1.本发明关于无人飞机、发射方法及程序。
背景技术:
2.现有已知有一种用来驱除害兽的无人飞机(例如,参照专利文献1)。专利文献1:日本特开2018
‑
68221号公报。发明所要解决的问题
3.现有的方法中,对于图像识别出来的害兽,无法瞄准特定部位。
技术实现要素:
4.本发明的第1实施方式中,提供一种无人飞机,具备:检测部,其对生物进行检测;瞄准部,其基于生物的检测结果来瞄准生物的特定部位;及,发射部,其将已容纳于容器中的内容物对特定部位发射。
5.无人飞机可具备记忆部,该记忆部记忆关于生物和内容物的数据。无人飞机可具备判断部,该判断部基于所记忆的数据来判断是否可发射内容物。
6.无人飞机可具备命中控制部,该命中控制部用来使发射部的命中预想位置对准特定部位。
7.无人飞机可具备方向变更装置,该方向变更装置与发射部连接。命中控制部,可控制方向变更装置来使发射部的命中预想位置对准特定部位。
8.无人飞机可具备喷嘴,该喷嘴设于发射部并发射内容物。无人飞机可具备方向变更装置,该方向变更装置与喷嘴连接。命中控制部,可控制方向变更装置来使发射部的命中预想位置对准特定部位。
9.无人飞机可具备第1摄影机,该第1摄影机用来检测生物。无人飞机可具备第2摄影机,该第2摄影机用来操作所述无人飞机。
10.无人飞机可具备复数个容器,这些复数个容器分别容纳不同的内容物。无人飞机可具备选择部,该选择部对应于生物的检测结果来选择要使用的内容物,并选择要发射内容物的容器。
11.选择部,可对应于生物对所发射的内容物的反应,来切换要对生物发射的内容物。
12.内容物可具有针对生物的忌避性能。
13.内容物可具有针对生物的引诱性能。
14.选择部,可在切换要对生物发射的内容物时,以提高性能的方式来切换。
15.内容物,可为用来对生物进行标记的标记材料。
16.发射部,可连接至气胶罐或加压槽的至少其中一者。
17.本发明的第2实施方式提供一种发射方法,其使用无人飞机来将内容物发射出去,该发射方法具备以下步骤:检测步骤,其对生物进行检测;瞄准步骤,其基于生物的检测结果来瞄准生物的特定部位;及,发射步骤,其将已容纳于容器中的内容物对特定部位发射。
18.发射方法可具备记忆步骤,该记忆步骤记忆关于生物和内容物的数据。发射方法可具备判断步骤,该判断步骤基于所记忆的数据来判断是否可发射内容物。
19.发射方法可具备对准步骤,该对准步骤使内容物的命中预想位置对准特定部位。
20.发射方法可具备选择步骤,该选择步骤从复数个内容物中选择与生物的检测结果对应的内容物。
21.选择步骤可具有以下步骤:对应于生物对所发射的内容物的反应,来切换要对生物发射的内容物。
22.选择步骤,可在切换要对生物发射的内容物时,以提高性能的方式来切换。
23.本发明的第3实施方式提供一种程序,该程序用于使计算机执行本发明的第2实施方式所述的发射方法。
24.此外,上述发明内容并未列举出本发明的全部特征。又,这些特征群的子组合也可成为发明。
附图说明
25.图1a表示无人飞机100的正面图的一例。图1b表示图1a的无人飞机100的左侧视图的一例。图2a是表示无人飞机100的正面图的另一例。图2b表示图2a的无人飞机100的左侧视图。图3表示容器保持部40的构成的一例。图4表示无人飞机100的操纵系统300的一例。图5a表示无人飞机100的功能区块图的一例。图5b是表示使用无人飞机100的内容物的发射方法的流程图。图6a是显示部210的显示画面214的一例。图6b是显示部210的显示画面216的一例。图7a表示操纵控制用的控制器230的一例。图7b表示发射控制用的控制器240的一例。图7c表示发射控制用的控制器240的一例。图7d表示操纵控制用和发射控制用的控制器250的一例。图8a表示对生物600发射内容物的手法的一例。图8b表示对生物600发射内容物的手法的一例。图8c表示对生物600发射内容物的手法的一例。图9a表示标记材料104的活用方法的一例。图9b表示标记材料104的活用方法的一例。图10a表示无人飞机100的正面图的一例。图10b表示图10a的无人飞机100的左侧视图的一例。图11表示无人飞机100中的发射装置500的一例。图12表示可将本发明的复数个实施方式的整体或一部分实现化的计算机2200 的例子。
具体实施方式
26.以下,通过发明的实施例来说明本发明,但以下的实施例并不对权利要求的发明加以限定。又,发明的解决手段中并不一定需要实施例中所说明的特征的全部组合。
27.图1a表示无人飞机100的正面图的一例。第1b图表示图1a的无人飞机100的左侧视图的一例。
28.无人飞机100,是在空中飞行的飞行体。本例的无人飞机100具备:本体部10、推进部20、可动摄影机30、容器保持部40及发射部50。此外,本说明书中是将本体部10中的设有固定摄影机12的面称作无人飞机100的正面,但飞行方向并不限定于正面方向。
29.本体部10,容纳有无人飞机100的各种控制电路和电源等。又,本体部 10,可作为连接无人飞机100的构成彼此的构造体来发挥功能。本例的本体部 10,连接至推进部20。本例的本体部10,具备固定摄影机12。
30.固定摄影机12,设于本体部10的侧面。固定摄影机12,对无人飞机100 的正面加以摄影。在一例中,由固定摄影机12拍摄下的影像被传送给利用者。无人飞机100的利用者,可基于由固定摄影机12所拍摄下的影像来操作无人飞机100。
31.推进部20,使无人飞机100推进。推进部20,具有旋转翼21和旋转驱动部22。本例的无人飞机100,具备4个推进部20。推进部20,经由腕部24 而被安装于本体部10。
32.推进部20,通过使旋转翼21旋转而获得推进力。旋转翼21,以本体部 10为中心而设置有4个,但旋转翼21的配置方法并不限于本例。旋转翼21,经由旋转驱动部22而设于腕部24的前端。
33.旋转驱动部22,具有马达等的动力源来驱动旋转翼21。旋转驱动部22,可具有旋转翼21的制动机构。旋转翼21和旋转驱动部22,也可省略腕部24而直接安装于本体部10。
34.腕部24,从本体部10以放射状的方式延伸设置。本例的无人飞机100,具备与4个推进部20对应设置的4个腕部24。腕部24,可为固定式也可为可动式。腕部24,可固定有摄影机等的其他构成。
35.可动摄影机30,对无人飞机100周围的影像加以摄影。本例的可动摄影机30,被设在本体部10的下方。在一例中,所谓下方,是指相对于本体部10,与设有旋转翼21的一侧相反的侧。可动摄影机30,与本体部10上所设置的固定摄影机12拍摄不同区域的影像。例如,可动摄影机30,为了控制从发射部50 的发射,而取得比固定摄影机12更狭窄的区域的影像。又,可动摄影机30,在固定摄影机12对行进方向实行摄影时,可对发射部50的发射方向的影像实行摄影。
36.本例的无人飞机100具备操纵用的固定摄影机12和发射控制用的可动摄影机30,由此使利用者的操作变得容易。也即,因为不需要切换操纵用的操作画面与发射控制用的操作画面,能够防止利用者的混乱。又,能够一边进行发射控制一边轻易地掌握无人飞机100的周围状况。
37.连接部32,连接本体部10与可动摄影机30。连接部32,可为固定式也可为可动式。连接部32,可为用来在3轴方向控制可动摄影机30的位置的平衡环架(gimbal)。连接部32,可配合发射部50的发射方向来控制可动摄影机30的朝向。
38.容器保持部40,保持后述的容器150,该容器150中填充有要发射的内容物。容器保持部40,经由方向变更装置52连接至本体部10。容器保持部40,也可连接至腕部24或脚部15
等的本体部10以外的构件。在一例中,容器保持部40,是收容容器150的筒状套筒。
39.容器保持部40的材料,只要是能够将收容容器150的收容部的形状加以保持的材料即可,并未特别加以限定。例如,容器保持部40的材料,包含铝等的金属、塑料或碳纤维等高强度且重量轻的材料。又,容器保持部40的材料并不限于硬质的材料,也可包含软质的材料,例如硅氧橡胶或聚胺基甲酸酯发泡体等的橡胶材料。此外,容器保持部40,也可具备用来对容器150进行加热或保温的加热机构。
40.方向变更装置52,连接本体部10与容器保持部40。方向变更装置52,可为用来在3轴方向控制容器保持部40的位置的平衡环架。在一例中,方向变更装置52通过移动容器保持部40的位置来调整发射部50的发射方向。此外,通过将方向变更装置52的规格加以统一,能够交换成可与容器150配合的任意的容器保持部40。由此,能够与尺寸或种类不同的容器150对应。
41.发射部50,与容器150连接并发射内容物。发射部50,具有发射口51 和喷嘴54。发射部50,将流入喷嘴54的内容物从发射口51发射出去。发射口 51的朝向,可对应于想要发射的方向来自由控制。
42.内容物可为液体、气体或固体中的任一者。内容物,也可为粉状、粒状或胶状等的状态。作为一例,内容物可具有针对生物的忌避性能而用来驱赶生物。内容物,可具有针对生物的引诱性能而用来吸引生物。内容物可为用来对生物进行标记的标记材料。内容物可含有辣椒素、柠檬水、盐水、山葵素(异硫氰酸丙烯酯)、氨水、硫醇、薄荷、蒜素、二烯丙基硫化物、姜(姜辣素)、乙醇等的刺激物质,也可含有温水或冷水,或者也可含有催泪瓦斯。生物可为猴子、山猪、熊、鹿、鸟、爬虫类(蜥蜴、蛇、鳄鱼)、两栖类等,但不限定于这些生物。关于内容物的具体使用方法将在之后描述。
43.容器150,是填充内容物的容器。在一例中,容器150,是将已填充于内部的内容物加以发射的气胶容器。气胶容器,通过已填充于内部的液化气体或压缩气体的气体压力来喷出内容物。本例的容器150是金属制的气胶罐,但也可为具有耐压性的塑料容器。容器150,以被容器保持部40加以收容的状态来被装载。
44.此外,作为喷射剂,可使用碳氢化合物(液化石油气)(lpg)、二甲醚 (dme)、氢氟烯烃(hfo
‑
1234ze)等的液化气体、二氧化碳(co2)、氮气(n2)、一氧化二氮(n2o)等的压缩气体。
45.脚部15,连接于本体部10,在着陆时保持无人飞机100的姿势。脚部 15,是姿势保持部的一例。姿势保持部,在停止旋转翼21的状态下保持无人飞机100的姿势。本例的无人飞机100,具有2只脚部15。复数只脚部15,能够分别延伸不同的长度,而在倾斜的或凹凸不平的面上也稳定保持无人飞机100 的姿势。又,无人飞机100,可在不对田地等的植物造成伤害的程度下充分延伸脚部15的长度。在脚部15上,也可安装有可动摄影机30或容器保持部40。
46.图2a是表示无人飞机100的正面图的另一例。图2b表示图2a的无人飞机100的左侧视图。本例的无人飞机100,与图1a和图1b的实施例不同的点在于具备复数个容器保持部40。本例中,针对与图1a和图1b的实施例不同的点特别加以说明。
47.复数个容器保持部40,分别具备容器150。复数个容器150,可收容同一种内容物,也可收容不同的内容物。本例的无人飞机100具备3个容器保持部 40,但不限定于这样的型
态。复数个容器保持部40,安装于脚部15上。复数个容器保持部40,可安装于相同的脚部15上,也可安装于不同的脚部15上。在本例中,有2个容器保持部40设在相同的脚部15上,且剩余的1个容器保持部 40设在另一支脚部15上。
48.发射部150,针对复数个容器150加以共通地设置。发射部150,也可针对复数个容器150个别地加以设置。在本例中,也可针对3个容器150设置3 个发射部50。本例的发射部50,通过方向变更装置52连接至本体部10。发射部50,可通过方向变更装置52来调整位置。本例的发射部50,通过从容器150 延伸设置的延伸部53来与容器150连接。
49.方向变更装置52,与发射部50连接。方向变更装置52,也与喷嘴54 连接,并通过控制发射部50的姿势来变更喷嘴54的方向。通过使方向变更装置 52与发射部50连接,容易对发射方向进行遥控。
50.延伸部53,设置成从容器保持部40的容器150延伸到发射部50。由此,延伸部53能够将发射部50配置在从容器保持部40分离的任意位置。据此,提高了无人飞机100的布局的自由度。延伸部53的个数可对应容器保持部40的个数来设置。本例的延伸部53是相对于3个容器保持部40各设置了1个。发射部 50,也可通过时间分割的方式从复数个容器150中选择任一者来加以发射,也可同时从复数个容器150加以发射。
51.图3表示容器保持部40的构成的一例。图3表示容器保持部40的剖面图。容器保持部40,对容器150加以保持。本例的容器保持部40具备:本体41、第1端盖部43及第2端盖部44。又,容器保持部40具备发射驱动部80,该发射驱动部80用来控制从容器150的发射。
52.本体41,对容器150加以保持。本体41,具有比容器150更大口径的圆筒状形状。本例的本体41,被第1端盖部43和第2端盖部44夹住。
53.第1端盖部43,覆盖本体41的其中一方的端部。本例的第1端盖部43,覆盖容器150的喷射侧的端部。第1端盖部43,相对于本体41以可经由螺纹部 45来拆装的方式螺入固定。本例的第1端盖部43,具有圆顶状的盖本体。第1 端盖部43,考虑到气动特性而以直径朝向前端逐渐缩小的方式被加以缩径。第1 端盖部43,其前端具有圆滑的圆锥状或圆顶状的曲面。通过做成这样气动特性良好的形状,能够减低横风的影响并达到飞行的稳定化。
54.第2端盖部44,在本体41中,覆盖第1端盖部43所覆盖的端部的另一方的端部。本例的第2端盖部44,覆盖容器150的喷射侧的相反侧的端部。第2 端盖部44,与本体41一体地构成。又,第2端盖部44,也可被设置成可从本体 41拆卸。
55.发射驱动部80,使内容物从容器150发射。发射驱动部80,其被容纳在位于容器150的底部侧的第2端盖部44。第2端盖部44,作为发射驱动部80 的框体来发挥功能。发射驱动部80具备:凸轮81、凸轮从动件82及可动板83。因为发射驱动部80设于容器保持部40中,所以在交换容器150时不需要交换发射驱动部80。
56.凸轮81,通过驱动源而被旋转驱动。在一例中,使用马达来作为驱动源。凸轮81,具有自旋转中心至外周为止的距离不同的构造。此外,在图示的例子中,凸轮81的形状被加以夸饰。凸轮81,在外周,与凸轮81从动件82接触。
57.凸轮从动件82,设于凸轮81与可动板83之间。凸轮从动件82,连接于凸轮81和可动板83,将凸轮81的旋转运动转换成直线运动并传达至可动板83。
58.可动板83,被设置为与容器150的底面相接,并控制容器150的阀口的开闭。可动板83,通过凸轮从动件82而前后移动。例如,当凸轮81的旋转中心与凸轮从动件82所抵接的凸
轮81的接触区域的距离较短时,可动板83相对容器150后退而使容器150的阀口关闭。另一方面,当凸轮81的旋转中心与凸轮从动件82所抵接的凸轮81的接触区域的距离较长时,可动板83相对容器150 前进而使容器150的阀口开启。
59.此外,发射驱动部80,虽然具有通过凸轮机构来将马达的旋转运动转换成直线运动的构成,但并不限定于凸轮机构。例如,发射驱动部80的机构,可具有螺旋进给机构、齿条
‑
齿轮(rack and pinion)等将马达的旋转运动转换成直线运动的机构。又,作为驱动源,可具备直线驱动用的线性马达或电磁螺线管 (electromagnetic solenoid)等而非旋转马达。
60.阀杆145,设于容器150上。通过利用致动器143来推压阀杆145,便可从容器150发射内容物。致动器143,具有与发射方向和发射型态对应的流路。在一例中,致动器143将内容物形成雾状来发射。
61.此外,本例中,容器150是直接装载于容器保持部40中,但也可通过收容构件来收容容器150,并将收容构件装载于容器保持部40中。收容构件在受到冲击时可保护容器150,因此提高遇到意外时的安全性。
62.本例的容器150,是气胶容器,因此即便容器150已空,只要装载上新的容器150便能够容易进行交换。又,内容物不易附着于人体上,因此交换时的安全性较高。
63.图4表示无人飞机100的操纵系统300的一例。本例的操纵系统300,具备无人飞机100和终端装置200。终端装置200,包含显示部210和控制器220。
64.显示部210,显示出无人飞机100所搭载的摄影机所拍摄下的影像。显示部210,可显示由固定摄影机12和可动摄影机30各自所拍摄下的影像。例如,显示部210,以分割画面来显示固定摄影机12和可动摄影机30的影像。显示部 210,可直接地与无人飞机100进行通讯,也可经由控制器220间接地与无人飞机100进行通讯。显示部210,也可与外部服务器连接。
65.控制器220,由利用者进行操作来操纵无人飞机100。控制器220,除了无人飞机100的飞行之外,可还指示通过发射部50进行内容物的发射。控制器 220,可通过有线或无线方式来与显示部210连接。也可设有复数个控制器220,以分别用于无人飞机100的操纵与发射部50的发射控制。
66.此外,本例的利用者,是使用终端装置200以手动的方式操纵无人飞机 100。然而,利用者也可并非手动而是通过程序自动操纵。又,利用者,也可不使用被显示在显示部210上的画面而直接目视操纵无人飞机100。又,也可将无人飞机100的操纵交给自动控制,并且以手动方式来操作发射部50的发射。
67.图5a表示无人飞机100的功能区块图的一例。无人飞机100具备:检测部35、选择部37、发射部50、瞄准部60、命中控制部70、判断部90及记忆部95。
68.检测部35,对生物加以检测。关于生物将在之后描述。在一例中,检测部35是固定摄影机12或可动摄影机30。可动摄影机30,是用来检测生物的第 1摄影机的一例。固定摄影机12,是用来操作无人飞机100的第2摄影机的一例。又,用来检测生物的第1摄影机也可为红外线摄影机。又,也可利用判断程序来处理摄影机的摄影图像数据,由此来检测生物,其中该判断程序是通过机械学习来进行。
69.选择部37,对应于生物的检测结果来选择要使用的内容物,并且选择要发射该内
容物的容器150。选择部37,可对应于生物对所发射的内容物的反应,来切换要对生物发射的内容物。选择部37,在切换要对生物发射的内容物时,可以以提高性能的方式来切换。所谓提高性能,作为一例是指选择内容物的浓度、效果、刺激度等更强的内容物。
70.瞄准部60,基于生物的检测结果来瞄准生物的特定部位。瞄准部60,取得检测部35所检测到的生物的图像。瞄准部60,对生物进行图像识别,并且从生物的部位瞄准预先决定的特定部位。例如,在移动的生物中,通过检测生物行进方向的端部来辨识出头部。
71.所谓生物的特定部位,是指要发射内容物并使内容物命中的对象的生物部位。所谓命中,是指自发射部50发射出去的内容物到达特定部位的情形。例如,生物的特定部位,是鼻子、眼睛、脚、躯干或是臀部等。生物的特定部位,可对应于发射的状况、生物的习性或内容物来选择。在一例中,无人飞机100,由于通过朝生物的臀部发射可使生物高机率向头部方向逃走,能够使远离的方向具有指向性,而能够安全地加以驱赶。又,无人飞机100,能够以生物的要害为目标来发射而实现更有效率的发射。
72.命中控制部70,使发射部50的命中预想位置对准生物的特定部位。例如,命中控制部70,控制方向变更装置52来使发射部50的命中预想位置对准特定部位。命中控制部70,也可对应于内容物的性质或风的影响等来控制发射部50的姿势。
73.记忆部95,记忆有关于生物和内容物的数据。例如,记忆部95,记忆有成为发射对象的生物的特征。记忆部95,也可记忆有发射许可信息,该发射许可信息表示是否正处于可发射内容物的区域。
74.判断部90,基于记忆部95中所记忆的数据来判断是否可发射内容物。例如,判断部90,基于所辨识出来的生物是否为发射对象、生物的特定部位是否已足够暴露出来等,来判断可否发射。判断部90,也可基于通过gps(全球卫星定位)而取得到的无人飞机100的位置信息,而基于是否正处于可发射内容物的地域来判断可否发射。
75.发射部50,对特定部位发射内容物。本例的发射部50,能够瞄准生物的特定部位并在适当的时间点进行发射。由此,可抑制不必要的发射。此外,无人飞机100的发射机构,只要是能够对特定部位发射内容物的机构即可,可为使用气胶罐的发射机构,也可为后述的使用槽体加压方式的发射机构。
76.图5b是表示使用无人飞机100的内容物的发射方法的流程图。本例的发射方法仅为一例,并不限定于此方法。
77.在步骤s100中,对生物加以检测。步骤s100,也可具有以具有引诱性能的内容物来诱出生物并对生物加以检测的阶段。例如,撒饵来诱出生物。
78.在步骤s102中,基于生物的检测结果来瞄准生物的特定部位。生物的特定部位,可基于预先记忆的数据来加以判断。
79.在步骤s104中,对特定部位发射内容物。在发射内容物后,也可还具备对应于生物的反应而发射不同内容物的阶段。
80.图6a是显示部210的显示画面214的一例。显示画面214,是显示固定摄影机12所拍摄到的无人飞机100的周围影像的操纵画面。显示画面214,显示无人飞机100的高度、水平方向的速度、垂直方向的速度及电池残量。中央位置212,表示显示画面214的中央,且对应于固定摄影机12的中央位置。
81.显示画面214,显示由固定摄影机12拍摄到的无人飞机100的行进方向。能够通过
显示画面214来掌握无人飞机100的周围状况。本例的显示画面214 中,有直升机也就是飞行体700入镜,操纵者便能够留意周围的接近物。无人飞机100,可基于入镜到显示部210中的影像来自动控制飞行路径,也可由利用者来手动操纵。
82.图6b是显示部210的显示画面216的一例。显示画面216,是使用了通过可动摄影机30来取得的影像的发射控制画面。显示画面216,显示发射部50 的发射方向的影像。本例的显示画面216,显示有发射对象也就是生物600。本例的可动摄影机30,将生物600a识别为山猪,并且将生物600b识别为猴子。
83.图7a表示操纵控制用的控制器230的一例。无人飞机100的飞行,是通过控制器230来遥控。控制器230具备:控制杆231、天线232、电源钮233、返回钮234及起飞钮235。
84.控制杆231,控制无人飞机100的飞行。本例的控制器230,具有2根控制杆也就是控制杆231a和控制杆231b。例如,控制杆231,用来控制无人飞机 100的升降、前后移动、旋转及左右移动。
85.天线232,用来与无人飞机100通讯。本例的控制器230,具备2根天线 232。天线232,也可用来与显示部210或外部计算机通讯。
86.电源钮233,是用来切换无人飞机100的电源开闭的按钮。返回钮234,是用来使无人飞机100归返至预先决定的起点位置的按钮。起飞钮235,是用来使无人飞机100开始起飞的按钮。这些按钮仅为一例,也可追加或省略功能。
87.图7b表示发射控制用的控制器240的一例。本例的控制器240,是发射控制用的控制器,而无人飞机100的操纵可通过其他控制器来加以操纵。控制器 230和控制器240可由2人分担来使用。又,可通过自动方式来进行无人飞机100 的操纵,并通过手动方式来进行发射控制。也可反过来通过手动方式来进行无人飞机100的操纵,并通过自动方式来进行发射控制。
88.控制器240具备:天线232、摄影机操作杆236、第1发射钮241、第2 发射钮242及第3发射钮243。发射钮的个数和功能并不限于本例。
89.摄影机操作杆236,控制无人飞机100所搭载的检测部35的摄影位置。例如,摄影机操作杆236,用来控制可动摄影机30的姿势以瞄准发射对象。
90.针对第1发射钮241~第3发射钮243,分别分配有不同的内容物。通过按下第1发射钮241,可发射水等的无害内容物。通过按下第2发射钮242,可发射用来标记的涂料材料。通过按下第3发射钮243,可发射辣椒素等的刺激物。
91.图7c表示发射控制用的控制器240的一例。控制器240具备:天线232、摄影机操作杆236、选择旋钮244及发射钮245。本例的控制器240,与图7b的差异点在于通过选择旋钮244来选择内容物。在本例中,对与图7b不同之处特别加以说明。
92.选择旋钮244,选择要从发射部50发射的内容物。本例的选择旋钮244,选择水、涂料或辣椒素来作为内容物。又,选择旋钮233,能够选择保险状态。在保险状态中,对于从发射部50的发射加以禁止,以避免内容物的误射。发射的禁止,可为通过电子式控制来禁止发射的软式锁止,也可为通过机械式控制来禁止发射的硬式锁止。
93.发射钮245,是发射控制用的按钮。通过按下发射钮245,将选择旋钮 244所选择的内容物发射出去。一旦放开发射钮245,内容物的发射便停止。
94.图7d表示操纵控制用和发射控制用的控制器250的一例。本例的控制器250具备:
控制杆231、天线232、摄影机操作杆236、第1发射钮241、第2 发射钮242及第3发射钮243。本例的控制器250,兼具操纵控制和发射控制双方的控制器功能,而能够以一人来进行操纵。
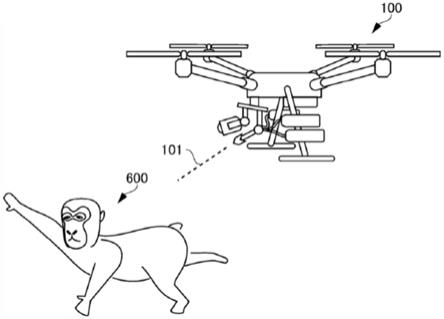
95.图8a表示对生物600发射内容物的手法的一例。本例的无人飞机100,正在对生物600发射内容物101。无人飞机100,正在对生物600发射作为内容物101的水。如此,即便是无害的内容物,也能够惊吓生物600而加以驱赶。若使用无害的内容物,误射时的安全性较高。
96.图8b表示对生物600发射内容物的手法的一例。图8b表示在图8a所示的例子之后,生物600已习惯内容物101的发射而无法再加以驱赶的状况。如此,生物600有可能会学习到内容物101是无害的。在此情况下,选择部37,可选择忌避性能更高的内容物。
97.图8c表示对生物600发射内容物的手法的一例。图8c表示在图8b所示的例子之后,选择其他内容物来驱赶生物600的状况。本例的生物600虽然已学习到内容物101是无害的,但被发射了刺激性比内容物101更强的内容物103 而逃走。
98.本例的无人飞机100,首先发射安全的内容物101,由此能够避免因误射造成的被害。另一方面,当生物600经过学习而使得内容物101失去效用时,能够选择不同的内容物103来加以发射。如此,无人飞机100,能够实现安全且有效地发射。
99.又,无人飞机100,也可发射具有引诱性能的内容物来诱出生物600,然后发射标记材料或是具有忌避性能的内容物。通过诱出生物600,可提高对生物 600的命中率。
100.图9a表示标记材料104的活用方法的一例。本例中,对狩猎对象也就是生物600发射标记材料104。
101.标记材料104,在一例中是用来对生物600进行着色的荧光涂料。标记材料104,可为使生物600留下脚印的材料,也可为附加上气味的材料。例如,若利用标记材料将生物600着色,猎人800即便在夜间也能容易发现生物600。在本例中,是在生物600的躯干上附着有标记材料104。
102.图9b表示标记材料104的活用方法的一例。在本例中,通过对生物 600进行标记,能够从过去的发射数据来对捕获到的生物600加以辨识,而对捕获到的生物600进行认证。例如,无人飞机100,预先记忆下对生物600进行标记的内容物的内容、发射的地域或发射的时间等的内容。捕获生物600后,通过从数据库对涂布于生物600上的标记材料104进行检索,能够取得生物600的生态、出没位置等的信息。
103.图10a表示无人飞机100的正面图的一例。图10b表示图10a的无人飞机100的左侧视图的一例。本例的无人飞机100,具备支持骨架42和发射装置500。
104.支持骨架42,连接本体部10与发射装置500。支持骨架42可为固定式也可为可动式。支持骨架42,可为用来在3轴方向控制发射装置500的位置的平衡环架。在一例中,支持骨架42,可通过移动发射装置500的位置来控制发射装置500的发射方向。支持骨架42,可如图10a和图10b所示连接发射装置500的保持容器510(后述)与脚部15,也可连接发射装置500的其他部分与无人飞机100的其他部分。又,如图1a和图1b所示,除了通过支持骨架42来将发射装置500的保持容器510与无人飞机100的脚部15连接,也可还将发射装置500的加压部520(后述)直接安装于脚部15。又,也可将支持骨架42固定,且将发射装置500的发射部50做成可动式,由此调整发射装置500的发射方向。
105.图11表示无人飞机100中的发射装置500的一例。
106.发射装置500具备:发射部50、保持容器510、加压部520、内压检测部540及控制部
550。保持容器510,通过第1连接部522而与加压部520连接,并通过第2连接部532而与发射部50连接。第1连接部522,在保持容器 510与加压部520之间具有第1切换部524,第2连接部532,在保持容器510 与发射部50之间具有第2切换部534。第1切换部524和第2切换部534,例如是电磁阀。第1切换部524、第2切换部534及内压检测部540,经由导线等的控制线而电性连接至控制部550。
107.保持容器510,保持要用来从发射装置500发射出去的内容物。保持容器510,是加压槽体的一例。保持容器510,例如由金属或纤维强化塑料等的复合材料所制成,具有受到加压部520的加压也不会破损的耐压性。保持容器 510,具有用来补充内容物的保持容器注入口517,以及用来关闭保持容器注入口517的保持容器盖518。
108.加压部520,从气胶容器将填充物喷射至保持容器510的内部,以对保持容器510进行加压。加压部520,可通过与图3所示的容器保持部40相同的原理来驱动。
109.由加压部520所喷射出的填充物,通过第1连接部522而被供给到保持容器510的内部,以对保持容器510进行加压。通过该加压使得保持容器 510的内容物被推出,并通过第2连接部532而自发射部50被发射到外部。
110.第1切换部524,通过对应于来自控制部550的电子信号进行开闭,来切换是否要使保持容器510与加压部520连通。
111.同样地,第2切换部534,藉由对应于来自控制部550的电子信号进行开闭,来切换是否要使保持容器510与发射部50连通。
112.内压检测部540,检测保持容器510的内压,并将检测到的保持容器510 的内压输出到控制部550。
113.控制部550,可对应于内压检测部540的检测结果来控制第1切换部524 的动作。例如,当保持容器510的内容物的残量减少,而使保持容器510的内压降到比预先决定的下限临限值更低时,控制部550可打开第1切换部524来使保持容器510与加压部520连通,并由加压部520进行加压。此外,此处的加压部 520为了对保持容器510进行加压而喷射填充物的动作,可在打开第1切换部524 之前进行,也可在打开第1切换部524之后进行。并且,当通过加压部520进行加压而使保持容器510的内压升到比预先决定的上限临限值更高时,控制部550 可关闭第1切换部524而停止加压部520的加压。
114.当需要从发射部50发射保持容器510的内容物时,控制部550可打开第 2切换部534而使保持容器510与发射部50连通,并从发射部50进行发射。此时,若保持容器510的内压足够高,便可从发射部50将保持容器510的内容物发射出去。
115.保持容器510与第1连接部522的连接位置可被设在比保持容器510与第2连接部532的连接位置更上方侧。在图11所示的例子中,第1连接部522 被设在保持容器510的上面。由此,第1连接部522不会碰到保持容器510的内容物,而能够防止第1连接部522被内容物污染。
116.图12表示可将本发明的复数个实施方式的整体或一部分实现化的计算机2200的例子。计算机2200中所安装的程序,能够使计算机2200作为与本发明的实施例的装置附加上关联性的操作、或该装置的一或复数个区段来发挥功能,或是能够执行该操作、或该装置的一或复数个区段,及/或能够使计算机2200 执行本实施例的作业流程或该作业流程的阶段。这样的程序,可通过cpu 2212 来执行,以使计算机2200执行与本说明书中所述的流程
图及区块图的其中几个区块或全部区块附加上关联性的特定操作。
117.根据本实施例的计算机2200,包含cpu 2212、ram 2214、图形控制器 2216及显示器件2218,这些构件通过主机控制器2210来相互连接。计算机2200 还包含如通讯接口2222、硬盘驱动器2224、dvd
‑
rom驱动器2226及ic卡驱动器的输入出单元,这些构件经由输入出控制器2220而连接至主机控制器2210。计算机还包含如rom 2230及键盘2242这样的传统输入出单元,这些构件经由输入出芯片2240而连接至输入出控制器2220。
118.cpu 2212,遵照被储存于rom 2230及ram 2214内的程序来运作,并由此控制各单元。图形控制器2216,取得被提供于ram 2214内的讯框缓冲区或是在其中通过cpu 2212所产生的映像数据,并使映像数据被显示于显示器件 2218上。
119.通讯接口2222,经由网络来与其他电子元件通讯。硬盘驱动器2224,储存有要通过计算机2200内的cpu 2212来使用的程序及数据。dvd
‑
rom驱动器2226,从dvd
‑
rom 2201读取程序或数据,并经由ram 2214将程序或数据提供至硬盘驱动器2224。ic卡驱动器,从ic卡读取程序及数据,并且/或是将程序及数据写入至ic卡中。
120.rom 2230,在其中储存有起动时要通过计算机2200执行的开机程序等、及/或依存于计算机2200的硬件的程序。输入出芯片2240,也可经由并行端口、串行端口、键盘端口、鼠标端口等来将各种输入出单元连接至输入出控制器2220。
121.程序,通过dvd
‑
rom 2201或是ic卡之类的计算机可读取媒体来加以提供。程序,被从计算机可读取媒体读取出来,且被安装至也可作为计算机可读取媒体的例子的硬盘驱动器2224、ram 2214或是rom2230中,并通过 cpu 2212来执行。撰写于该等程序内的信息处理,由计算机2200读取出来而造就程序与上述各种类型的硬件资源之间的合作。装置或方法,可通过计算机2200 的使用而实现信息的操作或处理来加以构成。
122.例如,在计算机2200和外部元件之间执行通讯的情况中,cpu 2212 可执行被读取至ram 2214中的通讯程序,并基于被撰写于通讯程序中的处理,对通讯接口2222下达通讯处理的指令。通讯接口2222,在cpu 2212的控制下,读取被储存于传送缓冲处理区域中的传送数据并将读取到的传送数据传送至网络、或是将自网络接收到的接收数据写入至接收缓冲处理区域等,其中传送缓冲处理区域及接收缓冲处理区域被提供在如ram 2214、硬盘驱动器2224、 dvd
‑
rom 2201或ic卡的记录媒体上。
123.又,cpu 2212,可将被储存于如硬盘驱动器2224、dvd
‑
rom驱动器2226(dvd
‑
rom 2201)、ic卡等的外部记录媒体中的档案或数据库的整体或必要部分读取至ram 2214中,并对ram 2214上的数据执行各种类型的处理。 cpu 2212,接着将已处理过的数据写回外部记录媒体。
124.各种类型的程序、数据、表格及数据库这样的各种类型的信息,可被储存于记录媒体中并接受信息处理。cpu 2212,针对从ram 2214读取出的数据,可执行本公开的各处记载的各种类型的处理,并将结果写回ram 2214,上述处理包含通过程序的指令序列所指定的各种类型的操作、信息处理、条件判断、条件分歧、无条件分歧、信息的搜寻/置换等。又,cpu 2212,可搜寻记录媒体内的档案、数据库等中的信息。例如,在记录媒体内储存有复数个条目 (entry),且这些条目具有分别与第2属性的属性值附加上关联性的第1属性的属性值的情况中,cpu 2212,可从这些复数个条目中搜寻与被指定的第1属性的属性值条件一致的条目,并读取被储存于该条目内的第2属性的属性值,由此来取得与满足预定条件的第1属性
附加上关联性的第2属性的属性值。
125.上面已说明过的程序或软件模块,可被储存于计算机2200上或是计算机2200附近的计算机可读取媒体中。又,连接至专用通讯网络或因特网的服务器系统中所提供的硬盘或ram之类的记录媒体,可作为计算机可读取媒体而使用,并由此经由网络将程序提供至计算机2200。
126.以上使用实施例说明了本发明,但本发明的保护范围并不限定于上述实施例中所记载的范围。本案所属技术领域中具有通常知识者能够明确理解到,可对上述实施例施加多种变更或改良。从权利要求能够明确理解到,施加过这样的变更或改良的型态也被包含于本发明的保护范围中。
127.应注意到,权利要求、说明书及附图中表示的装置、系统、程序及方法中的动作、手法、步骤及阶段等的各处理的执行顺序,只要没有特别明确表示“在
…
之前”、“先加以”等,并且并未将先前处理的输出用在后续处理,便能够以任意顺序来实现。关于权利要求、说明书及附图中的动作流程,即便为了方便而使用“首先”、“接着”等来加以说明,也并非意味着一定要以该顺序来实施。附图标记说明
128.10:本体部、12:固定摄影机、15:脚部、20:推进部、21:旋转翼、22:旋转驱动部、24:腕部、30:可动摄影机、32:连接部、35:检测部、37:选择部、40:容器保持部、41:本体、42:支持骨架、43:第1端盖部、44:第2端盖部、45:螺纹部、 50:发射部、51:发射口、52:方向变更装置、53:延伸部、54:喷嘴、60:瞄准部、70: 命中控制部、80:发射驱动部、81:凸轮、82:凸轮从动件、83:可动板、90:判断部、 95:记忆部、100:无人飞机、101:内容物、103:内容物、104:标记材料、143:致动器、145:阀杆、150:容器、200:终端装置、210:显示部、212:中央位置、214:显示画面、216:显示画面、220:控制器、230:控制器、231a:控制杆、231b:控制杆、232: 天线、233:电源钮、234:返回钮、235:起飞钮、236:摄影机操作杆、240:控制器、 241:第1发射钮、242:第2发射钮、243:第3发射钮、244:选择旋钮、245:发射钮、 250:控制器、300:操纵系统、500:发射装置、510:保持容器、517:保持容器注入口、 518:保持容器盖、520:加压部、522:第1连接部、524:第1切换部、532:第2连接部、534:第2切换部、540:内压检测部、550:控制部、600:生物、600a:生物、600b: 生物、700:飞行体、800:猎人、2200:计算机、2201:rom、2210:主机控制器、 2212:cpu、2214:ram、2216:图形控制器、2218:显示器件、2220:输入出控制器、 2222:通讯接口、2224:硬盘驱动器、2226:rom驱动器、2230:rom、2240:输入出芯片、2242:键盘