1.本发明涉及多旋翼无人机技术领域,具体为多旋翼无人机大气污染物移动监测系统。
背景技术:
2.多旋翼无人机,是一种具有三个及以上旋翼轴的特殊的无人驾驶直升机,其通过每个轴上的电动机转动,带动旋翼,从而产生升推力,旋翼的总距固定,而不像一般直升机那样可变,通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制飞行器的运行轨迹。
3.现有的多旋翼无人机在对光缆和基站故障进行飞行检测时,只能对光缆和基站的表面损坏情况进行视觉检测,当光缆和基站外表面损坏时,无法检测此时的空气的温湿度和风力,无法确保损坏的光缆和基站是否会因为温湿度和风力影响,而导致漏电和掉落的情况发生,为此,我们提出多旋翼无人机大气污染物移动监测系统。
技术实现要素:
4.鉴于上述和/或现有多旋翼无人机大气污染物移动监测系统中存在的问题,提出了本发明。
5.因此,本发明的目的是提供多旋翼无人机大气污染物移动监测系统,通过多参数空气监测仪可拆卸安装在固定箱内部,温湿度气象传感器模组可拆卸安装在橡胶垫之间,使多参数空气监测仪与温湿度气象传感器模组的数据传输给单片机,单片机再通过4g/蓝牙/gprs将数据传输给移动终端,能够解决上述提出现有的问题。
6.为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
7.多旋翼无人机大气污染物移动监测系统,其包括:无人机,还包括可拆卸安装在无人机底端的固定装置,和可拆卸安装在固定装置内部的多参数空气监测仪,和可拆卸安装在无人机顶端后侧的限位装置,以及可拆卸安装在限位装置内部的温湿度气象传感器模组。
8.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述无人机两端设有底架。
9.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述固定装置包括套块,所述套块两端滑动连接卡板,所述卡板插接在无人机的内部底端,所述套块通过卡板安装在无人机的底端。
10.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述套块底端设有连接柱,所述连接柱底端设有固定箱。
11.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述固定箱底端右侧设有镂空槽,所述固定箱内部上下端设有活动块,所述活动块内部顶端连接弹簧,所述弹簧顶端连接在固定箱的内部。
12.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述镂空槽内部滑动连接多参数空气监测仪的输入端,所述固定箱内部放置多参数空气监测仪,所述固定箱内部通过活动块卡接多参数空气监测仪。
13.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述限位装置包括限位柱,所述限位柱底端两侧设有限位块,所述限位柱与限位块均插入无人机的内部。
14.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述限位柱顶端设有托板,所述托板内部两端滑动连接活动杆,所述活动杆外壁设有拉伸弹簧,所述拉伸弹簧一端连接活动杆的内壁,所述拉伸弹簧另一端连接托板的外壁,所述活动杆一端粘接橡胶垫,所述橡胶垫设置为两组。
15.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:两组所述橡胶垫之间接触温湿度气象传感器模组。
16.作为本发明所述的多旋翼无人机大气污染物移动监测系统的一种优选方案,其中:所述托板内部两端设有滑槽挡板,所述滑槽挡板内部滑动连接温湿度气象传感器模组的底端。
17.与现有技术相比:通过将活动块按压在固定箱的内部,再将多参数空气监测仪放入固定箱的内部,顺势将多参数空气监测仪的输入端滑入镂空槽的内部,此时放开活动块,在弹簧的作用下,使活动块恢复到初始位置,阻挡在多参数空气监测仪的前端,进而达到方便拆卸和安装多参数空气监测仪的效果;
18.当进行安装温湿度气象传感器模组时,拉开活动杆,将温湿度气象传感器模组的底端插入滑槽挡板的内部,此时放开活动杆,在拉伸弹簧的作用下,使两组活动杆带动两组橡胶垫对温湿度气象传感器模组进行挤压,进而对温湿度气象传感器模组进行限位,进而达到方便拆卸可安装温湿度气象传感器模组,且防止温湿度气象传感器模组掉落的效果;
19.通过将多参数空气监测仪与温湿度气象传感器模组连接单片机,使多参数空气监测仪与温湿度气象传感器模组的数据传输给单片机,单片机再通过4g/蓝牙/gprs将数据传输给移动终端,达到能够实时监测此时空气中的各项污染参数,进而达到方便人员对此时情况进行判定,是否对地面人员造成危险的效果。多参数空气监测仪可采集pm2.5、pm10、二氧化硫、一氧化碳、二氧化氮、臭氧vocs等大气污染物数据。
附图说明
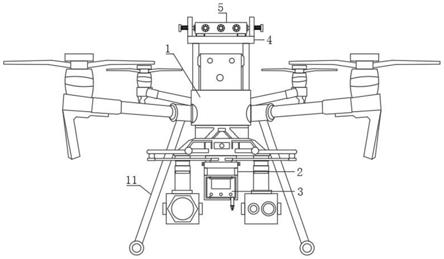
20.图1为本发明提供的整体结构示意图;
21.图2为本发明提供的限位装置连接结构示意图;
22.图3为本发明提供a区域的放大图;
23.图4为本发明提供的固定装置主视结构示意图;
24.图5为本发明提供的固定装置结构示意图;
25.图6为本发明提供的活动块连接结构示意图。
26.图中:无人机1、底架11、固定装置2、套块21、卡板22、连接柱23、固定箱24、镂空槽25、活动块26、弹簧27、多参数空气监测仪3、限位装置4、限位柱41、限位块411、托板42、活动杆43、拉伸弹簧44、橡胶垫45、滑槽挡板46、温湿度气象传感器模组5。
具体实施方式
27.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
28.本发明提供多旋翼无人机大气污染物移动监测系统,本发明达到能够实时监测此时空气中的各项污染参数,进而达到方便人员对此时的污染情况进行判定,是否对环境和公众造成危害的优点,请参阅图1-6,包括无人机1、固定装置2、多参数空气监测仪3、限位装置4和温湿度气象传感器模组5;
29.进一步的,无人机1底端可拆卸安装固定装置2,无人机1包括底架11,具体的,底架11设置在无人机1的两端,通过底架11设置在无人机1的两端,无人机可稳定放置于地面,方便在无人机1上安装多参数空气监测仪3和温湿度气象传感器模组5的效果。
30.进一步的,固定装置2可拆卸安装在无人机1底端,固定装置2包括套块21、卡板22、连接柱23、固定箱24、镂空槽25、活动块26和弹簧27,具体的,套块21两端滑动连接卡板22,卡板22插接在无人机1的内部底端,套块21通过卡板22安装在无人机1的底端,套块21底端设有连接柱23,连接柱23底端设有固定箱24,固定箱24底端右侧设有镂空槽25,固定箱24内部上下端设有活动块26,活动块26内部顶端连接弹簧27,弹簧27顶端连接在固定箱24的内部,镂空槽25内部滑动连接多参数空气监测仪3的输入端,固定箱24内部放置多参数空气监测仪3,固定箱24内部通过活动块26卡接多参数空气监测仪3,通过套块21两端滑动连接卡板22,当进行安装时,通过将无人机1的底端插入套块21的内部,再按压卡板22,使卡板22插入无人机1的内部底端两侧,从而对套块21进行连接和固定,进而达到方便拆卸和安装套块21的效果,通过套块21底端设有连接柱23,连接柱23底端设有固定箱24,起到连接的作用,通过固定箱24底端右侧设有镂空槽25,固定箱24内部上下端设有活动块26,活动块26内部顶端连接弹簧27,弹簧27顶端连接在固定箱24的内部,当进行安装多参数空气监测仪3时,将活动块26按压在固定箱24的内部,再将多参数空气监测仪3放入固定箱24的内部,顺势将多参数空气监测仪3的输入端滑入镂空槽25的内部,此时放开活动块26,在弹簧27的作用下,使活动块26恢复到初始位置,阻挡在多参数空气监测仪3的前端,进而达到方便拆卸和安装多参数空气监测仪3的效果。
31.进一步的,限位装置4可拆卸安装在无人机1的内部顶端,限位装置4包括限位柱41、限位块411、托板42、活动杆43、拉伸弹簧44、橡胶垫45和滑槽挡板46,具体的,限位柱41底端两侧设有限位块411,限位柱41与限位块411均插入无人机1的内部,限位柱41顶端设有托板42,托板42内部两端滑动连接活动杆43,活动杆43外壁设有拉伸弹簧44,拉伸弹簧44一端连接活动杆43的内壁,拉伸弹簧44另一端连接托板42的外壁,活动杆43一端粘接橡胶垫45,橡胶垫45之间接触温湿度气象传感器模组5,托板42内部两端设有滑槽挡板46,滑槽挡板46内部滑动连接温湿度气象传感器模组5的底端,通过限位柱41底端两侧设有限位块411,当进行安装限位装置4时,通过将限位柱41与限位块411均插入无人机1的内部,使限位柱41连接和固定在无人机1的顶端,进而达到可方便拆卸和安装限位装置4的效果,通过托板42内部两端设有滑槽挡板46,再通过托板42内部两端滑动连接活动杆43,活动杆43外壁设有拉伸弹簧44,活动杆43一端粘接橡胶垫45,当进行安装温湿度气象传感器模组5时,拉开活动杆43,将温湿度气象传感器模组5的底端插入滑槽挡板46的内部,此时放开活动杆43,由于拉伸弹簧44一端连接活动杆43的内壁,拉伸弹簧44另一端连接托板42的外壁,在拉
伸弹簧44的作用下,使两组活动杆43带动两组橡胶垫45对温湿度气象传感器模组5进行挤压,进而对温湿度气象传感器模组5进行限位,进而达到方便拆卸可安装温湿度气象传感器模组5,且防止温湿度气象传感器模组5掉落的效果,在橡胶垫45的作用下,对温湿度气象传感器模组5进行保护,防止温湿度气象传感器模组5受到挤压而损坏的效果。
32.进一步的,温湿度气象传感器模组5可拆卸安装在橡胶垫45之间,具体的,通过多参数空气监测仪3可拆卸安装在固定箱24内部,温湿度气象传感器模组5可拆卸安装在橡胶垫45之间,再将多参数空气监测仪3与温湿度气象传感器模组5连接单片机,使多参数空气监测仪3与温湿度气象传感器模组5的数据传输给单片机,单片机再通过4g/蓝牙/gprs将数据传输给移动终端,达到能够实时监测此时空气中的各项污染参数,进而达到方便人员对此时的污染情况进行判定,是否对环境和公众造成危害的效果,其中多参数空气监测仪3型号设置为rs485,温湿度气象传感器模组5型号设置为jxm。
33.在具体使用时,本领域技术人员将无人机1的底端插入套块21的内部,再按压卡板22,使卡板22插入无人机1的内部底端两侧,从而对套块21进行连接和固定,当进行安装多参数空气监测仪3时,将活动块26按压在固定箱24的内部,再将多参数空气监测仪3放入固定箱24的内部,顺势将多参数空气监测仪3的输入端滑入镂空槽25的内部,此时放开活动块26,在弹簧27的作用下,使活动块26恢复到初始位置,阻挡在多参数空气监测仪3的前端,进而对多参数空气监测仪3进行固定,当安装限位装置4时,通过将限位柱41与限位块411均插入无人机1的内部,使限位柱41连接和固定在无人机1的顶端,当进行安装温湿度气象传感器模组5时,拉开活动杆43,将温湿度气象传感器模组5的底端插入滑槽挡板46的内部,此时放开活动杆43,在拉伸弹簧44的作用下,使两组活动杆43带动两组橡胶垫45对温湿度气象传感器模组5进行挤压,进而对温湿度气象传感器模组5进行限位,防止温湿度气象传感器模组5掉落,再将多参数空气监测仪3与温湿度气象传感器模组5连接单片机,完成安装,在使用时,启动无人机1,使无人机1对光缆和基站进行实时检测,此时多参数空气监测仪3与温湿度气象传感器模组5的数据将传输给单片机,单片机再通过4g/蓝牙/gprs将数据传输给移动终端,使操作人员在地面接收数据,再根据大气的数据对光缆和基站的损坏情况进行分析。
34.虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。