1.本实用新型涉及无人机技术领域,尤其是一种免接触送餐用的无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机;对于一些高校里,许多学生都喜欢通过网上平台进行叫餐,但现在一般宿舍楼均设门禁,因此送餐比较麻烦,且对于一些特殊情况,比如疫情期间,通常提倡减少人员接触,而送餐又难免接触,对此颇为麻烦。
3.有鉴于此,本发明人针对现有技术中的缺陷深入研究,遂得本案。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供一种免接触送餐用的无人机,它可以将餐盒等放置到放置台上,通过遥控控制无人机将餐盒等送到宿舍楼的阳台上,简单方便。
5.为了达到上述目的,本实用新型采用这样的技术方案:
6.一种免接触送餐用的无人机,包括机身,其特征在于,所述机身顶部表面至少设置有一个机翼,所述机身底部安装有放置台,所述放置台表面设置有至少一根立杆,所述立杆与立杆之间设置有保护盖并形成一个环形栏,所述放置台底部还设置有支撑脚。
7.优选地,所述机身底部安装有若干组电动推杆,该电动推杆的伸缩杆与放置台表面的立杆顶部固定连接。
8.优选地,所述保护盖为可拆卸结构,且保护盖两侧设置有倒扣钩。
9.优选地,所述立杆两侧均设置有与倒扣钩相对应的倒扣槽,所述保护盖通过倒扣钩扣入倒扣槽内进行限位连接。
10.优选地,所述立杆底端设置有螺纹头,所述立杆穿过放置台表面设置的槽口并通过螺纹头与螺纹盖进行螺纹限定连接。
11.优选地,所述支撑脚底部设置有减震座,该减震座包括支撑垫、缓冲杆、减震弹簧,所述支撑垫顶部与缓冲杆固定连接,所述减震弹簧环绕在缓冲杆表面。
12.优选地,所述机身顶部表面还设置有太阳能模块且与机身内部的驱动模块电连接。
13.通过采用上述技术方案,本实用新型的有益效果是:
14.本实用新型,为一种免接触送餐用的无人机,在使用时将餐盒等放置到放置台上,然后通过遥控器进行遥控即可,其中它可以通过通过电动推杆伸缩杆的伸出或缩进来控制放置台与机身底部之间的距离,从而可以根据餐盒的数量或者大小还控制之间的间距,再者保护盖与放置台均为可以拆卸结构,可以定时拆卸下来进行清洗或者餐饭不小心洒落时均可;另一方面支撑脚底部设置有减震座,可以起到减震作用,防止餐盒受震动洒落;该设计它可以将餐盒等放置到放置台上,通过遥控控制无人机将餐盒等送到宿舍楼的阳台上,简单方便。
附图说明
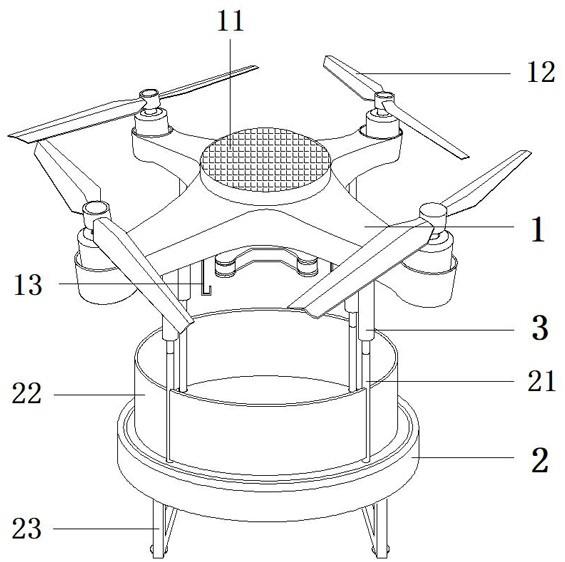
15.图1为本实用新型的无人机结构示意图;
16.图2为本实用新型的保护盖与立杆连接结构示意图;
17.图3为本实用新型的放置台与立杆连接结构示意图;
18.图4为本实用新型的a的放大结构示意图;
19.附图标记说明:
20.机身-1、放置台-2、电动推杆-3、太阳能模块-11、机翼-12、立杆-21、保护盖-22、支撑脚-23、倒扣槽-211、螺纹头-212、倒扣钩-221、减震座-231、支撑垫-2311、缓冲杆-2312、减震弹簧-2313。
具体实施方式
21.为使实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.一种免接触送餐用的无人机,包括机身1,其特征在于,机身1顶部表面至少设置有一个机翼12,机身1底部安装有放置台2,放置台2表面设置有至少一根立杆21,立杆21与立杆21之间设置有保护盖22并形成一个环形栏,放置台2底部还设置有支撑脚23。
23.进一步地,机身1底部安装有若干组电动推杆3,该电动推杆3的伸缩杆与放置台2表面的立杆21顶部固定连接;该技术可以通过电动推杆3伸缩杆的伸出或缩进来控制放置台2与机身1底部之间的距离,从而可以根据餐盒的数量或者大小还控制之间的间距;而电动推杆可采用铝合金直流电动推杆等,功率在20w到30w之间。
24.进一步地,保护盖22为可拆卸结构,且保护盖22两侧设置有倒扣钩221;该技术可以用来安装保护盖22,便于进行拆卸清洗。
25.进一步地,立杆21两侧均设置有与倒扣钩221相对应的倒扣槽211,保护盖22通过倒扣钩221扣入倒扣槽211内进行限位连接;该技术可以将保护盖22限定在立杆21之间,从而起到保护餐盒的作用,可以拆卸更换高度不同的保护盖22。
26.进一步地,立杆21底端设置有螺纹头212,立杆21穿过放置台2表面设置的槽口并通过螺纹头212与螺纹盖进行螺纹限定连接;该技术可以通过旋开螺纹盖,将放置台2取下,便于进行清洗。
27.进一步地,支撑脚23底部设置有减震座231,该减震座231包括支撑垫2311、缓冲杆2312、减震弹簧2313,支撑垫2311顶部与缓冲杆2312固定连接,减震弹簧2313环绕在缓冲杆2312表面;该技术可以通过缓冲杆2312、减震弹簧2313来进行缓冲减震,可以使无人机下落停止时防止餐盒受震动洒落。
28.进一步地,机身1顶部表面还设置有太阳能模块11且与机身1内部的驱动模块电连接;该技术可以通过光伏电池板吸收太阳光后,将太阳辐射能转换成直流电,并存入储能电池内,再通过光伏逆变器将电流转换成无人机可用的电能供无人机使用。
29.本实用新型的控制方式是通过控制器来自动控制,控制器的控制电路通过本领域
的技术人员简单编程即可实现,电源的提供也属于本领域的公知常识,并且本实用新型主要用来保护机械装置,所以本实用新型不再详细解释控制方式和电路连接。
30.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
技术特征:
1.一种免接触送餐用的无人机,包括机身(1),其特征在于,所述机身(1)顶部表面至少设置有一个机翼(12),所述机身(1)底部安装有放置台(2),所述放置台(2)表面设置有至少一根立杆(21),所述立杆(21)与立杆(21)之间设置有保护盖(22)并形成一个环形栏,所述放置台(2)底部还设置有支撑脚(23)。2.根据权利要求1所述的一种免接触送餐用的无人机,其特征在于,所述机身(1)底部安装有若干组电动推杆(3),该电动推杆(3)的伸缩杆与放置台(2)表面的立杆(21)顶部固定连接。3.根据权利要求1所述的一种免接触送餐用的无人机,其特征在于,所述保护盖(22)为可拆卸结构,且保护盖(22)两侧设置有倒扣钩(221)。4.根据权利要求3所述的一种免接触送餐用的无人机,其特征在于,所述立杆(21)两侧均设置有与倒扣钩(221)相对应的倒扣槽(211),所述保护盖(22)通过倒扣钩(221)扣入倒扣槽(211)内进行限位连接。5.根据权利要求1所述的一种免接触送餐用的无人机,其特征在于,所述立杆(21)底端设置有螺纹头(212),所述立杆(21)穿过放置台(2)表面设置的槽口并通过螺纹头(212)与螺纹盖进行螺纹限定连接。6.根据权利要求1所述的一种免接触送餐用的无人机,其特征在于,所述支撑脚(23)底部设置有减震座(231),该减震座(231)包括支撑垫(2311)、缓冲杆(2312)、减震弹簧(2313),所述支撑垫(2311)顶部与缓冲杆(2312)固定连接,所述减震弹簧(2313)环绕在缓冲杆(2312)表面。7.根据权利要求1所述的一种免接触送餐用的无人机,其特征在于,所述机身(1)顶部表面还设置有太阳能模块(11)且与机身(1)内部的驱动模块电连接。
技术总结
本实用新型提供一种免接触送餐用的无人机,包括机身,机身顶部表面至少设置有一个机翼,机身底部安装有放置台,放置台表面设置有至少一根立杆,立杆与立杆之间设置有保护盖并形成一个环形栏,放置台底部还设置有支撑脚;该结构新颖合理,它可以将餐盒等放置到放置台上,通过遥控控制无人机将餐盒等送到宿舍楼的阳台上,简单方便。简单方便。简单方便。
技术研发人员:吴声节
受保护的技术使用者:新疆智桨科技有限公司
技术研发日:2021.06.17
技术公布日:2022/1/7