1.本实用新型涉及无人机领域,更具体地说是一种可吸附式悬停的多旋翼无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。从技术角度定义可以分为:无人固定翼机、无人垂直起降机、无人飞艇、无人直升机、电动多旋翼无人机、无人伞翼机等。
3.随着电动多旋翼无人机在各行各业的广泛使用,电动多旋翼无人机技术越来成熟,应用场景也越来越多,为各行各业的发展做出了越来越多的贡献。但是电动多旋翼无人机滞空时间短一直是其进一步发挥其作用的短板,如何使其增加滞空时间,一直是人们探索的目标。
4.申请公告号为cn211494451u、申请公告日为2020年9月15日的中国专利,提供了一种可以吸附墙壁的无人机结构,包括无人机本体,所述无人机本体的外壁固定安装有支撑板,所述支撑板的两侧壁固定安装有安装板,所述安装板的底部固定安装有气筒,所述气筒的顶端连接气泵,且所述气筒内形成有负压腔,所述负压腔内设有弹簧,所述弹簧的下方设有导柱,且所述导柱内设有气孔,所述导柱的底端固定安装有密封垫,该实用新型通过安装板对气筒支撑,并对负压腔封装,即可通过弹簧对导柱进行弹性支撑,有效地提高无人机本体起降的稳定,降低地面冲击,同时由密封垫提高接触面的密封性能,从而由气泵在负压腔内产生负压,即可通过密封垫对墙壁及其他接触面进行吸附,提高无人机本体停放的稳定。该实用新型通过负压腔吸附式固定无人机,目的是起降的稳定性,未能有效增加无人机滞空时间。
技术实现要素:
5.1.实用新型要解决的技术问题
6.针对现有技术的无人机滞空时间短的问题,本实用新型设计了一种可吸附式悬停的多旋翼无人机,通过在机体的尾端增设电控永磁吸盘,需要悬停时,通过控制电流使电控永磁吸盘处于磁闭路状态,此时控制无人机尾部的吸盘接近并最终接触高处的钢铁构件表面,电控永磁吸盘吸附于高处的钢铁构件上悬停,此时无人机旋翼停止旋转,电控永磁吸盘停止供电,无人机不再为悬停消耗电能,可以提高了无人机的滞空时间。
7.2.技术方案
8.为达到上述目的,本实用新型提供的技术方案为:
9.一种可吸附式悬停的多旋翼无人机,包括机体以及对称式连接于机体两侧的旋翼,所述机体的尾端通过连杆连接有电控永磁吸盘,机体需要悬停时,通过控制电流使电控永磁吸盘处于磁闭路状态,此时控制无人机尾部的吸盘接近并最终接触高处的钢铁构件表面,电控永磁吸盘可吸附于高处的钢铁构件上悬停,此时无人机旋翼停止旋转,电控永磁吸盘停止供电,无人机不再为悬停消耗电能,进而提高了无人机的滞空时间并有效提高机体
首端安装的摄像头的连续工作时间,同时使摄像头的安装变的简单方便。电控永磁吸盘设置于机体尾端的目的是避开旋翼和首端安装的摄像头,避免旋翼触碰钢铁构件和影响摄像头工作。
10.进一步的技术方案,电控永磁吸盘的底端面连接有竖向的卸力杆,在钢铁构件上悬停时,机体首端不可避免的有下沉的趋势,形成一个机首向下的力矩,为减轻重量,电控永磁吸盘设计的较小,其与钢铁构件表面接触面小,其反力矩就小,悬停就会失败,因此,增设卸力杆后,机体首端下沉时,卸力杆可以紧抵在钢铁构件上,与吸盘一起形成足够大的反向力矩,将机体首端下沉的重力抵消式卸力,避免机体的整体跌落,而且,还能提高抵抗高处风力的作用。
11.进一步的技术方案,卸力杆成对设置,起到平衡式卸力的作用。
12.进一步的技术方案,卸力杆的底部横向连接有支腿,以提高抵紧力,并可以和无人机起落架协同,让机体的平稳落地。
13.进一步的技术方案,电控永磁吸盘处于磁通路状态后,机体吸附式悬停于钢铁构筑物的侧壁,尤其适用于船体上,因为一般的船体上大多以钢铁构件为主,方便机体的随时吸附式停靠。
14.进一步的技术方案,当需要无人机离开钢铁构筑物的侧壁时,通过控制电流使电控永磁吸盘处于磁开路状态,吸盘失去吸力,无人机离开侧壁,恢复可控飞行状态。
15.3.有益效果
16.采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
17.(1)本实用新型的一种可吸附式悬停的多旋翼无人机,需要悬停时,可控制电控永磁吸盘处于磁闭路状态,电控永磁吸盘吸附于高处的钢铁构件上悬停,进而提高了无人机的滞空时间并有效提高无人机上摄像头的工作时间,同时使摄像头的安装变的简单方便;
18.(2)本实用新型的一种可吸附式悬停的多旋翼无人机,增设卸力杆后,机体首端出现的下沉力矩,卸力杆通过紧抵在钢铁构件上并与吸盘一起形成反向力矩,将机体首端下沉的重力抵消式卸力,避免机体的整体跌落,而且,还能提高抵抗高处风力影响的作用;
19.(3)本实用新型的一种可吸附式悬停的多旋翼无人机,成对设置的卸力杆起到平衡式卸力的作用;
20.(4)本实用新型的一种可吸附式悬停的多旋翼无人机,增设支腿以提高抵紧力,并可以和无人机起落架协同,让机体的平稳起落;
21.(5)本实用新型的一种可吸附式悬停的多旋翼无人机,尤其适用于船体上,因为一般的船体上大多以钢铁构件为主,方便机体在船体上的随时吸附式停靠。
附图说明
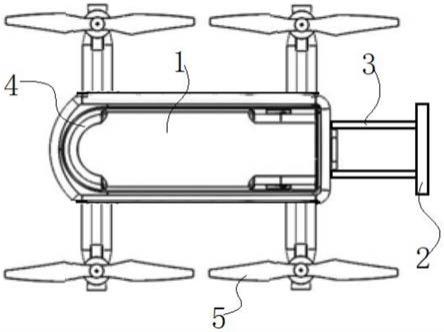
22.图1为本实用新型空载状态结构示意图;
23.图2为本实用新型工作状态结构示意图。
24.图中:1-机体;2-电控永磁吸盘;3-连杆;4-电池;5-旋翼;21-卸力杆;22-支腿。
具体实施方式
25.为进一步了解本实用新型的内容,结合附图对本实用新型作详细描述。
26.实施例1
27.本实施例的一种可吸附式悬停的多旋翼无人机,如图1所示,包括机体1以及对称式连接于机体1两侧的旋翼5,所述机体1的尾端通过连杆3连接有电控永磁吸盘2。
28.具体应用中,电控永磁吸盘2的磁路处于通或不通的状态可以可通过无人机遥控装置来实现,即遥控装置能够控制电控永磁吸盘2的磁路处于通或不通,实现吸盘加磁或脱磁,当机体1需要悬停时,通过控制电流使电控永磁吸盘处于磁闭路状态,此时控制无人机尾部的吸盘接近并最终接触高处的钢铁构件表面,同时,遥控装置控制旋翼5停止工作,无人机不再为悬停消耗电能,电控永磁吸盘2产生磁吸力,吸附于高处的钢铁构件上实现滞空式悬停,进而提高了无人机的滞空时间并有效提高机体1首端安装的摄像头的连续工作时间,同时使摄像头的安装变的简单方便。电控永磁吸盘设置于机体尾端的目的是为了避开两侧的旋翼5 和首端安装的摄像头,避免旋翼5触碰钢铁构件和影响摄像头工作,当需要运动时,通电控制电控永磁吸盘2处于磁断路状态,吸盘失去吸力,无人机离开钢铁构件,无人机刚下落的同时,遥控装置控制旋翼5工作,实现悬飞式运动。
29.实施例2
30.本实施例的一种可吸附式悬停的多旋翼无人机,基本结构同实施例1,不同和改进之处在于:如图2所示,在电控永磁吸盘2的底端面连接有竖向的卸力杆21,在钢铁构件上悬停时,机体1首端不可避免的有下沉的趋势,形成一个机首向下的力矩,为减轻重量,电控永磁吸盘设计的较小,其与钢铁构件表面接触面小,其反力矩就小,悬停就会失败,因此,增设卸力杆21后,机体1首端下沉时,卸力杆21可以紧抵在钢铁构件上,与吸盘一起形成足够大的反向力矩,将机体1首端下沉的重力抵消式卸力,避免机体1的整体跌落,而且,还能提高抵抗高处风力的作用。卸力杆21成对设置,比如图2中的两根卸力杆21,起到平衡式卸力的作用。在卸力杆21的底部横向连接有支腿22,以提高抵紧力,并可以和无人机起落架协同,让机体1的平稳落地。所述机体1内置电池4,所述电池4固定于远离卸力杆21 的机体1的首端,与卸力杆21相对设置,想到配重式平衡机体1的作用,让整个起落和悬飞过程更加平稳。
31.本实施例的可吸附式悬停的多旋翼无人机,尤其适用于船体上,因为一般的船体上大多以钢铁构件为主,方便机体在船体上的随时吸附式停靠。即:电控永磁吸盘2处于磁通路状态后,机体1可吸附式悬停于船体的任意钢铁构筑物侧壁。当需要无人机离开钢铁构筑物的侧壁时,通过控制电流使电控永磁吸盘处于磁开路状态,吸盘失去吸力,无人机离开侧壁,恢复可控飞行状态。
32.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。