险并立即给出告警信号1s,然后返回至执行采集比较h与h1的大小;若v<v1时,执行采集比较θ与θ1的大小,当θ≥θ1时判定直升机存在尾部着地风险并立即给出告警信号1s,然后返回至执行采集比较h与h1的大小;当θ<θ1时返回至执行采集比较h与h1的大小,如此循环。
42.即当h≤h1且v≥v1时或h≤h1且θ≥θ1时判定直升机存在尾部着地风险,立即给出告警信号1s。该告警信号根据所配装型号直升机的需要,可以是直流电压信号、高电平信号、接地信号、低电平信号、语音信号或总线数据信号等。
43.步骤四:循环监测、比较、告警,直至直升机脱离尾部着地风险状态时,停止告警。
44.综上,通过此告警方法可以在直升机着陆或贴地飞行的过程中对直升机的飞行状态进行判断,从而判断直升机是否存在尾部着地的风险,当直升机存在尾部着地风险时,及时给出告警,提醒驾驶员,便于驾驶员进行相应的操作,从而避免直升机在着陆或贴地飞行的过程中发生尾部着地,整个过程不受飞行员熟练程度、飞行速度及气象条件等的影响,可有效保证直升机的安全飞行,提高直升机着陆或贴地飞行过程中的安全性。
45.实施例2
46.请参阅图1-2,本发明提供一种预防直升机尾部着地的告警装置,包括:
47.设置模块,用于设置直升机可致使尾部着地的预警数据,所述预警数据包括预警高度h1、预警下降速度v1及预警俯仰角θ1;
48.获取模块,用于获取直升机着陆时的实时着陆数据,所述实时着陆数据包括高度信号h、下降速度信号v及俯仰角信号θ;
49.预警模块,用于比较预警数据和实时着陆数据,当h≤h1且v≥v1时或h≤h1且θ≥θ1时,判定直升机存在尾部着地风险,给出告警信号;
50.电源电路,用于对直升机输入的直流电源进行滤波和隔离,并变换为告警装置内各电路工作所需的电源。
51.本实施例使用时,告警装置包括插座cz1、电源电路、设置模块、获取模块及预警模块。
52.插座cz1用于为信号和电源提供集中的电气接口。
53.电源电路用于对直升机上输入的直流28v电源进行滤波和隔离,并变换为告警装置内各电路工作所需的+5v、+12v和+28v电源。即直升机上直流28v电源经插座cz1转接后进入电源电路,进行滤波和隔离,并变换为+5v、+12v和+28v电源,分别供给告警装置内各需要的电路。
54.设置模块用于设置预警高度h1、预警下降速度v1及预警俯仰角θ1,即按配装型号直升机的飞行手册和结构相关参数计算出预警高度h1、预警下降速度v1及预警俯仰角θ1,并通过设置模块设置预警高度h1、预警下降速度v1及预警俯仰角θ1参数。
55.获取模块用于获取直升机着陆时的实时着陆数据,即转接入直升机上无线电高度表输出的高度信号h、组合导航系统输出的下降速度信号v及地平仪或组合导航系统输出的俯仰角信号θ。
56.预警模块用于比较预警数据和实时着陆数据,并根据比较结果输出控制告警信号,告警信号经功率放大后经过插座cz1转接,输出告警或报故信号。
57.作为上述实施例的进一步描述,所述设置模块包括依次连接数据处理单元和h1、v1、θ1参数储存器。
58.本实施例使用时,所述告警装置设有设置按钮和显示屏,根据告警装置需配装型号直升机的旋翼桨叶长度值l、飞行手册的规定及直升机的结构和几何外形,分别根据公式:h1=(1.5~2)l、v1=v0及θ1=θ0计算出预警高度h1、预警下降速度v1及预警俯仰角θ1,并通过告警装置上的设置按钮在告警装置上设置预警高度h1、预警下降速度v1及预警俯仰角θ1。
59.h1、v1、θ1参数存储器用于存储预警高度h1、预警下降速度v1和预警俯仰角θ1参数,告警装置上电初始化并通过自检后,h1、v1、θ1参数存储器将存储的h1、v1、θ1参数提供给预警模块中的数据处理单元进行读取处理。
60.作为上述实施例的进一步描述,所述获取模块包括依次连接的调理电路单元、信号采集及转换单元和接口电路单元。
61.本实施例使用时,调理电路单元用于隔离、适配直升机输出的相应高度信号、下降速度信号及俯仰角信号,并变换为信号采集及转换单元可用的信号。
62.本实施例中,调理电路单元包括调理电路1、调理电路2及调理电路3。其中,
63.调理电路1用于隔离、适配无线电高度表输出的高度信号,并变换为a/d变换电路可处理的可用信号;
64.调理电路2用于隔离、适配组合导航系统输出的下降速度信号,并变换为数据总线接口电路可处理的可用信号;
65.调理电路3用于隔离、适配地平仪输出的俯仰角信号,并变换为s/d变换电路可处理的可用信号。
66.本实施例中,信号采集及转换单元用于对相应的高度信号、下降速度信号及俯仰角信号进行采集,并转换为对应的数字信号。
67.信号采集及转换单元包括a/d变换电路、数据总线接口及s/d变换电路。其中,
68.a/d变换电路用于将调理后的高度信号进行采集,并转换为对应的数字信号;
69.数据总线接口用于将调理后的下降速度总线信号进行采集,并转换为对应的数字信号;
70.s/d变换电路用于将调理后的俯仰角信号进行采集,并转换为对应的数字信号。
71.本实施例中,接口电路单元用于缓存相应的高度信号h、下降速度信号v及俯仰角信号θ。
72.接口电路单元包括接口电路1、接口电路2及接口电路3。其中,
73.接口电路1用于缓存高度数字信号;
74.接口电路2用于缓存下降速度数字信号;
75.接口电路3用于缓存俯仰角数字信号。
76.本实施例中,调理电路1、a/d变换电路及接口电路1依次连接,形成无线电高度表的高度信号h实时采集线路。
77.所述调理电路2、数据总线接口及接口电路2依次连接,形成组合导航系统的下降速度信号v实时采集线路。
78.所述调理电路3、s/d变换电路及接口电路3依次连接,形成地平仪或组合导航系统
的俯仰角信号θ实时采集线路。
79.所述接口电路1、接口电路2及接口电路3分别与数据处理单元连接,经过处理形成数字信号的高度信号h、下降速度信号v及俯仰角信号θ通过数据处理单元的调取后与h1、v1、θ1参数储存器中存储的预警高度h1、预警下降速度v1及预警俯仰角θ1进行比较,并根据比较结果控制告警。
80.综上,无线电高度表输出的高度信号h经插座cz1转接后进入调理电路1,进行信号隔离、适配、变换后进入a/d变换电路,经采集转换为高度数字信号后,进入接口电路1进行缓存,等待数据处理单元进行读取处理。
81.组合导航系统输出的下降速度信号v经插座cz1转接后进入调理电路2,进行信号隔离、适配、变换后进入总线接口,经采集转换为下降速度数字信号后,进入接口电路2进行缓存,等待数据处理单元进行读取处理。
82.地平仪或组合导航系统输出的俯仰角信号θ经插座cz1转接后进入调理电路3,进行信号隔离、适配、变换后进入s/d变换电路,经采集转换为俯仰角数字信号后,进入接口电路3进行缓存,等待数据处理单元进行读取处理。
83.作为上述实施例的进一步描述,所述预警模块包括依次连接的数据处理单元、信号放大单元和告警、报故转换输出单元。
84.其中,数据处理单元用于按软件工作流程,进行告警装置的上电初始化、自检,根据自检结果控制报故,接收采集模块采集并处理的高度信号h、下降速度信号v及俯仰角信号θ和h1、v1、θ1参数储存器中存储的预警高度h1、预警下降速度v1及预警俯仰角θ1,并比较h与h1、v与v1、θ与θ1的大小,根据自检结果和比较结果控制告警。
85.本实施例中,信号放大单元用于对数据处理单元输出的控制告警或报故信号进行功率放大。
86.信号放大单元包括三极管t1和三极管t2。
87.其中,三极管t1用于对数据处理单元输出的控制告警信号进行功率放大;
88.三极管t2用于对数据处理单元输出的控制报故信号进行功率放大。
89.本实施例中,告警、报故转换输出单元用于将控制告警或报故信号转换为直流28v报警或报故信号输出。
90.告警、报故转换输出单元包括继电器k1和继电器k2。其中,
91.继电器k1用于将控制告警信号转换为直流28v告警输出1和直流28v告警输出2;
92.继电器k2用于将控制报故信号转换为直流28v报故输出。
93.所述三极管t1和三极管t2分别与数理处理单元连接,所述继电器k1和继电器k2分别与三极管t1和三极管t2连接。
94.数据处理单元输出的控制告警信号经三极管t1进行功率放大后,控制继电器k1工作,经插座cz1转接后,输出直流28v告警输出1和直流28v告警输出2。
95.数据处理单元输出的控制报故信号经三极管t2进行功率放大后,控制继电器k2工作,经插座cz1转接后,输出直流28v报故输出。
96.告警装置的工作方法如下:
97.s1:接通电源,告警装置进行系统上电初始化;
98.s2:告警装置进行系统自检,当检查接口电路1、接口电路2、接口电路3、数据处理
单元及h1、v1、θ1参数存储器均工作正常时,自检合格,当任一电路工作异常时自检不合格,当自检合格时,执行s3,当自检不合格时,执行s11;
99.s3:输出告警信号2s,用于提示告警装置工作正常;
100.s4:采集接口电路1缓存的无线电高度信号h;
101.s5:判断是否h≤h1,若h≤h1,执行s6,若h>h1,重新执行s4,其中,h1为h1、v1、θ1参数存储器中存储的预警高度;
102.s6:采集接口电路2缓存的下降速度信号v;
103.s7:判断是否v≥v1,若v≥v1,执行s10,若v<v1,执行s8,其中,v1为h1、v1、θ1参数存储器中存储的预警下降速度;
104.s8:采集接口电路3缓存的俯仰角信号θ;
105.s9:判断是否θ≥θ1,若θ≥θ1,执行s10,若θ<θ1,重新执行s5,其中θ1为h1、v1、θ1参数存储器中存储的预警俯仰角;
106.s10:输出直升机尾部着地告警信号1s,然后执行s12;
107.s11:报故;
108.s12:返回执行s4。
109.当需要配装本告警装置时,应按该配装型号直升机的飞行手册和结构相关参数设置预警高度h1、预警下降速度v1和预警俯仰角θ1参数;转接入机上无线电高度表输出的高度信号h、组合导航系统输出的下降速度信号v和地平仪或组合导航系统输出的俯仰角信号θ;接入机上直流28v电源,并接出告警装置输出的告警信号和报故信号。
110.当直升机已经配装有采集显示无线电高度表输出的高度h、组合导航系统输出的下降速度v和地平仪或组合导航系统输出的俯仰角θ等参数,并具备能输出告警信号接口的综合显示系统时,可直接利用综合显示系统的相关资源,仅需按照本告警方法增加告警功能软件即可实现相应的预防直升机尾部着地的告警功能。
111.综上所述,本发明可以在直升机存在尾部着地风险时,立即给出告警信号,直至飞行员操纵直升机脱离尾部着地风险状态时,方才停止告警,从而有效预防直升机尾部着地问题的发生,提高直升机飞行的安全性。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
112.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。