基于5g
‑
dtu的无人机水文光谱成像水质检测装置
技术领域
1.本技术涉及水文监测技术的领域,特别是涉及一种基于5g
‑
dtu的无人机水文光谱成像水质检测装置。
背景技术:
2.目前,在水文监测领域,无人机已经得到了广泛的应用,无人机能够按照预先设定的控制程序进行自主飞行,并且能够携带各种检测设备,因此大大提高了水文监测工作的效率。
3.公告号为cn212539161u的中国专利公开了一种无人机水利水文流量测量装置,包括无人机本体,无人机本体的两侧固定连接有多个机翼,且无人机本体的两侧分别固定连接有l型杆,机翼表面设有防护机构,l型杆的底端设有漂浮机构,l型杆的一侧设有转动机构,转动机构包括连接板,连接板与l型杆的一侧固定连接,连接板的顶端连接有信号收发器,连接板的顶端连接有控制板。无人机飞行时,防护机构对机翼进行防护,信号收发器将各项数据传输到无人机的操作者处。当无人机迫降到水面上时,漂浮机构对无人机进行支撑,使无人机悬浮在水面上,然后操作者对无人机进行回收。
4.针对上述中的相关技术,发明人认为,当无人机在水面迫降后,水流将带动无人机移动,操作者需要乘船移动到无人机漂浮处才能对无人机进行回收,操作较为繁琐。
技术实现要素:
5.相关技术中,操作者需要乘船回收迫降至水面的无人机,操作较为繁琐,为了改善这一缺陷本技术提供一种基于5g
‑
dtu的无人机水文光谱成像水质检测装置。
6.本技术提供的一种基于5g
‑
dtu的无人机水文光谱成像水质检测装置,采用如下的技术方案得出:
7.一种基于5g
‑
dtu的无人机水文光谱成像水质检测装置,包括无人机、检测设备、信号传输设备、气囊以及导向机构,所述检测设备通过连接件与无人机连接,所述信号传输设备与无人机固定连接,所述气囊固定连接在无人机底端,所述无人机的侧壁上固定连接有安装板,所述导向机构包括转动设置在安装板上的桨叶以及用于驱动桨叶转动的电机,所述电机与安装板固定连接。
8.通过上述技术方案,当无人机迫降到水面时,气囊对无人机进行支撑,使无人机漂浮在水面上,同时安装板的底端伸入水下。然后,电机带动桨叶转动,桨叶推动无人机朝向岸边移动。在无人机移动的过程中,桨叶能够抵消水流对无人机的作用力,减少无人机被水流带走的可能。无人机靠岸后,操作者即可直接对无人机进行回收,从而提高了回收无人机时的便捷度。此外,在无人机飞行的过程中,桨叶还能够对无人机的倾斜度进行调节,从而提高了无人机飞行时的平稳度。
9.优选的:所述电机与桨叶之间设有传动组件,所述传动组件包括第一齿轮和第二齿轮,所述第一齿轮与电机的输出端同轴连接,所述第二齿轮与桨叶同轴连接,所述第一齿
轮与第二齿轮啮合。
10.通过上述技术方案,当需要驱动桨叶转动时,电机带动第一齿轮转动,第一齿轮带动第二齿轮转动,第二齿轮再带动桨叶转动,即可使电机实现对桨叶的驱动。
11.优选的:所述第一齿轮的直径大于第二齿轮的直径。
12.通过上述技术方案,当第一齿轮带动第二齿轮转动时,由于第一齿轮的直径大于第二齿轮的直径,因此第二齿轮转动的角速度大于第一齿轮转动的角速度,从而改善了桨叶带动无人机移动的效率。
13.优选的:所述连接件包括气缸、牵引绳以及滑轮,所述气缸固定连接在无人机远离机翼的一端,所述滑轮转动设置在无人机朝向气缸的一侧,所述气缸通过牵引绳与检测设备连接,所述牵引绳绕设过滑轮的外周缘。
14.通过上述技术方案,当无人机处于飞行状态时,气缸通过牵引绳带动检测设备向下移动,从而减少了气囊对检测设备的检测视角造成遮挡的可能;当无人机向水面降落时,气缸通过牵引绳带动检测设备向上移动,使得气囊接触水面时检测设备位于水面上方,从而减少了检测设备进水后发生损坏的可能。
15.优选的:所述无人机朝向气缸的一侧固定连接有多个滑轨,所述检测设备的侧壁上固定连接有多个滑块,所述滑块与滑轨一一对应并滑移配合。
16.通过上述技术方案,当气缸通过牵引绳调节检测设备的位置时,滑块沿滑轨移动,同时滑轨通过滑块对检测设备进行限位,从而减少了检测设备发生晃动的可能,提高了检测设备的稳定性。
17.优选的:所述滑轮沿周缘固定连接有两个挡环,所述挡环用于对牵引绳进行限位。
18.通过上述技术方案,当牵引绳沿滑轮的周缘滑动时,挡环沿滑轮的轴向对牵引绳进行限位,从而减少了牵引绳从滑轮边缘滑脱的可能。
19.优选的:所述无人机上固定连接有太阳能电池板。
20.通过上述技术方案,当无人机运行时,太阳能电池板吸收太阳能,并向无人机提提供电能,从而延长了无人机的工作时间。当无人机因电量耗尽而迫降至水面时,太阳能电池板能够向电机供电,使电机带动桨叶转动,直到无人机靠岸,从而有助于操作者回收无人机。
21.优选的:所述安装板背离无人机的一侧固定连接有弹性块。
22.通过上述技术方案,当无人机靠岸时,弹性块对无人机进行缓冲,从而减少了无人机因撞击岸边的岩石等坚硬物体而受损的可能,起到了保护无人机的效果。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.当无人机迫降至水面后,电机带动桨叶转动,桨叶推动无人机在水面移动,直到无人机靠岸,然后操作者在岸边对无人机进行回收,提高了操作者回收无人机时的便捷度;
25.2.当无人机飞行时,气缸通过牵引绳带动检测设备向下移动,直到检测设备移动到气囊下方,以减少气囊对检测设备的视野造成遮挡的可能;无人机迫降时,气缸带动检测设备向上移动,使得无人机迫降至水面时检测设备不与水面接触,从而减少了检测设备进水的可能。
附图说明
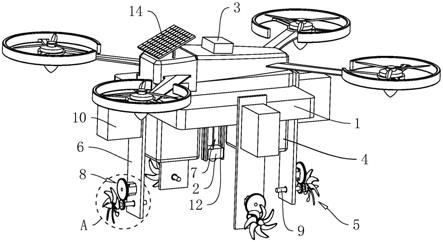
26.图1是本技术实施例的基于5g
‑
dtu的无人机水文光谱成像水质检测装置的整体结构示意图。
27.图2是图1中a部的放大图。
28.图3是本技术用于展示连接件的结构示意图。
29.附图标记说明:
30.1、无人机;2、检测设备;3、信号传输设备;4、气囊;5、导向机构;51、桨叶;52、电机;6、安装板;7、连接件;71、气缸;72、牵引绳;73、滑轮;8、传动组件;81、第一齿轮;82、第二齿轮;9、转轴;10、弹性块;11、挡环;12、滑轨;13、滑块;14、太阳能电池板。
具体实施方式
31.以下结合附图1
‑
3对本技术作进一步详细说明。
32.本技术实施例公开了一种基于5g
‑
dtu的无人机水文光谱成像水质检测装置。参照图1,一种基于5g
‑
dtu的无人机水文光谱成像水质检测装置包括无人机1、检测设备2、信号传输设备3、气囊4以及导向机构5。信号传输设备3固定连接在无人机1顶端,信号传输设备3可以是基于5g
‑
dtu的无线传输设备,无人机1顶端还固定连接有太阳能电池板14;无人机1的四个侧壁上均固定连接有安装板6,导向机构5设于安装板6上;气囊4共设有两个,两个气囊4均固定连接在无人机1底端,且两个气囊4间隔设置;检测设备2通过连接件7连接在无人机1底端模,检测设备2可以是光谱成像水质监测雷达。
33.参照图1,当无人机1飞行时,检测设备2对水体光谱信息进行采集,再通过信号传输设备3将水体光谱信息传递给操作者,太阳能电池板14吸收太阳能并向无人机1供电,以延长无人机1的飞行时间。当无人机1因临时故障而迫降至水面时,气囊4对无人机1进行支撑,使无人机1漂浮在水面上,然后太阳能电池板14向导向机构5供电,导向机构5带动无人机1移动,直到将无人机1引导至岸边,操作者在岸边对无人机1进行回收。由于无人机1能够自行靠岸,因此提高了操作者回收无人机1时的便捷度。
34.参照图1和图2,导向机构5包括桨叶51和电机52,电机52和桨叶51均设于安装板6底端,且电机52的位置高于桨叶51的位置。桨叶51和电机52之间设有传动组件8,传动组件8包括第一齿轮81和第二齿轮82,第一齿轮81与电机52的输出端同轴设置并固定连接;安装板6上穿设并转动连接有转轴9,转轴9、桨叶51、第二齿轮82三者同轴设置并固定连接,第一齿轮81与第二齿轮82啮合;第一齿轮81的直径大于第二齿轮82的直径,以进一步提高桨叶51的转速;安装板6上在远离桨叶51的一端固定连接有弹性块10,弹性块10的材质可以是泡沫塑料。
35.参照图1和图2,当无人机1迫降在水面上后,电机52带动第一齿轮81转动,第二齿轮82带动第一齿轮81、转轴9以及桨叶51三者共同转动,桨叶51推动无人机1在水面上移动,即可使无人机1靠岸。在靠岸时,弹性块10首先与岸边的岩石等硬物抵触,并对无人机1进行缓冲,从而减少了无人机1在靠岸时受损的可能。另外,当无人机1在空中需要调整姿态时,只需使电机52带动桨叶51转动,即可向无人机1施加侧向的作用力,从而对无人机1的飞行姿态进行调整。
36.参照图1和图3,连接件7包括气缸71、牵引绳72以及滑轮73,气缸71固定连接在无
人机1底端,滑轮73转动连接在无人机1底端,滑轮73沿周缘固定连接有两个挡环11,两个挡环11沿滑轮73的轴向间隔设置,牵引绳72的一端与气缸71的输出端固定连接,另一端沿两个挡环11之间的间隙绕设过滑轮73,并与检测设备2固定连接。两个挡环11在背离滑轮73的一侧均设置有一个滑轨12,检测设备2的侧壁上固定连接有两个滑块13,滑块13与滑轨12一一对应并滑移配合。
37.参照图1和图3,当无人机1飞行时,气缸71的输出端通过牵引绳72带动检测设备2沿滑轨12向下移动,直到检测设备2的位置低于气囊4的位置,以减少气囊4对检测设备2的视野造成阻挡的可能;当无人机1迫降时,气缸71的输出端缩回,检测设备2朝向无人机1移动,直到检测设备2底端的位置高于气囊4底端的位置。无人机1迫降至水面后,气囊4对无人机1进行支撑,同时检测设备2处于水面上方,从而减少了检测设备2进水后受损的可能。此外,在牵引绳72沿滑轮73的周缘滑动的过程中,两个挡环11共同对牵引绳72进行限位,从而减少了牵引绳72从滑轮73边缘滑脱的可能。
38.本技术实施例一种基于5g
‑
dtu的无人机水文光谱成像水质检测装置的实施原理为:当无人机1飞行时,检测设备2采集水体的光谱数据,信号传输设备3将检测设备2采集到的数据传递给操作者,同时太阳能电池板14向无人机1供电。当无人机1因临时故障而迫降至水面时,气囊4对无人机1进行支撑,太阳能电池板14向电机52供电,电机52带动桨叶51转动,并带动无人机1靠岸。回收无人机1时,操作者只需在岸上等待无人机1即可,无需进入水体中进行回收,从而提高了回收无人机1时的便捷度。
39.本具体实施例仅仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。