1.本技术属于航空装配技术领域,尤其涉及一种飞机移载限位装置及方法。
背景技术:
2.飞机在进入总装厂房进行脉动化装配时,每个站位均有相对应的工作内容,当前站位内工作全部完成后需操纵千斤顶降下飞机,并通过牵引设备将飞机移载到下一站位继续进行装配作业,每个站位均设有配套的机翼、机身及尾翼工作平台,对于飞机停靠区域有严格的位置要求,特别是脉动化装配现场尾部工作梯配套的水平尾翼对接平台对于飞机的前后位置和顶升高度有着严格的数据要求。现场环境相对复杂,在飞机移载过程中,指挥人员不仅需要观察飞机与周围可能存在的磕碰风险,指挥现场警戒人员和设备操作人员,还需要观察主起落架两侧机轮的相对位置,对于飞机实时位置无法持续监控,存在飞机移载过度与工作平台发生磕碰的风险。
技术实现要素:
3.为了解决现有技术中飞机移载限位过程中存在的问题,本技术提供一种飞机移载限位装置及方法。所述技术方案如下:
4.第一方面,本技术提供一种飞机移载限位装置,所述装置包括:机械卡扣、第一壳形件、第二壳形件和地面磁线,
5.所述机械卡扣为钢件柱状空壳结构,两侧开有直角槽口,槽口用于插入轮毂中轴两侧六角头保险螺栓,机械卡扣的前端与第一壳形件固定连接,连接处可拆卸;
6.第一壳形件包括可调开关、微型电机、角运动检测部件和控制器,可调开关设置在壳形件的上部,第一壳形件的末端与机械卡扣固定连接,壳形件的前端与壳形件活动连接,可调开关与控制器电连接;
7.第二壳形件包括齿轮传动轴、磁感应器、高度测量器、声光报警器和语音播报器,声光报警器设置在第二壳形件的前端,第二壳形件的末端与第一壳形件活动相连,齿轮传动轴穿过第二壳形件的末端与第一壳形件,语音播报器分别与高度测量器、第一壳形件中的控制器电连接,声光报警器分别与高度测量器、第一壳形件中的控制器电连接,磁感应器位于第二壳形件的底端,磁感应器与控制器电连接,角运动检测部件与微型电机电连接,角运动检测部件通过微型电机控制齿轮传动轴轴向转动第二壳形件;
8.地面磁线粘贴在当前飞机所属机型对应的停靠区域,地面磁线位于磁感应器的探测范围内。
9.可选地,所述角运动检测部件为陀螺仪。
10.可选地,第一壳形件和第二壳形件通过滚珠轴承活动连接,齿轮传动轴穿过滚珠轴承,控制第二壳形件转动。
11.可选地,控制器为plc检测处理模块。
12.可选地,可调开关对应m个档位,所述m个档位包括n个机型档位和1个关闭档位,所
述m为大于1的整数,n=m-1。
13.可选地,高度测量器为红外测量器。
14.可选地,语音播报器为蓝牙语音播报器。
15.第二方面,本技术提供一种飞机移载限位方法,用于飞机移载限位装置,所述装置包括:机械卡扣、壳形件、壳形件和地面磁线,所述机械卡扣为钢件柱状空壳结构,两侧开有直角槽口,机械卡扣的前端与壳形件固定连接,连接处可拆卸;壳形件包括可调开关、微型电机、角运动检测部件和控制器,壳形件包括齿轮传动轴、磁感应器、高度测量器、语音播报器和声光报警器。
16.所述方法包括:
17.机翼主千斤顶及尾千斤顶同时降下,飞机起落架三点着陆,在主起落架外侧前机轮轮毂中轴处安装飞机移载限位装置,所述安装过程包:将装置尾部的机械卡扣的直角槽口的开口处对准轮毂中轴两侧六角头保险螺栓,使轮毂中轴两侧六角头保险螺栓插入至直角槽口底部至飞机移载限位装置无法转动,依靠重力作用将飞机移载限位装置在轮毂内卡死,角运动检测部件将第一夹角补偿信号传递至微型电机,微型电机驱动齿轮传动轴转动壳形件以控制磁感应器的探测面平行于地面,将可调开关调至当前飞机所属机型的档位,当飞机牵引设备将前起落架机轮抱起时,机头上扬,机身呈后倾趋势,角运动检测部件将第二夹角补偿信号传递至微型电机,微型电机驱动齿轮传动轴转动壳形件以控制磁感应器的探测面再次平行于地面,执行飞机的移载操作;
18.在当前飞机所属机型对应的停靠区域粘贴地面磁线,根据可调开关的机型档位,控制器在检测到磁感应器接收到地面磁线发送的磁感应信号时,控制语音播报器发出提示信号,所述提示信号用于通知指挥员及牵引设备操作员飞机已进入停靠区域,注意减速观察;控制器在未检测到磁感应器接收到地面磁线发送的磁感应信号时,确定机轮超出地面磁线的粘贴范围,并控制声光报警器发出告警信号,所述告警信号用于通知现场所有人员飞机已到位,停止移载,完成飞机的就位操作;
19.将飞机顶起至工作平台高度,主千斤顶和尾部千斤顶同时工作,高度测量器测量飞机离地高度并通过语音播报器将飞机离地高度实时提示给现场指挥者,高度测量器在测量到飞机离地高度达到预设高度时,控制声光报警器发出声光报警信号,飞机顶升结束。
20.可选地,高度测量器和语音播报器之间的连接方式为蓝牙连接。
21.本技术的有益效果是:1、能避免生产现场指挥人员因视线受阻,导致飞机移载过度,与周围发生磕碰风险的问题;2、当飞机进入停靠区域时,声光报警装置能够迅速提醒指挥者及现场人员飞机移载到位,避免了移载机体超出停靠位置的问题;3、当飞机移载到位进行顶升时,蓝牙语音播报装置能够实时传输飞机顶升高度信息,避免了飞机顶升过高;4、该装置安装简单,使用便捷,可用于各类机型。
附图说明
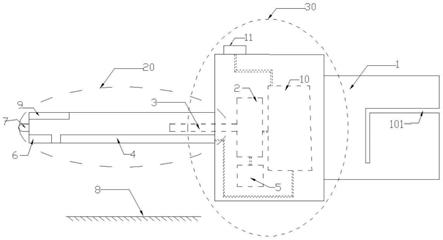
22.图1为本技术提供的一种飞机移载限位装置的剖视图;
23.图2为本技术提供的一种飞机移载限位装置的立体图;
24.图3为本技术提供的一种飞机移载限位装置工作侧视图;
25.图4为本技术提供的一种飞机移载限位装置工作俯视图。
具体实施方式
26.下面通过具体的实施方式连接附图对本技术作进一步详细说明。
27.本技术提供一种飞机移载限位装置,如图1所示,所述装置包括:机械卡扣1、第一壳形件30、第二壳形件20和地面磁线8,
28.所述机械卡扣1为钢件柱状空壳结构,两侧开有直角槽口101,槽口101用于插入轮毂中轴两侧六角头保险螺栓,机械卡扣1的前端与第一壳形件30固定连接,连接处可拆卸;
29.第一壳形件30包括可调开关11、微型电机2、角运动检测部件5和控制器10,可调开关11设置在壳形件30的上部,第一壳形件30的末端与机械卡扣1固定连接,壳形件30的前端与壳形件20活动连接,可调开关11与控制器10电连接;
30.第二壳形件20包括齿轮传动轴3、磁感应器4、高度测量器6、声光报警器7和语音播报器9,声光报警器7设置在第二壳形件20的前端,第二壳形件20的末端与第一壳形件30活动相连,齿轮传动轴3穿过第二壳形件20的末端与第一壳形件30,语音播报器9分别与高度测量器6、第一壳形件30中的控制器10电连接,声光报警器7分别与高度测量器6、第一壳形件30中的控制器10电连接,磁感应器4位于第二壳形件20的底端,磁感应器4与控制器10电连接,角运动检测部件5与微型电机2电连接,角运动检测部件5通过微型电机2控制齿轮传动轴3轴向转动第二壳形件20;
31.地面磁线8粘贴在当前飞机所属机型对应的停靠区域,地面磁线8位于磁感应器4的探测范围内。
32.可选地,所述角运动检测部件5为陀螺仪。
33.可选地,第一壳形件30和第二壳形件20通过滚珠轴承活动连接,齿轮传动轴3穿过滚珠轴承,控制第二壳形件20转动。
34.可选地,控制器10为plc检测处理模块。
35.可选地,可调开关11对应m个档位,所述m个档位包括n个机型档位和1个关闭档位,所述m为大于1的整数,n=m-1。
36.可选地,高度测量器6为红外测量器。
37.可选地,语音播报器9为蓝牙语音播报器。
38.本技术提供一种飞机移载限位装置,能避免生产现场指挥人员因视线受阻,导致飞机移载过度,与周围发生磕碰风险的问题;当飞机进入停靠区域时,声光报警装置能够迅速提醒指挥者及现场人员飞机移载到位,避免了移载机体超出停靠位置的问题;当飞机移载到位进行顶升时,蓝牙语音播报装置能够实时传输飞机顶升高度信息,避免了飞机顶升过高;该装置安装简单,使用便捷,可用于各类机型。
39.本技术提供一种飞机移载限位方法,用于飞机移载限位装置,如图1和图2所示,该装置包括:机械卡扣1、壳形件30、壳形件20和地面磁线8,所述机械卡扣1为钢件柱状空壳结构,两侧开有直角槽口101,机械卡扣1的前端与壳形件30固定连接,连接处可拆卸;壳形件30包括可调开关11、微型电机2、角运动检测部件5和控制器10,壳形件20包括齿轮传动轴3、磁感应器4、高度测量器6、语音播报器9和声光报警器7,
40.如图3和图4所示,该飞机移载限位方法包括:
41.机翼主千斤顶及尾千斤顶同时降下,飞机起落架三点着陆,在主起落架外侧前机轮轮毂中轴处安装飞机移载限位装置,所述安装过程包:将装置尾部的机械卡扣1的直角槽
口101的开口处对准轮毂中轴两侧六角头保险螺栓,使轮毂中轴两侧六角头保险螺栓插入至直角槽口101底部至飞机移载限位装置无法转动,依靠重力作用将飞机移载限位装置在轮毂内卡死,角运动检测部件5将第一夹角补偿信号传递至微型电机2,微型电机2驱动齿轮传动轴3转动壳形件20以控制磁感应器4的探测面平行于地面,将可调开关11调至当前飞机所属机型的档位,当飞机牵引设备将前起落架机轮抱起时,机头上扬,机身呈后倾趋势,角运动检测部件5将第二夹角补偿信号传递至微型电机2,微型电机2驱动齿轮传动轴3转动壳形件20以控制磁感应器4的探测面再次平行于地面,执行飞机的移载操作;
42.在当前飞机所属机型对应的停靠区域粘贴地面磁线8,根据可调开关11的机型档位,控制器10在检测到磁感应器4接收到地面磁线8发送的磁感应信号时,控制语音播报器9发出提示信号,所述提示信号用于通知指挥员及牵引设备操作员飞机已进入停靠区域,注意减速观察;控制器10在未检测到磁感应器4接收到地面磁线8发送的磁感应信号时,确定机轮超出地面磁线8的粘贴范围,并控制声光报警器7发出告警信号,所述告警信号用于通知现场所有人员飞机已到位,停止移载,完成飞机的就位操作;示例地,如图4所示,不同飞机所属机型对应的停靠区域不同,比如可以是a区域、b区域或c区域。本技术以当前飞机所属机型对应的停靠区域为a区域为例进行说明。
43.将飞机顶起至工作平台高度,主千斤顶和尾部千斤顶同时工作,高度测量器6测量飞机离地高度并通过语音播报器9将飞机离地高度实时提示给现场指挥者,高度测量器6在测量到飞机离地高度达到预设高度时,控制声光报警器7发出声光报警信号,飞机顶升结束。
44.可选地,高度测量器6和语音播报器9之间的连接方式为蓝牙连接。
45.本技术提供一种飞机移载限位方法,能避免生产现场指挥人员因视线受阻,导致飞机移载过度,与周围发生磕碰风险的问题;当飞机进入停靠区域时,声光报警装置能够迅速提醒指挥者及现场人员飞机移载到位,避免了移载机体超出停靠位置的问题;当飞机移载到位进行顶升时,蓝牙语音播报装置能够实时传输飞机顶升高度信息,避免了飞机顶升过高。
46.以上仅表达了本技术的实施方式,其描述较为具体和详细,但且不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。