1.本实用新型涉及仿生扑翼飞行器技术领域,尤其是涉及一种仿鸽类扑翼飞行器。
背景技术:
2.德国festo研制的smartbird重450g,翼展2m,飞行速度7m/s,续航时间20min,两段翼扑翼飞行。但是由于是两段翼布局,尺寸较大,飞行速度较低,无法快速突防开展侦察工作。
3.美国aero vironment公司研发的“蜂鸟”(nano hummingbird),由darpa资助,耗资400万美元,历时5年时间研制完成。其重量19g,翼展16.5cm,前飞速度6.7m/s,续航能力为4min。目前“蜂鸟”已可装配军队,执行小区域以及室内的侦察任务。但是由于“蜂鸟”尺寸较小,飞行速度较低,有效载荷能力较差,无法执行多种侦察任务。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型的一个目的在于提出一种仿鸽类扑翼飞行器,能够高速飞行,能够携带较多的有效载荷,扑翼尺寸较小。
5.根据本实用新型实施例的仿鸽类扑翼飞行器,包括:
6.机身壳体;
7.机身骨架,所述机身骨架设置在所述机身壳体内;
8.扑翼,所述扑翼有两个,两个所述扑翼对称地分布在所述机身壳体的左右两侧,每一所述扑翼采用单段翼复合型翼面布局;
9.驱动组件,所述驱动组件安装在所述机身骨架上,所述驱动组件驱动所述扑翼进行上下扑动运动和翼剖面的被动扭转运动,以模仿大自然中鸽类的扑翼运动,来提升所述仿鸽类扑翼飞行器的升力和推力;
10.v型尾翼,所述v型尾翼与所述机身骨架的尾部固定且位于所述机身壳体外,用于在所述仿鸽类扑翼飞行器飞行过程中进行姿态控制、姿态平衡、方向控制和提供部分升力。
11.根据本实用新型实施例的仿鸽类扑翼飞行器,工作时,驱动组件驱动扑翼进行上下扑动运动和翼剖面的被动扭转运动,以模仿大自然中鸽类的扑翼运动,来提升仿鸽类扑翼飞行器的升力和推力;在仿鸽类扑翼飞行器飞行过程中,v型尾翼进行姿态控制、姿态平衡、方向控制和提供部分升力;由此,实现了仿鸽类扑翼飞行器的高速飞行,仿鸽类扑翼飞行器能够携带较多的有效载荷,例如,可以携带图传系统,实施回传记载摄像头视频图像。此外,扑翼采用单段翼复合型翼面布局,可以使得扑翼具有较小尺寸特性。
12.在一些实施例中,所述扑翼的翼展为0.8~0.9m。
13.在一些实施例中,每一所述扑翼包括内翼和外翼,所述内翼固定在所述外翼的上表面上,所述内翼用于提升升力,所述外翼用于提升推力。
14.进一步的,所述内翼为泡沫三维立体构型机构,所述内翼具有翼型;所述外翼包括
机翼骨架和伞布蒙皮,所述伞布蒙皮固定在所述机翼骨架上,从而构成二维平面机翼。
15.在一些实施例中,所述外翼的内侧后端通过机翼机身连接杆与所述机身骨架相连,其中,所述外翼的内侧后端与所述机翼机身连接杆的一端固定,所述机翼机身连接杆的另一端与机翼机身连接件球铰接,所述机翼机身连接件固定在所述机身骨架上;
16.所述驱动组件包括电机、减速机构和两个空间四连杆机构,其中,所述电机与所述减速机构相连,所述减速机构的输出传动轴的两端一一对应地与两个所述空间四连杆机构相连,两个所述空间四连杆机构分别一一对应地与两个所述扑翼的所述机翼骨架的前缘骨架相连;所述驱动组件工作时,所述电机驱动所述减速机构运动,所述减速机构通过所述输出传动轴的转动带动两个所述空间四连杆机构运动,两个所述空间四连杆机构的运动带动对应的两个所述扑翼进行上下扑动运动和翼剖面的被动扭转运动。
17.进一步的,每一所述空间四连杆机构均包括第一曲柄、第一连杆和摇臂,每一所述第一曲柄的一端安装在所述输出传动轴的对应端,每一所述第一连杆的一端与所述第一曲柄的另一端球铰接,每一所述第一连杆的另一端与所述摇臂球铰接,所述摇臂的一端与所述前缘骨架的一端固定,所述摇臂的另一端可转动地连接在所述机身骨架上且所述摇臂的另一端的转动轴线沿前后方向延伸;所述空间四连杆机构工作时,所述第一曲柄在所述输出传动轴的转动带动下转动,所述第一曲柄带动所述第一连杆运动,所述第一连杆带动所述摇臂上下运动,从而带动所述扑翼上下扑动和翼剖面的被动扭转运动。
18.再进一步的,每一所述摇臂为尼龙摇臂,每一所述摇臂的外周面上分别固定有铝合金抱箍,每一所述第一连杆的另一端与所述铝合金抱箍球铰接。
19.再进一步的,所述机身骨架上固定有机身摇臂连接板,所述机身摇臂连接板上安装有沿前后方向延伸的摇臂转轴,所述摇臂的另一端设有转孔,所述摇臂的另一端通过所述转孔可转动地套装在所述摇臂转轴上。
20.进一步的,所述减速机构包括一级主动齿轮、一级从动齿轮、二级主动齿轮、二级从动齿轮、一级传动轴和所述输出传动轴,其中,所述电机与所述一级主动齿轮相连,所述一级主动齿轮与所述一级从动齿轮啮合,所述一级从动齿轮和所述二级主动齿轮固定在所述一级传动轴上,所述二级主动齿轮与所述二级从动齿轮啮合,所述二级从动齿轮固定在所述输出传动轴上;所述电机、所述一级传动轴和所述输出传动轴均安装在所述机身骨架上;所述减速机构工作时,所述电机驱动所述一级主动齿轮转动,所述一级主动齿轮带动所述一级从动齿轮及所述一级传动轴转动,所述一级传动轴带动所述二级主动齿轮转动,所述二级主动齿轮驱动所述二级从动齿轮及所述输出传动轴转动,所述输出传动轴转动带动所述空间四连杆机构运动。
21.再进一步的,所述机身骨架包括主骨架、副骨架和连接柱,其中,所述副骨架与所述主骨架在左右方向上间隔开地设置,所述副骨架通过所述连接柱固定在所述主骨架上,所述一级传动轴和所述输出传动轴在左右方向上延伸并在前后方向上间隔开地支撑在所述主骨架和所述副骨架上。
22.再进一步的,所述主骨架上设有第一加强铝合金底座,所述副骨架上设有第二加强铝合金底座,所述第一加强铝合金底座和所述第二加强铝合金座上安装有分别用于支撑所述一级传动轴和所述输出传动轴的轴承。
23.在一些实施例中,所述v型尾翼包括两个尾翼组件,两个所述尾翼组件均包括安定
面、舵面、舵机、第二曲柄和第二连杆,两个所述尾翼组件的所述安定面倾斜设置固定在所述机身骨架上并呈开口朝上的v型布置,两个所述尾翼组件的所述舵面分别位于对应的所述安定面的后方且与对应的所述安定面可左右转动地连接;两个所述尾翼组件的所述舵机分别安装在对应的所述安定面上,两个所述尾翼组件的所述第二曲柄的一端分别安装在对应的所述舵机上,两个所述尾翼组件的所述第二连杆的一端分别与对应的所述第二曲柄的另一端铰接,两个所述尾翼组件的所述第二连杆的另一端分别与对应的所述舵面铰接。
24.再进一步的,两个所述尾翼组件通过尾翼连接件固定在所述机身骨架上。
25.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
26.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
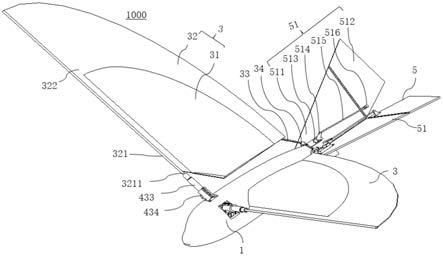
27.图1为本实用新型实施例的仿鸽类扑翼飞行器的立体示意图。
28.图2为本实用新型实施例的仿鸽类扑翼飞行器的机身骨架与驱动组件的装配结构俯视图。
29.图3为本实用新型实施例的仿鸽类扑翼飞行器的机身骨架与驱动组件装配的一个立体示意图。
30.图4为本实用新型实施例的仿鸽类扑翼飞行器的机身骨架与驱动组件装配的另一个立体示意图。
31.图5为本实用新型实施例的仿鸽类扑翼飞行器的尾翼组件与尾翼连接件装配的示意图。
32.图6为本实用新型实施例的仿鸽类扑翼飞行器的尾翼组件与尾翼连接件的爆炸示意图。
33.图7为本实用新型实施例的仿鸽类扑翼飞行器的尾翼连接件与机身骨架的爆炸示意图。
34.附图标记:
35.机身壳体1
36.机身骨架2
37.机身摇臂连接板21机身摇臂锁死板22摇臂转轴23主骨架24
38.副骨架25连接柱26第一加强铝合金底座27
39.第二加强铝合金底座28第一卡槽29
40.扑翼3
41.内翼31
42.外翼32机翼骨架321前缘骨架3211伞布蒙皮322
43.机翼机身连接杆33
44.机翼机身连接件34
45.驱动组件4
46.电机41
47.减速机构42
48.一级主动齿轮421一级从动齿轮422二级主动齿轮423
49.二级从动齿轮424一级传动轴425输出传动轴426轴承427
50.空间四连杆机构43
51.第一曲柄431第一连杆432摇臂433铝合金抱箍434鱼眼球头435
52.v型尾翼5
53.尾翼组件51安定面511舵面512舵机513第二曲柄514第二连杆515
54.舵面舵角516
55.尾翼连接件52第二卡槽521第三卡槽522第四卡槽523
具体实施方式
56.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
57.下面结合图1至图7来描述本实用新型实施例的仿鸽类扑翼飞行器1000的示意图。
58.如图1至图7所示,根据本实用新型实施例的仿鸽类扑翼飞行器1000,包括机身壳体1、机身骨架2、扑翼3、驱动组件4和v型尾翼5。其中,机身骨架2设置在机身壳体1内;扑翼3有两个,两个扑翼3对称地分布在机身壳体1的左右两侧,每一扑翼3采用单段翼复合型翼面布局;驱动组件4安装在机身骨架2上,驱动组件4驱动扑翼3进行上下扑动运动和翼剖面的被动扭转运动,以模仿大自然中鸽类的扑翼3运动,来提升仿鸽类扑翼飞行器1000的升力和推力;v型尾翼5与机身骨架2的尾部固定且位于机身壳体1外,用于在仿鸽类扑翼飞行器1000飞行过程中进行姿态控制、姿态平衡、方向控制和提供部分升力。
59.具体地,机身壳体1内可以安装机身骨架2,对机身骨架2起固定和支撑作用,同时可以保护机身骨架2以及位于机身壳体1内的其他功能部件,此外,机身壳体1的外形要求有利于仿鸽类扑翼飞行器1000的高速飞行。
60.机身骨架2设置在机身壳体1内并与机身壳体1固定,机身骨架2上可以安装驱动组件4,对驱动组件4起着支撑作用;机身骨架2可以与v型尾翼5固定连接,对v型尾翼5起着支撑连接作用;机身骨架2可还以连接其他部件。优选的,机身骨架2的材质可以主要为碳板材质,可以减轻仿鸽类扑翼飞行器1000的重量。
61.扑翼3有两个,两个扑翼3对称地分布在机身壳体1的左右两侧,这意味着,两个扑翼3基本相同,两个基本相同的扑翼3呈左右对称布局;每一扑翼3采用单段翼复合型翼面布局,当扑翼3进行上下扑动运动和翼剖面的被动扭转运动,来模仿大自然中鸽类的扑翼3运动,可以提升仿鸽类扑翼飞行器1000的升力和推力;由此,可以使得扑翼3能够高速飞行,同时采用单段翼复合型翼面布局,可以使得扑翼3具有较小尺寸特性,可以弥补现有中小型扑翼飞行器的空白。
62.驱动组件4安装在机身骨架2上,结构紧凑可靠;驱动组件4的主要作用是驱动扑翼3进行上下扑动运动和翼剖面的被动扭转运动,以模仿大自然中鸽类的扑翼3运动,来提升仿鸽类扑翼飞行器1000的升力和推力。
63.v型尾翼5与机身骨架2的尾部固定且位于机身壳体1外,能够在仿鸽类扑翼飞行器1000飞行过程中进行姿态控制、姿态平衡、方向控制和提供部分升力。
64.根据本实用新型实施例的仿鸽类扑翼飞行器1000,工作时,驱动组件4驱动扑翼3 进行上下扑动运动和翼剖面的被动扭转运动,以模仿大自然中鸽类的扑翼3运动,来提升仿鸽类扑翼飞行器1000的升力和推力;在仿鸽类扑翼飞行器1000飞行过程中,v型尾翼5进行姿态控制、姿态平衡、方向控制和提供部分升力;由此,实现了仿鸽类扑翼飞行器1000的高速飞行,仿鸽类扑翼飞行器1000能够携带较多的有效载荷,例如,可以携带图传系统,实施回传记载摄像头视频图像。此外,扑翼采用单段翼复合型翼面布局,可以使得扑翼3具有较小尺寸特性。
65.在一些实施例中,扑翼3的翼展为0.8~0.9m,意味着,本实用新型的仿鸽类扑翼飞行器1000为中小型扑翼飞行器,可以弥补现有中小型扑翼飞行器的空白,且实现了中小型扑翼飞行器的高速飞行,使得中小型扑翼飞行器能够携带较多的有效载荷,例如,可以携带图传系统,实施回传记载摄像头视频图像。
66.在一些实施例中,每一扑翼3包括内翼31和外翼32,内翼31固定在外翼32的上表面上,内翼31用于提升升力,外翼32用于提升推力,从而有利于保证仿鸽类扑翼飞行器1000的高速飞行。
67.进一步的,内翼31为泡沫三维立体构型机构,内翼31具有翼型,用于提升升力;外翼32包括机翼骨架321和伞布蒙皮322,伞布蒙皮322固定在机翼骨架321上,从而构成二维平面机翼,保证柔性,提升推力。
68.在一些实施例中,外翼32的内侧后端通过机翼机身连接杆33与机身骨架2相连,其中,外翼32的内侧后端与机翼机身连接杆33的一端固定,机翼机身连接杆33的另一端与机翼机身连接件34球铰接,机翼机身连接件34固定在机身骨架2上;由此,通过机翼机身连接杆33和机翼机身连接件34可以方便地将外翼32的内侧后端与机身骨架2相连,同时,通过机翼机身连接杆33的另一端与机翼机身连接件34球交接,可以保证外翼32运动的多个自由度。
69.如图2至图4所示,驱动组件4包括电机41、减速机构42和两个空间四连杆机构 43,其中,电机41与减速机构42相连,减速机构42的输出传动轴426的两端一一对应地与两个空间四连杆机构43相连,两个空间四连杆机构43分别一一对应地与两个扑翼3的机翼骨架321的前缘骨架3211相连;驱动组件4工作时,电机41驱动减速机构 42运动,减速机构42通过输出传动轴426的转动带动两个空间四连杆机构43运动,两个空间四连杆机构43的运动带动对应的两个扑翼3进行上下扑动运动和翼剖面的被动扭转运动。可以理解的是,电机41是作为扑翼3运动的动力源,通过减速机构42减速和空间四连杆机构43的运动,达到所需要的扑翼3运动的频率。
70.进一步的,每一空间四连杆机构43均包括第一曲柄431、第一连杆432和摇臂433,每一第一曲柄431的一端安装在输出传动轴426的对应端,每一第一连杆432的一端与第一曲柄431的另一端球铰接,例如可以为如图4所示的鱼眼球头435连接,每一第一连杆432的另一端与摇臂433球铰接,例如可以为如图4所示的鱼眼球头435连接,摇臂433的一端与前缘骨架3211的一端固定,摇臂433的另一端可转动地连接在机身骨架2上且摇臂433的另一端的转动轴线沿前后方向延伸;空间四连杆机构43工作时,第一曲柄431在输出传动轴426
的转动带动下转动,第一曲柄431带动第一连杆432运动,第一连杆432带动摇臂433上下运动,从而带动扑翼3上下扑动和翼剖面的被动扭转运动。
71.再进一步的,每一摇臂433为尼龙摇臂433,每一摇臂433的外周面上分别固定有铝合金抱箍434,每一第一连杆432的另一端与铝合金抱箍434球铰接。可以理解的是,尼龙摇臂433的外周面上固定有铝合金抱箍434,构成复合加强版摇臂433,因为第一连杆432和球铰直接与尼龙摇臂433连接情况下,在高载荷、高频率的运动中,尼龙摇臂433容易磨损,导致传动失效,因此尼龙摇臂433局部采用铝合金抱箍434,增强局部强度和耐磨性,改善尼龙摇臂433使用寿命。
72.再进一步的,机身骨架2上固定有机身摇臂连接板21,具体的,机身摇臂连接板 21通过机身摇臂锁死板22固定在机身骨架2上;机身摇臂连接板21上安装有沿前后方向延伸的摇臂转轴23,摇臂转轴23通过机身摇臂连接板21支撑固定,摇臂433的另一端设有转孔,摇臂433的另一端通过转孔可转动地套装在摇臂转轴23上。由此实现了摇臂433的另一端可转动地连接在机身骨架2上且摇臂433的另一端的转动轴线沿前后方向延伸。需要说明的是,机身摇臂连接板21和机身摇臂锁死板22的材质优选为碳板材质。
73.如图2至4所示,进一步的,减速机构42为纵列式二级减速机构42,减速齿轮和齿轮轴沿着机身纵向轴线分布。具体地,减速机构42包括一级主动齿轮421、一级从动齿轮422、二级主动齿轮423、二级从动齿轮424、一级传动轴425和输出传动轴426,其中,电机41与一级主动齿轮421相连,一级主动齿轮421与一级从动齿轮422啮合,一级从动齿轮422和二级主动齿轮423固定在一级传动轴425上,二级主动齿轮423与二级从动齿轮424啮合,二级从动齿轮424固定在输出传动轴426上;电机41、一级传动轴425和输出传动轴426均安装在机身骨架2上;减速机构42工作时,电机41驱动一级主动齿轮421转动,一级主动齿轮421带动一级从动齿轮422及一级传动轴425转动,一级传动轴425带动二级主动齿轮423转动,二级主动齿轮驱动二级从动齿轮及输出传动轴426转动,输出传动轴426转动带动空间四连杆机构43运动。可以理解的是,通过两级减速,可以达到扑翼3运动所需要的频率。
74.如图2所示,再进一步的,机身骨架2包括主骨架24、副骨架25和连接柱26,其中,副骨架25与主骨架24在左右方向上间隔开地设置,副骨架25通过连接柱26固定在主骨架24上,一级传动轴425和输出传动轴426在左右方向上延伸并在前后方向上间隔开地支撑在主骨架24和副骨架25上;电机41可以固定在主骨架24上。
75.具体的,主骨架24可以为碳板主骨架24,副骨架25可以为碳板副骨架25,连接柱26为铝柱,碳板主骨架24和碳板副骨架25通过铝柱连接固定,构成机身结构基体。为了保证良好的装配公差、配合精度和耐磨性,主骨架24上设有第一加强铝合金底座 27,副骨架25上设有第二加强铝合金底座28,第一加强铝合金底座27和第二加强铝合金底座28上安装有分别用于支撑一级传动轴425和输出传动轴426的轴承427,一级传动轴425及输出传动轴426与轴承427紧配合,穿过整个机身骨架2,一级传动轴425 及输出传动轴426与各级减速齿轮紧配合,起到传递扭矩和运动的作用,以上部件和连接方式构成了加强版机体结构。
76.如图1、图5至图7所示,在一些实施例中,v型尾翼5包括两个尾翼组件51,两个尾翼组件51均包括安定面511、舵面512、舵机513、第二曲柄514和第二连杆515,两个尾翼组件51的安定面511倾斜设置固定在机身骨架2上并呈开口朝上的v型布置,两个尾翼组件51的舵面512分别位于对应的安定面511的后方且与对应的安定面511 可左右转动地连接;两个尾
翼组件51的舵机513分别安装在对应的安定面511上,两个尾翼组件51的第二曲柄514的一端分别安装在对应的舵机513上,两个尾翼组件51 的第二连杆515的一端分别与对应的第二曲柄514的另一端铰接,两个尾翼组件51的第二连杆515的另一端分别与对应的舵面512铰接。由此,两个尾翼组件51的舵面512 的左右转动分别通过各自的舵机513、第二曲柄514和第二连杆515来驱动,实现独立控制。通过设置上述v型尾翼5,可以在仿鸽类扑翼飞行器1000飞行过程中进行姿态控制、姿态平衡、方向控制和提供部分升力。
77.优选的,安定面511的倾斜角度(即安定面511与竖直面的夹角)范围可以为40-60
°
,可以较好地在仿鸽类扑翼飞行器1000飞行过程中进行姿态控制、姿态平衡、方向控制和提供部分升力;安定面511和舵面512通过纤维胶带粘接,二者可以相对粘接的连接部分产生相对转动,连接方式简单,粘结牢固。
78.尾翼组件51的第二连杆515的另一端分别与舵面512铰接,具体地,可以通过在舵面512上设有舵面舵角516,第二连杆515的另一端与舵面舵角516相连,连接方式简单,能较好地带动舵面512转动。
79.进一步的,两个尾翼组件51通过尾翼连接件52固定在机身骨架2上,连接方便。
80.具体地,机身骨架2上设有用于卡住尾翼连接件52的第一卡槽29,尾翼连接件52 为碳板卡接件,尾翼连接件52上设有与用于卡住机身骨架2的第二卡槽521,在第一卡槽29卡住尾翼连接件52的同时,第二卡槽521可以卡住机身骨架2,由此实现尾翼连接件52与机身骨架2互卡,连接可靠。尾翼连接件52上还设有用于分别卡住两个尾翼组件51的舵面512的第三卡槽522和第四卡槽523,期中,第三卡槽522可以卡住两个尾翼组件51中的一个尾翼组件51的舵面512,第三卡槽522可以卡住两个尾翼组件51 中的另一个尾翼组件51的舵面512。
81.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
82.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。