1.本实用新型涉及空港地面设备技术领域,具体是指一种传送平台自动调平装置及装载机。
背景技术:
2.集装货物装载机广泛用于各大机场,现有的装载机一般包括底盘、整车plc控制器、锂电池动力装置和行驶电机,整车plc控制器用于控制电动式机场集装货物装载机工作,底盘上连接有前桥和传送平台,传送平台包括主平台和桥平台,主平台设有传送电机、链条、传送滚轮和电机控制器,桥平台设有传送电机、链条、传送滚轮和电机控制器,主平台与桥平台对接完成货物输送,如中国专利cn214059744u公开了一种电动式飞机集装升降平台车,其特征在于:其包括车架、操作台、主平台、桥平台和动力部分,所述动力部分包括电池舱、主电机、再生电机、行驶电机、第一液压泵、第二辅助液压泵、液压马达、逆变器,所述主平台和桥平台上分别设置有履带和万向轮,所述桥平台上固设有所述操作台,所述车架通过第一举升机构和所述主平台连接,所述车架通过第二举升机构和所述桥平台连接,所述第一举升机构驱动所述主平台升降动作,所述第二举升机构驱动所述桥平台升降动作,使用时,主平台的第一举升机构托着主平台升到与桥平台一样高的位置,与之对接,实现货物传递,上述专利与现有技术的不足是:一是主平台和桥平台通过举升机构举升高度一致方可对接,但是主平台和桥平台的高度一致需要多次调节,费时费力,间接导致货物传送速度低;二是主平台和桥平台高度不一致时,货物传输就容易卡滞,影响输送效率,还可能将货物颠出去;三是主平台在举升过程中,如果没有限位,上升速度太快,主平台可能会将桥平台掀翻,撞到飞机上。
技术实现要素:
3.本实用新型的目的是为了解决现有技术不足,提供一种主平台与桥平台对接高度一致、对接平稳、安全、货物传送效率高的传送平台自动调平装置及装载机。
4.为实现上述目的,本实用新型所采用的技术方案是:
5.一种传送平台自动调平装置,包括主平台和桥平台,其特征在于:所述主平台和桥平台之间设有自动调平机构,所述自动调平机构包括挡板、托板、低位传感器和相平传感器,所述主平台和桥平台之间至少设有一个挡板,所述主平台上设有托板,所述托板一端与主平台固定连接,另一端露出主平台并置于挡板下方,所述挡板与桥平台铰接,挡板两端呈自由端,所述挡板一端朝向托板并固定设有低位传感器,挡板另一端和桥平台之间设有相平传感器,所述相平传感器一端与桥平台固定连接,另一端与挡板间隔设置,以利于使用时,随着主平台的上升,托板接触到挡板上的低位传感器时,低位传感器感应到托板,通过装载机控制系统降低主平台的上升速度,使得主平台的上升速度由快速切换为慢速,托板托着挡板一端向上转动,挡板另一端向下转动,当相平传感器感应到挡板时,装载机控制系统控制主平台停止上升,实现主平台和桥平台的相平,调节方便,输送货物稳当。
6.本实用新型所述相平传感器一侧设有跟随传感器,所述跟随传感器一端与桥平台固定连接,另一端朝向挡板,所述跟随传感器的高度高于相平传感器的高度,以利于使用时,随着主平台的上升,托板接触到挡板上的低位传感器时,低位传感器感应到托板,通过装载机控制系统降低主平台的上升速度,使得主平台的上升速度由快速切换为慢速,托板托着挡板一端向上转动,挡板另一端向下转动,当跟随传感器感应到挡板时,装载机控制系统控制主平台跟随桥平台升降,直至相平。
7.本实用新型所述相平传感器一侧设有高位传感器,所述高位传感器一端与桥平台固定连接,另一端朝向挡板,所述高位传感器的高度低于相平传感器的高度,以利于使用时,当相平传感器发生故障时,导致主平台继续上升,托板托着挡板一端继续向上转动,挡板另一端向下转动,高位传感器接触到挡板,装载机控制系统控制主平台下降,不在上升。
8.本实用新型所述相平传感器一侧设有超高停机保护传感器,所述超高停机保护传感器一端与桥平台固定连接,另一端朝向挡板,所述超高停机保护传感器的高度低于相平传感器的高度,以利于使用时,当挡板或桥平台上其他传感器发生故障导致主平台一直上升,托板托着挡板一端继续向上转动,挡板另一端向下转动,超高停机传感器感应到挡板,装载机控制系统切断动力,主平台停止上升。
9.本实用新型所述相平传感器一侧设有挡板放下传感器,所述挡板放下传感器一端与桥平台固定连接,另一端朝向挡板,所述挡板放下传感器的高度高于相平传感器的高度,以利于通过挡板放下传感器来检测挡板的位置,确认挡板处于被托板托起转动的状态。
10.一种装载机,包括底盘,其特征在于:所述底盘上设有上述所述的传送平台自动调平装置,所述主平台和桥平台分别经举升机构与底盘连接,以利于装载机在与飞机对接时,通过传送平台自动调平装置调平后实现快速传送货物。
11.本实用新型由于采用上述结构,具有主平台与桥平台对接高度一致、对接平稳、安全、货物传送效率高等优点。
附图说明
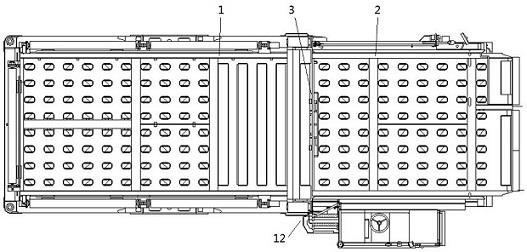
12.图1是本实用新型中装载机和装载机上传送平台自动调平装置的结构示意图。
13.图2是本实用新型图1的侧视图。
14.图3是本实用新型图2中自动调平机构的放大图。
15.图4是本实用新型中挡板和桥平台上各传感器的放大示意图。
16.附图标记:主平台1,桥平台2,自动调平机构3,挡板4,托板5,低位传感器6,相平传感器7,高位传感器8,跟随传感器9,超高停机保护传感器10,挡板放下传感器11。
具体实施方式
17.下面结合附图,对本实用新型的具体实施方式作进一步详细描述。
18.一种传送平台自动调平装置,包括主平台1和桥平台2,其特征在于:所述主平台1和桥平台2之间设有自动调平机构3,所述自动调平机构3包括挡板4、托板5、低位传感器6和相平传感器7,所述主平台1和桥平台2之间至少设有一个挡板4,所述主平台1上设有托板5,所述托板5一端与主平台1固定连接,另一端露出主平台1并置于挡板4下方,所述挡板4与桥平台2铰接,挡板4两端呈自由端,所述挡板4一端朝向托板5并固定设有低位传感器6,挡板4
另一端和桥平台2之间设有相平传感器7,所述相平传感器7一端与桥平台2固定连接,另一端与挡板4间隔设置,以利于使用时,随着主平台的上升,托板接触到挡板上的低位传感器时,低位传感器感应到托板,通过装载机控制系统降低主平台的上升速度,使得主平台的上升速度由快速切换为慢速,托板托着挡板一端向上转动,挡板另一端向下转动,当相平传感器感应到挡板时,装载机控制系统控制主平台停止上升,实现主平台和桥平台的相平,调节方便,输送货物稳当。
19.本实用新型所述相平传感器7一侧设有跟随传感器9,所述跟随传感器9一端与桥平台2固定连接,另一端朝向挡板4,所述跟随传感器9的高度高于相平传感器7的高度,以利于使用时,随着主平台的上升,托板接触到挡板上的低位传感器时,低位传感器感应到托板,通过装载机控制系统降低主平台的上升速度,使得主平台的上升速度由快速切换为慢速,托板托着挡板一端向上转动,挡板另一端向下转动,当跟随传感器感应到挡板时,装载机控制系统控制主平台跟随桥平台升降,直至相平。
20.本实用新型所述相平传感器7一侧设有高位传感器8,所述高位传感器8一端与桥平台2固定连接,另一端朝向挡板4,所述高位传感器8的高度低于相平传感器7的高度,以利于使用时,当相平传感器发生故障时,导致主平台继续上升,托板托着挡板一端继续向上转动,挡板另一端向下转动,高位传感器接触到挡板,装载机控制系统控制主平台下降,不在上升。
21.本实用新型所述相平传感器7一侧设有超高停机保护传感器10,所述超高停机保护传感器10一端与桥平台2固定连接,另一端朝向挡板4,所述超高停机保护传感器10的高度低于相平传感器7的高度,以利于使用时,当挡板或桥平台上其他传感器发生故障导致主平台一直上升,托板托着挡板一端继续向上转动,挡板另一端向下转动,超高停机传感器感应到挡板,装载机控制系统切断动力,主平台停止上升。
22.本实用新型所述相平传感器7一侧设有挡板放下传感器11,所述挡板放下传感器11一端与桥平台2固定连接,另一端朝向挡板4,所述挡板放下传感器11的高度高于相平传感器7的高度,以利于通过挡板放下传感器来检测挡板的位置,确认挡板处于被托板托起转动的状态。
23.一种装载机,包括底盘12,其特征在于:所述底盘12上设有上述所述的传送平台自动调平装置,所述主平台1和桥平台2分别经举升机构与底盘12连接,以利于装载机在与飞机对接时,通过传送平台自动调平装置调平后实现快速传送货物。
24.使用时,如附图1-附图4,装载机一般包括底盘和整车plc控制器,底盘上连接有前桥和传送平台,传送平台包括主平台和桥平台,主平台和桥平台下端分别设有举升机构,用于驱动主平台和桥平台升降,此部分与现有技术相同,不赘述,使用前,低位传感器、相平传感器、高位传感器、跟随传感器、超高停机保护传感器、挡板放下传感器均与plc控制器连接,为减少主平台和桥平台对接间隙,可在桥平台朝向主平台的一端中部设置一个凹槽,用于安装自动调平机构,附图1和附图2所示,挡板安装在桥平台的凹槽内,桥平台上可设置一个挡板,也可以设置两个挡板,当设置一个挡板时,挡板中间偏上的位置与桥平台铰接,挡板一端朝下朝向挡板并固定安装低位传感器,挡板另一端朝上,朝上的挡板与桥平台之间依次间隔设置挡板放下传感器、跟随传感器、相平传感器、高位传感器、超高停机保护传感器,挡板放下传感器、跟随传感器、相平传感器、高位传感器、超高停机保护传感器在桥平台
上的位置高度依次降低;当设置两个挡板时,如附图4所示,桥平台的凹槽内,左面设置左挡板,右面设置右挡板,左挡板中上部和右挡板中上部分别与桥平台铰接,左挡板下端固定安装低位传感器,左挡板右端与桥平台之间设置挡板放下传感器、相平传感器和超高停机保护传感器,挡板放下传感器、相平传感器和超高停机保护传感器分别固定在桥平台上并与左挡板间隔设置,挡板放下传感器、相平传感器和超高停机保护传感器在桥平台上的位置高度依次降低,右挡板左端朝下呈自由端,右挡板右端和桥平台之间设置跟随传感器、高位传感器和超高停机保护传感器,跟随传感器、高位传感器和超高停机保护传感器固定在桥平台上,并与右挡板间隔设置,跟随传感器、高位传感器和超高停机保护传感器在桥平台上的位置高度依次降低,本实施例中超高停机保护传感器设置两个,也可以设置一个,根据需求设置即可,托板位于两个挡板的下方,用于托起并带动两个挡板转动,低位传感器可以设置成主平台上端面高度低于桥平台上端面高度为100mm时感应,跟随传感器可以设置成主平台上端面高度低于桥平台上端面高度为30mm时感应,挡板放下传感器可以设置成主平台上端面高度低于桥平台上端面高度在100-30之间任意数值时感应,用于感应挡板被托起,相平传感器设置成主平台上端面高度和桥平台上端面高度一致时感应,高位传感器可以设置成主平台上端面高度高于桥平台上端面高度为20mm时感应,超高停机保护传感器可根据要求设置主平台上端面高度高于桥平台上端面高度的数值,比如30mm
‑ꢀ
50mm之间任意数值时感应,本实用新型所述各传感器的实施例数值不局限于本实施例中的具体数值,可根据具体需求来设定,
25.使用时,以桥平台上安装左挡板和右挡板两个挡板为例,
26.当主平台从低位开始快速上升至低于桥平台100mm时,托板上端面抵在左挡板右端的低位传感器上,低位传感器接收到信号并传递给plc控制器,plc控制器控制主平台的举升机构,使得主平台的上升速度由快速降为慢速,主平台慢速继续上升,挡板放下传感器感应到左挡板,表明主平台在持续上升,托板托着左挡板右端和右挡板左端分别向上转动,直到主平台上升至低于桥平台38mm,跟随传感器感应到右挡板右端,将信号传递给plc控制器,plc控制器控制主平台的举升机构和桥平台的举升机构,主平台处于跟踪升降状态,能跟随桥平台同时升降,直至相平,主平台和桥平台上端面高度一致时,相平传感器接收到信号,传递给plc控制器,plc控制器控制主平台的举升机构,使得主平台停止上升,可以进行货物输送工作;如果低位传感器、挡板放下传感器以及相平传感器出故障,导致主平台继续上升,当主平台上升到高于桥平台20mm时,高位传感器感应到右挡板,将信号传递给plc控制器,plc控制器控制主平台的举升机构,使得主平台下降;如果高位传感器也出现故障,导致主平台继续上升,左挡板右端和右挡板左端随托板不停上升,使得超高停机保护传感器感应到左挡板左端和右挡板右端,将信号传递给plc控制器,plc控制器控制主平台和桥平台同时停止升降,待工作人员维修后再次使用,本实用新型结构简单,通过自动调平机构使得主平台可自动对接桥平台,调节速度快、对接平稳、货物传送流畅,不卡滞,间接提高了货物传送速度。
27.本实用新型由于采用上述结构,具有主平台与桥平台对接高度一致、对接平稳、安全、货物传送效率高等优点。