1.本实用新型涉及摄像无人机技术领域,具体涉及一种实现高速摄像和远程传输的无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。从技术角度定义可以分为:无人固定翼机、无人垂直起降机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等,在民用无人机领域,无人机大量被用于摄像、拍照等。
3.高速相机拍摄的频率很高,进而拍出的照片或视频在慢速下可以观察快速运动的物体,但是现有一般都很重一般达到5kg以上,无法挂载到无人机上进行拍摄,随着科技进步的发展,国产富煌君达推出一款m220相机,其相机重量降低到1kg左右的重量,进而满足了现有的无人机的搭载条件,因此推出一款搭载高速相机的无人机很有必要。
4.但是,直接采用现有的无人机平台存在以下问题,首先是高速相机在高速采集回传时带宽要求为1000mbs级别才能够与地面实时传输,目前的尚无满足此带宽要求的无人机回传模块,其次现有无人机的电池固定安装于无人机机体上,不便于对电池进行更换,进而在执行拍摄任务时,电池电量消耗完毕后需要长时间充电方能再次执行拍摄任务,造成极大不便,且现有无人机在落地时通常为硬着陆,着陆时没有缓冲容易导致无人机上搭载的高速相机等设备被损坏;
5.因此需要一种解决上述问题的实现高速摄像和远程传输的无人机。
技术实现要素:
6.针对上述现有技术存在的问题,本实用新型提供了一种实现高速摄像和远程传输的无人机,当无人机空中飞行时,拍摄的图像利用1000mbs级无线网桥进行回传,当降落时,通过无人机上支撑腿下端的弧形金属片与地面接触后弯曲进而起到缓冲作用,且弧形金属片采用弹性金属材质,另外,由于弧形金属片的弧形结构,当无人机歪斜状态落地时,弧形金属片仍可起到缓冲作用。
7.为了实现上述目的,本实用新型采用的一种实现高速摄像和远程传输的无人机,包括:
8.设置与无人机下方的网桥:网桥通过电池输出的24v电源经由peo供电模块后输出作为其电源,高速相机与网桥通信连接,当无人机在空中飞行时,高速相机的信息与地面实时高速通信。
9.设置于无人机机体上的电池槽,所述电池槽中可拆卸的连接有电池,所述无人机机体的底部固定设置有支撑腿,所述支撑腿的下方设置有向外弯曲的弧形金属片,当无人机机体落地时,支撑腿下方的弧形金属片接触地面对无人机机体进行缓冲摆正。
10.作为上述方案的进一步优化,所述无人机机体的下方设置有高速相机,所述高速
相机的一侧设置有驱动高速相机转动而上下调节的直流伺服电机,所述直流伺服电机固定在无人机机体底部的门型架上,所述高速相机转动设置在门型架上。
11.本实施例中,通过遥控直流伺服电机转动可带动门型架上的高速相机上下转动,结合无人机机体自身可水平转动的特性,进而实现高速相机拍摄角度的调节,其中直流伺服电机可通过单独的无线收发模块进行遥控或与无人机的遥控系统整合,详细遥控控制方式属于现有技术。
12.作为上述方案的进一步优化,所述电池的一侧设置有卡槽,所述电池槽的一侧设置有卡合在卡槽中的卡片。
13.作为上述方案的进一步优化,所述无人机机体的一侧滑动嵌装有卡块,所述卡块中设置有动槽,所述卡块的尾端设置有卡块,所述卡块的端部与无人机机体之间连接,所述动槽中装有转动柱,所述转动柱偏离圆心部位上固定有转动杆,所述转动杆上端固定安装有旋钮。
14.当需要对电池进行更换时,通过转动旋钮,旋钮带动转动杆转动,转动杆带动转动柱转动,由于转动杆在偏心位置,故转动柱带动动槽进而带动卡块回缩,而解除对电池的限制,可将电池抠出,当需要装电池时,通过将电池放置到电池槽内,并使得卡槽落到卡片外,然后旋拧旋钮后松开,弹簧推动卡块落到电池上的一个对应的槽上,进而将电池锁定;进而解决了电池更换问题。
15.作为上述方案的进一步优化,所述支撑腿为四根向外倾斜的杆状结构,一组支撑腿的上端设置有网桥,所述高速相机与网桥之间通信连接。
16.其中,当无人机降落时,通过无人机上支撑腿下端的弧形金属片与地面接触后弯曲进而起到缓冲作用,且弧形金属片采用弹性金属材质,另外,由于弧形金属片的弧形结构,当无人机歪斜状态落地时,弧形金属片仍可起到缓冲作用。
17.本实用新型的一种实现高速摄像和远程传输的无人机,具备如下有益效果:
18.本实用新型的一种实现高速摄像和远程传输的无人机,包括设置于无人机机体上的电池槽,所述电池槽中可拆卸的连接有电池,所述无人机机体的底部固定设置有支撑腿,所述支撑腿的下方设置有向外弯曲的弧形金属片,当无人机机体落地时,支撑腿下方的弧形金属片接触地面对无人机机体进行缓冲摆正,当无人机降落时,通过无人机上支撑腿下端的弧形金属片与地面接触后弯曲进而起到缓冲作用,且弧形金属片采用弹性金属材质,另外,由于弧形金属片的弧形结构,当无人机歪斜状态落地时,弧形金属片仍可起到缓冲作用。
19.参照后文的说明与附图,详细公开了本实用新型的特定实施方式,指明了本实用新型的原理可以被采用的方式,应该理解,本实用新型的实施方式在范围上并不因而受到限制,在所附权利要求的精神和条款的范围内,本实用新型的实施方式包括许多改变、修改和等同。
附图说明
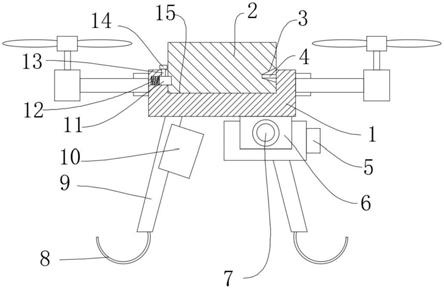
20.图1为本实用新型的结构示意图;
21.图2为本实用新型的卡块部位剖视图;
22.图3为本实用新型的正落地状态图;
23.图4为本实用新型的斜落地状态图。
24.图中:无人机机体1、电池2、卡槽3、卡片4、高速相机5、门型架6、直流伺服电机7、弧形金属片8、支撑腿9、网桥10、卡块11、弹簧12、转动杆13、旋钮14、电池槽15、转动柱16、动槽17。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚明了,下面通过附图中及实施例,对本实用新型进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限制本实用新型的范围。
26.需要说明的是,当元件被称为“设置于、设有”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件,当一个元件被认为是“连接、相连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,“固连”为固定连接的含义,固定连接的方式有很多种,不作为本文的保护范围,本文中所使用的术语“垂直的”“水平的”“左”“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
27.除非另有定义,本文所使用的所有技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同,本文中在说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在限制本实用新型,本文中所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合;
28.请参阅说明书附图1
‑
4,本实用新型提供一种技术方案:一种实现高速摄像和远程传输的无人机,包括:
29.设置于无人机机体1上的电池槽15,电池槽15中可拆卸的连接有电池2,无人机机体1的底部固定设置有支撑腿9,支撑腿9的下方设置有向外弯曲的弧形金属片8,当无人机机体1落地时,支撑腿9下方的弧形金属片8接触地面对无人机机体1进行缓冲摆正。
30.无人机机体1的下方设置有高速相机5,高速相机5的一侧设置有驱动高速相机5转动而上下调节的直流伺服电机7,直流伺服电机7固定在无人机机体1底部的门型架6上,高速相机5转动设置在门型架6上。
31.本实施例中,通过遥控直流伺服电机7转动可带动门型架6上的高速相机5上下转动,结合无人机机体1自身可水平转动的特性,进而实现高速相机5拍摄角度的调节,其中直流伺服电机7可通过单独的无线收发模块进行遥控或与无人机的遥控系统整合,详细遥控控制方式属于现有技术。
32.电池2的一侧设置有卡槽3,电池槽15的一侧设置有卡合在卡槽3中的卡片4。
33.需要说明的是,网桥10通过电池2输出的24v电源经由peo供电模块后输出作为其电源,高速相机5与网桥10通信连接,以回传相机拍摄的图片,同时对相机进行控制。
34.无人机机体1的一侧滑动嵌装有卡块11,卡块11中设置有动槽17,卡块11的尾端设置有卡块11,卡块11的端部与无人机机体1之间连接,动槽17中装有转动柱16,转动柱16偏离圆心部位上固定有转动杆13,转动杆13上端固定安装有旋钮14。
35.当需要对电池2进行更换时,通过转动旋钮14,旋钮14带动转动杆13转动,转动杆13带动转动柱16转动,由于转动杆13在偏心位置,故转动柱16带动动槽17进而带动卡块11回缩,而解除对电池2的限制,可将电池2抠出,当需要装电池2时,通过将电池2放置到电池
槽15内,并使得卡槽3落到卡片4外,然后旋拧旋钮14后松开,弹簧12推动卡块11落到电池2上的一个对应的槽上,进而将电池2锁定;进而解决了电池2更换问题。
36.支撑腿9为四根向外倾斜的杆状结构,一组支撑腿9的上端设置有网桥10,高速相机5与网桥10之间通信连接。
37.其中,当无人机降落时,通过无人机上支撑腿9下端的弧形金属片8与地面接触后弯曲进而起到缓冲作用,且弧形金属片8采用弹性金属材质,另外,由于弧形金属片8的弧形结构,当无人机歪斜状态落地时,弧形金属片8仍可起到缓冲作用。
38.仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。