1.本实用新型属于无人机勘探采集技术领域,具体涉及一种无人机激光点云高效采集设备。
背景技术:
2.机载激光雷达的工作方式和原理,即激光测距系统向探测目标主动发射高频率的激光脉冲,直接获取地物表面的距离、坡度、粗糙度和反射率等信息,经过处理生成高密度的三维空间坐标,即点云。激光点云数据的每个点不仅具有x、y平面坐标信息,还具有高程信息,即z值,同时还可从不同视角对这些点云进行三维显示、量测,计算点云所表达目标的表面积、体积等,这也是激光雷达区别于传统光学遥感和微波遥感数据的最大优点,传统旋翼激光雷达系统由于其航时短、速度慢、载荷低、需要目视操作等导致的作效率低、人工成本高、耗时长、作业难度大等问题,本实用新型无人机激光点云雷达设备采用cw-30lidar,是垂直起降固定翼激光雷达扫描系统,高度集成lidar扫描仪、gnss高精度定位系统、imu系统、高速数据采集存储系统、全画幅相机等;测量距离远、精度高;支持无基准站功能,无需架设基准站以及打点,使用方便,作业范围不受基准站限制;支持大测区功能,作业效率高;支持多卫星导航系统rtk+imu松耦合、紧耦合方式,支持后处理功能、快速生成原始点云,支持真彩色点云,可广泛应用于测绘、交通、电力、数字城市、高精度地图、侦察、建筑等领域。
技术实现要素:
3.针对上述背景技术所提出的问题,本实用新型的目的是:旨在提供一种无人机激光点云高效采集设备。
4.为实现上述技术目的,本实用新型采用的技术方案如下:一种无人机激光点云高效采集设备,包括无人机,所述无人机安装有全画幅相机,所述无人机底部安装有十字形支架,所述十字形支架四角安装有空气减震,四个所述空气减震连接有电路板,所述电路板上面安装有gnss高精度定位系统、惯性导航系统和高速数据采集存储系统,所述电路板下面安装有航向电机,所述航向电机转动连接有竖杆,所述竖杆安装有俯仰电机,所述俯仰电机连接有横杆,所述横杆安装有横滚电机,所述横滚电机连接有安装块,所述安装块安装有激光扫描仪。
5.进一步限定,所述无人机平飞动力为柴油机发动机,这样的设计,续航时间长,工作效率快。
6.进一步限定,所述激光扫描仪为cw-30lidar,是垂直起降固定翼激光雷达扫描系统,这样的设计,可以保证该装置长航时、高精度、高安全性、自主飞行无需人工干预、垂直起降、高效率等优点。
7.进一步限定,所述全画幅相机集成了光电吊舱与图传技术,这样的设计,无人机搭载光电吊舱巡线作业环境适应性强、准确性高,具备巡线速度快、应急反应迅速、及时发现缺陷等。
8.进一步限定,所述gnss高精度定位系统支持无基准站功能,无需架设基准站以及打点,这样的设计,使用方便,作业范围不受基准站限制;支持大测区功能,作业效率高。
9.采用本实用新型的有益效果:
10.1、本实用新型无人机激光点云雷达设备采用cw-30lidar,是垂直起降固定翼激光雷达扫描系统。高度集成lidar扫描仪、gnss高精度定位系统、imu系统、高速数据采集存储系统、全画幅相机等;测量距离远、精度高;支持无基准站功能,无需架设基准站以及打点,使用方便,作业范围不受基准站限制;支持大测区功能,作业效率高;支持多卫星导航系统rtk+imu松耦合、紧耦合方式,支持后处理功能、快速生成原始点云,支持真彩色点云,可广泛应用于测绘、交通、电力、数字城市、高精度地图、侦察、建筑等领域。
附图说明
11.本实用新型可以通过附图给出的非限定性实施例进一步说明;
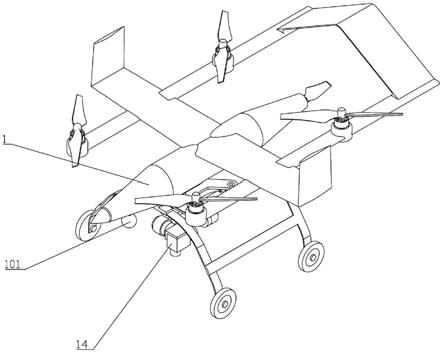
12.图1为本实用新型一种无人机激光点云高效采集设备实施例的轴测图1;
13.图2为本实用新型一种无人机激光点云高效采集设备实施例的右视图;
14.图3为本实用新型一种无人机激光点云高效采集设备实施例的轴测图2;
15.图4为本实用新型一种无人机激光点云高效采集设备实施例的平面图;
16.图5为本实用新型一种无人机激光点云高效采集设备实施例的工作示意图;
17.主要元件符号说明如下:无人机1、全画幅相机101、十字形支架2、空气减震3、电路板4、gnss高精度定位系统5、惯性导航系统6、高速数据采集存储系统7、航向电机8、竖杆9、俯仰电机10、横杆11、横滚电机12、安装块13、激光扫描仪14。
具体实施方式
18.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
19.如图1~5所示,本实用新型的一种无人机激光点云高效采集设备,包括无人机1,无人机1安装有全画幅相机101,无人机1底部安装有十字形支架2,十字形支架2四角安装有空气减震3,四个空气减震3连接有电路板4,电路板4上面安装有gnss高精度定位系统5、惯性导航系统6和高速数据采集存储系统7,电路板4下面安装有航向电机8,航向电机8转动连接有竖杆9,竖杆9安装有俯仰电机10,俯仰电机10连接有横杆11,横杆11安装有横滚电机12,横滚电机12连接有安装块13,安装块13安装有激光扫描仪14。
20.本实施案例中,在使用一种无人机激光点云高效采集设备的时候,总共分为五步走,首先做好航测准备,然后航测飞行,然后数据预处理,之后数据后处理,最后生成数字产品,人工遥控操作无人机,航测准备包括航测设计、测区踏勘、空域申请,然后进行设备安装调试、地面引导站建立、航线规划,航测飞行时imu数据采集、机载gnss数据采集、基站gnss/cors数据采集、激光雷达数据采集,数据预处理时rtk处理航测飞行时采集的imu、机载gnss和基站gnss/cors数据,然后gnss/imu进行联合解算生成航迹数据,最后结合激光雷达数据生成带坐标的激光数据,数据后处理时进行激光数据分类,同时对交跨、危险点分析、工况分析等等后处理分析,最后生成完整的电力分析报告。
21.优选无人机1平飞动力为柴油机发动机,这样的设计,续航时间长,工作效率快,实
际上,也可根据具体情况考虑其他方式保证长续航。
22.优选激光扫描仪14为cw-30lidar,是垂直起降固定翼激光雷达扫描系统,这样的设计,可以保证该装置长航时、高精度、高安全性、自主飞行无需人工干预、垂直起降、高效率等优点,实际上,也可根据具体情况考虑其他雷达扫描系统。
23.优选全画幅相机101集成了光电吊舱与图传技术,这样的设计,无人机搭载光电吊舱巡线作业环境适应性强、准确性高,具备巡线速度快、应急反应迅速、及时发现缺陷等,实际上,也可根据具体情况考虑其他技术。
24.优选gnss高精度定位系统5支持无基准站功能,无需架设基准站以及打点,这样的设计,使用方便,作业范围不受基准站限制;支持大测区功能,作业效率高,实际上,也可根据具体情况考虑其他定位系统。
25.上述实施例仅示例性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。