1.本发明属于无人机物流技术领域,更具体地说,特别涉及一种基于固定翼物流无人机。
背景技术:
2.无人机快递即通过利用无线电遥控设备和自备的程序控制装置操纵的无人驾驶的低空飞 行器运载包裹,自动送达目的地,其优点主要在于解决偏远地区的配送问题,提高配送效率, 同时减少人力成本。缺点主要在于恶劣天气下无人机会送货无力,在飞行过程中,无法避免 人为破坏等,目前顺丰快递已有,但未大范围使用,在物流运输时会使用固定翼无人机,固 定翼无人机分为大型和小型,小型的固定翼无人机多为多轴无人机,小型的固定翼无人机操 作方便、成本低,用于比较广泛。
3.例如申请号:cn201710543400.0的中国发明专利,该专利公开了一种一主翼四副翼短途 物流无人机,包括主控制盒、主旋翼、副旋翼、连接杆、挂钩;所述主控制盒为椎体形状, 主控制盒顶部通过垂直的传动轴连接安装有主旋翼,主控制盒底部安装有多个挂钩,主控制 盒的侧斜面上固定有连接杆,连接杆的外端连接安装有副旋翼;所述连接杆的数量为四个, 以主控制盒的轴心为圆心以圆周均布;所述主旋翼通过主控制盒内的电机驱动,所述副旋翼 通过安装在连接杆内并电路连接至主控制盒内控制芯片的电机驱动。本发明通过主控制盒、 主旋翼、副旋翼、连接杆、挂钩的设置,能确保主旋翼起升下降,四个副翼独立进行方向调 整,从而满足可平稳运行不倾斜的物流运输要求。
4.基于对专利号的搜索,结合现有技术中的不足发现:
5.现有的小型固定翼无人机在物品运输时,无人机底部的安装支架可调节的效果较差,不 能对不同大小的货物快速夹紧,在货物不符合安装座的最佳安装位置时,需要将货物进行捆 绑输送,在货物运输时比较费力,无人机将货物运输时需要将货物放置到安装支架上,或者 将货物捆绑后通过挂钩进行固定,无人机不能同时实现挂钩和安装支架两者的结合,带有安 装支架的无人机在到达运输位置时不能快速将货物卸载,需要手动将货物卸载,这就需要控 制员时刻注视无人机的卸载过程,拆卸时比较麻烦。
6.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种基于固定翼物流无人 机,以期达到更具有更加实用价值性的目的。
技术实现要素:
7.为了解决上述技术问题,本发明提供一种基于固定翼物流无人机,以解决现有的小型固 定翼无人机在物品运输时,无人机底部的安装支架可调节的效果较差,不能对不同大小的货 物快速夹紧,在货物不符合安装座的最佳安装位置时,需要将货物进行捆绑输送,在货物运 输时比较费力,无人机将货物运输时需要将货物放置到安装支架上,或者将货物捆绑后通过 挂钩进行固定,无人机不能同时实现挂钩和安装支架两者的结合,带有安装支架的无人机在 到达运输位置时不能快速将货物卸载,需要手动将货物卸载,这就需要
控制员时刻注视无人 机的卸载过程,拆卸时比较麻烦的问题。
8.本发明用于一种基于固定翼物流无人机的目的与功效,由以下具体技术手段所达成:
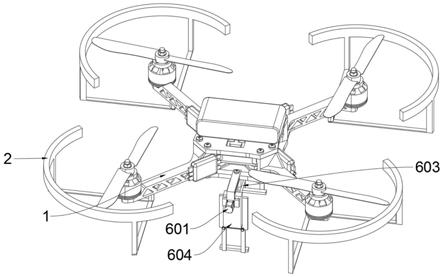
9.一种基于固定翼物流无人机,包括固定翼;所述固定翼共有四个组成,且四个固定翼呈 环形阵列状安装在机体上,固定翼的底部卡接有一个保护罩;机体上安装有一个所述底板, 且底板上对称安装有两个支撑座;所述两个支撑座之间安装有一组夹紧机构,且夹紧机构上 安装有一个挂钩;所述夹紧机构上安装有一个滑动连接的夹紧板,且夹紧板上设有摩擦块, 夹紧机构上安装有两组刮除块;所述夹紧板的一侧设有一个t形滑动块,且滑动座上开设有 一个与夹紧板滑动块相契合的滑动槽,滑动槽内开设有一个与限位杆b相契合的凹槽,限位 杆b安装在滑动座的滑动槽内,限位杆b和夹紧板的滑动块之间安装有两个复位弹簧。
10.进一步的,所述固定翼包括有连接套,固定翼的底部开设有一个螺纹孔,且螺纹孔上安 装有一个连接套,连接套上开设有一个矩形槽,矩形槽上对称开设有两个半圆槽,保护罩上 设有一个矩形卡块,卡块与连接套的凹槽相契合,卡块上对称设有两个半圆凸起,半圆凸起 和连接套的半圆槽相对正。
11.进一步的,所述底板上对称开设有两组与支撑座相契合的矩形槽,且底板的矩形槽上开 设有一组方便支撑座固定的螺纹孔。
12.进一步的,所述支撑座包括有触碰开关,支撑座为f形结构,且其中一个支撑座的底部 安装有一个触碰开关,触碰开关和伺服电机电性连接,夹紧板上设有一个与触碰开关相对正 的挤压杆,支撑座上开设有一组与伺服电机安装孔相对正的螺纹孔。
13.进一步的,所述夹紧机构包括有伺服电机、螺纹杆、限位杆a和滑动座,伺服电机通过 螺栓固定在支撑座上,且伺服电机的转动轴上安装有一个螺纹杆,两个限位杆a均安装在两 个支撑座之间,滑动座上开设有一个与螺纹杆相契合的螺纹孔,滑动座上对称开设有两个与 限位杆a相契合的圆形孔,螺纹杆和限位杆a均贯穿于滑动座上。
14.进一步的,所述螺纹杆上对称设有两端螺旋方向相反的外螺纹,且螺纹杆的中间位置为 光轴,光轴上开设有一个环形槽,挂钩上设有一个与环形槽相契合的连接环,挂钩通过连接 环固定在螺纹杆上。
15.进一步的,所述夹紧板的底部对称开设有两个矩形槽,且矩形槽上滑动连接有一个u形 结构的支撑块,夹紧板上安装有一组固定支撑块的螺栓。
16.进一步的,所述滑动座上对称安装有两组刮除块,且刮除块上设有一个三角状凸起,三 角状凸起与螺纹杆的螺纹相对正。
17.与现有技术相比,本发明具有如下有益效果:
18.本发明改进了无人机的运输结构:
19.通过在底板上设置的凹槽方便支撑座的安装,在螺纹杆上设置有滑动座,按动触碰开关 控制伺服电机正转,伺服电机转动带动两个滑动座同时向内侧移动,从而使夹紧板将物品夹 紧,通过触碰开关和夹紧板的设置,在无人机下降后夹紧板受重力影响会向上移动,从而使 夹紧板上的挤压杆挤压触碰开关,使得伺服电机反转,夹紧板向外侧移动,使得运输物品从 夹紧板之间自动脱落,方便物品的卸载;
20.在螺纹杆上设置有挂钩,挂钩方便对一些较大物品的运输,挂钩还方便对夹紧板
括有连接套101,固定翼1的底部开设有一个螺纹孔,且螺纹孔上安装有一个连接套101,连 接套101上开设有一个矩形槽,矩形槽上对称开设有两个半圆槽,保护罩2上设有一个矩形 卡块,卡块与连接套101的凹槽相契合,卡块上对称设有两个半圆凸起,半圆凸起和连接套 101的半圆槽相对正,使用时,连接套101上的矩形槽起到了保护罩2周向限位的效果,半 圆凸起和连接套101的半圆槽相配合起到了保护罩2辅助固定的效果,连接套101上的矩形 槽方便保护罩2的安装与更换;机体上安装有一个底板3,且底板3上对称安装有两个支撑 座5;两个支撑座5之间安装有一组夹紧机构6,且夹紧机构6上安装有一个挂钩4;夹紧机 构6上安装有一个滑动连接的夹紧板7,且夹紧板7上设有摩擦块,夹紧机构6上安装有两 组刮除块9;夹紧板7的一侧设有一个t形滑动块,且滑动座604上开设有一个与夹紧板7 滑动块相契合的滑动槽,滑动槽内开设有一个与限位杆b8相契合的凹槽,限位杆b8安装在 滑动座604的滑动槽内,限位杆b8和夹紧板7的滑动块之间安装有两个复位弹簧,使用时, 在夹紧板7将物品夹紧时可以上下晃动,在物品运输过程中复位弹簧对物品进行缓冲吸震, 两个复位弹簧起到了夹紧板7不受重力的影响下能够自动复位。
39.其中,底板3上对称开设有两组与支撑座5相契合的矩形槽,且底板3的矩形槽上开设 有一组方便支撑座5固定的螺纹孔,使用时,底板3上的矩形槽方便支撑座5的安装。
40.其中,支撑座5包括有触碰开关501,支撑座5为f形结构,且其中一个支撑座5的底 部安装有一个触碰开关501,触碰开关501和伺服电机601电性连接,夹紧板7上设有一个 与触碰开关501相对正的挤压杆,支撑座5上开设有一组与伺服电机601安装孔相对正的螺 纹孔,使用时,支撑座5的f形结构增大了支撑座5的支撑力,在无人机下降后夹紧板7受 重力影响会向上移动,从而使夹紧板7上的挤压杆挤压触碰开关501,使得伺服电机601反 转,夹紧板7向外侧移动,使得运输物品从夹紧板7之间自动脱落,方便物品的卸载。
41.其中,夹紧机构6包括有伺服电机601、螺纹杆602、限位杆a603和滑动座604,伺服 电机601通过螺栓固定在支撑座5上,且伺服电机601的转动轴上安装有一个螺纹杆602, 两个限位杆a603均安装在两个支撑座5之间,滑动座604上开设有一个与螺纹杆602相契合 的螺纹孔,滑动座604上对称开设有两个与限位杆a603相契合的圆形孔,螺纹杆602和限位 杆a603均贯穿于滑动座604上,使用时,按动触碰开关501控制伺服电机601正转,伺服电 机601转动带动两个滑动座604同时向内侧移动,从而使夹紧板7将物品夹紧。
42.其中,螺纹杆602上对称设有两端螺旋方向相反的外螺纹,且螺纹杆602的中间位置为 光轴,光轴上开设有一个环形槽,挂钩4上设有一个与环形槽相契合的连接环,挂钩4通过 连接环固定在螺纹杆602上,使用时,光轴上的环形槽方便挂钩4的安装,环形槽还起到了 挂钩4左右限位的效果,挂钩4方便对一些较大物品的运输,挂钩4还方便对夹紧板7不便 夹紧的物品运输。
43.其中,夹紧板7的底部对称开设有两个矩形槽,且矩形槽上滑动连接有一个u形结构的 支撑块,夹紧板7上安装有一组固定支撑块的螺栓,使用时,支撑块滑动连接在夹紧板7的 矩形槽上,从而使支撑块根据不同高度的物品进行调节。
44.其中,滑动座604上对称安装有两组刮除块9,且刮除块9上设有一个三角状凸起,三 角状凸起与螺纹杆602的螺纹相对正,使用时,在螺纹杆602转动过程中刮除块9会将粘附 在螺纹杆602上的灰尘刮除,从而使螺纹杆602转动时更流畅些。
45.本实施例的具体使用方式与作用:
46.使用时,首先将四个保护罩2分别卡接在连接套101,,而后将挂钩4安装到螺纹杆602 上,将夹紧机构6两个通过支撑座5安装到底板3上,根据不同高度的运输货物调节夹紧板 7上的支撑块高度,高度调节好后将支撑块通过螺栓固定在夹紧板7上,而后按动触碰开关 501控制伺服电机601正转,伺服电机601转动带动两个滑动座604同时向内侧移动,从而 使夹紧板7将物品夹紧,控制螺旋桨转动起飞,在无人机下降速度过快或者坠落时,夹紧板 7会在滑动座604内上下移动,从而使夹紧板7将物品夹紧时可以上下晃动,在物品运输过 程中复位弹簧对物品进行缓冲吸震,两个复位弹簧起到了夹紧板7不受重力的影响下能够自 动复位,在无人机下降后夹紧板7受重力影响会向上移动,从而使夹紧板7上的挤压杆挤压 触碰开关501,使得伺服电机601反转,夹紧板7向外侧移动,使得运输物品从夹紧板7之 间自动脱落,方便物品的卸载,在螺纹杆602转动过程中刮除块9会将粘附在螺纹杆602上 的灰尘刮除,从而使螺纹杆602转动时更流畅些,当运输货物不便通过夹紧板7夹紧时,将 货物捆绑安装到挂钩4上运输,挂钩4方便对一些较大物品的运输,挂钩4还方便对夹紧板 7不便夹紧的物品运输。
47.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于 所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述 实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本 发明从而设计适于特定用途的带有各种修改的各种实施例。