1.本实用新型涉及无人机技术领域,具体涉及一种应用于无人机的新型蝴蝶刹结构装置。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。
3.现有的无人机的滑翔侧板上通常安装有蝴蝶刹,通过蝴蝶刹的偏转,从而实现无人机减速和降落。但是现有的蝴蝶刹结构通过是一体的,当蝴蝶刹出现故障或者损坏时,就需要将整个蝴蝶刹从无人机上拆卸下来,拆卸过程较为繁琐且拆卸的零件较多,不利于蝴蝶刹的快速维护。
技术实现要素:
4.针对现有技术的不足,本实用新型提供一种应用于无人机的新型蝴蝶刹结构装置,该设计方案具备方便维护且维护过程简单快捷的优点,解决了现有的装置维护不便且过程繁琐的问题。
5.本实用新型的一种应用于无人机的新型蝴蝶刹结构装置,包括无人机本体,所述无人机本体的两侧均设置有滑翔侧板,所述滑翔侧板的表面开设有安装槽,所述安装槽中设置有蝴蝶刹安装套,所述蝴蝶刹安装套的内腔中设置有蝴蝶刹板体;所述蝴蝶刹板体的顶部从左至右等距离开设有挤压槽,所述蝴蝶刹板体的底部从左至右等距离开设有若干组限位卡槽;所述蝴蝶刹安装套的内腔底部且与每组限位卡槽对应的位置处均开设有凹槽,每个所述凹槽中均固定有多个弹簧,多个所述弹簧的顶部之间固定有限位卡板,所述限位卡板的顶部一体成型有限位卡块。
6.作为本实用新型的进一步改进,所述蝴蝶刹板体的顶部且与每个挤压槽相对应的位置处均螺纹连接有螺杆,所述螺杆的底部通过轴承连接有按压块。
7.上述技术方案,通过设计的按压块,能够有效的推动蝴蝶刹板体下移,并通过螺杆给蝴蝶刹板体紧固力。
8.作为本实用新型的进一步改进,所述螺杆的顶部固定连接有拧块。
9.上述技术方案,起到方便拧动螺杆的效果。
10.作为本实用新型的进一步改进,所述按压块的大小与挤压槽的大小相适配。
11.上述技术方案,便按压块进入到挤压槽中。
12.作为本实用新型的进一步改进,每组所述限位卡槽均包括三个槽体,且槽体的大小与限位卡块的大小相适配,且所述限位卡块卡合在蝴蝶刹板体底部的限位卡槽中。
13.上述技术方案,通过限位卡块和限位卡槽,能够对蝴蝶刹板体紧固的更好,能够避免蝴蝶刹板体在蝴蝶刹安装套中活动。
14.作为本实用新型的进一步改进,所述蝴蝶刹板体的左右两侧均贴合在蝴蝶刹安装
套的内壁上。
15.上述技术方案,能够提升蝴蝶刹板体在蝴蝶刹安装套中的稳定性。
16.作为本实用新型的进一步改进,所述蝴蝶刹安装套远离蝴蝶刹板体的一侧与无人机本体内设的驱动结构连接在一起。
17.上述技术方案,能够驱动蝴蝶刹板体偏转。
18.与现有技术相比,本实用新型的有益效果如下:
19.本实用新型通过设计的蝴蝶刹安装套、蝴蝶刹板体、螺杆、按压块、弹簧、限位卡板和限位卡块等结构,能够有效的使得该设计方案具备结构简单,使用方便且条理清晰的特点,在使用时,能够通过拧动螺杆,从而快速的从蝴蝶刹安装套中取出蝴蝶刹板体,进而快速的实现蝴蝶刹板体的维护和更换的目的,而在安装新的蝴蝶刹板体后,又能够保证蝴蝶刹板体在蝴蝶刹安装套中的牢固性,能够保证蝴蝶刹板体的正常运行,保证了无人机本体的正常减速。
附图说明
20.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
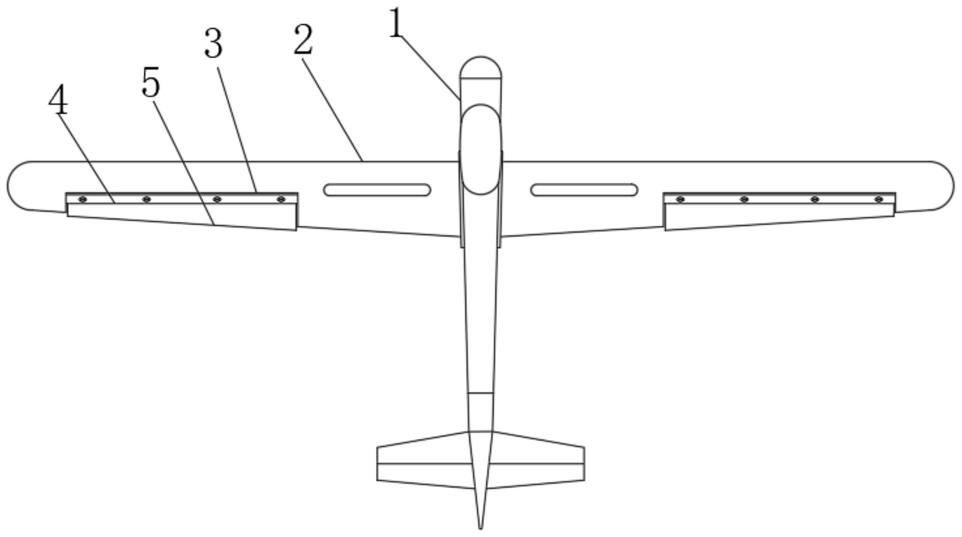
21.图1为本实用新型无人机本体的正视结构示意图;
22.图2为本实用新型蝴蝶刹安装套的侧视结构示意图;
23.图3为本实用新型蝴蝶刹安装套的局部放大结构示意图。
24.图中:1、无人机本体;2、滑翔侧板;3、安装槽;4、蝴蝶刹安装套;5、蝴蝶刹板体;501、挤压槽;502、限位卡槽;6、螺杆;7、拧块;8、按压块;9、凹槽;10、弹簧;11、限位卡板;12、限位卡块。
具体实施方式
25.以下将以图式揭露本实用新型的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本实用新型。也就是说,在本实用新型的部分实施方式中,这些实务上的细节是非必要的。此外,为简化图式起见,一些习知惯用的结构与组件在图式中将以简单的示意的方式绘示之。
26.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本实用新型,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
27.请参阅图1-3,本实用新型的一种应用于无人机的新型蝴蝶刹结构装置,包括无人机本体1,无人机本体1的两侧均设置有滑翔侧板2,滑翔侧板2的表面开设有安装槽3,安装槽3中设置有蝴蝶刹安装套4,蝴蝶刹安装套4的内腔中设置有蝴蝶刹板体5;蝴蝶刹板体5的顶部从左至右等距离开设有挤压槽501,蝴蝶刹板体5的底部从左至右等距离开设有若干组
限位卡槽502;蝴蝶刹安装套4的内腔底部且与每组限位卡槽502对应的位置处均开设有凹槽9,每个凹槽9中均固定有多个弹簧10,多个弹簧10的顶部之间固定有限位卡板11,限位卡板11的顶部一体成型有限位卡块12。
28.蝴蝶刹板体5的顶部且与每个挤压槽501相对应的位置处均螺纹连接有螺杆6,螺杆6的底部通过轴承连接有按压块8;通过设计的按压块8,能够有效的推动蝴蝶刹板体5下移,并通过螺杆6给蝴蝶刹板体5紧固力。
29.螺杆6的顶部固定连接有拧块7;起到方便拧动螺杆6的效果。
30.按压块8的大小与挤压槽501的大小相适配;方便按压块8进入到挤压槽501中。
31.每组限位卡槽502均包括三个槽体,且槽体的大小与限位卡块12的大小相适配,且限位卡块12卡合在蝴蝶刹板体5底部的限位卡槽502中;通过限位卡块12和限位卡槽502,能够对蝴蝶刹板体5紧固的更好,能够避免蝴蝶刹板体5在蝴蝶刹安装套4中活动。
32.蝴蝶刹板体5的左右两侧均贴合在蝴蝶刹安装套4的内壁上;能够提升蝴蝶刹板体5在蝴蝶刹安装套4中的稳定性。
33.蝴蝶刹安装套4远离蝴蝶刹板体5的一侧与无人机本体1内设的驱动结构连接在一起;能够驱动蝴蝶刹板体5偏转。
34.在使用本实用新型时(工作原理),需要更换蝴蝶刹板体5时,工作人员首先拿捏拧块7来拧松四根螺杆6,从而通过螺杆6带动按压块8从挤压槽501中退出,进而使蝴蝶刹板体5受到弹簧10的回复进行抬升,然后工作人员可拿住蝴蝶刹板体5,向外抽动便可轻松的从蝴蝶刹安装套4中取出蝴蝶刹板体5,而在安装新的蝴蝶刹板体5时,工作人员只需要将蝴蝶刹板体5插入蝴蝶刹安装套4中,使蝴蝶刹板体5底部的限位卡槽502与限位卡板11顶部的限位卡块12卡合在一起,然后依次拧紧四根螺杆6,通过螺杆6推动按压块8进入到挤压槽501中,并持续的给蝴蝶刹板体5向下的推力,最终使弹簧10压缩变短,使限位卡板11进入到凹槽9中,直到拧紧便完成了蝴蝶刹板体5的重新安装。
35.以上所述仅为本实用新型的实施方式而已,并不用于限制本实用新型。对于本领域技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原理在内所作的任何修改、等同替换、改进等,均应包括在本实用新型的权利要求范围之内。