1.本发明涉及无人机技术领域,具体为一种基于树莓派操控系统的四旋翼无人机。
背景技术:
2.四旋翼无人机是一种具有结构紧凑、体积小、飞行平稳、灵活性高等优点,能够实现多种复杂任务的多旋翼无人机,在军用和民用领域都有着非常广泛的应用。树莓派作为一款物美价廉的微型电脑,被广发应用于物联网、开源电子和机器人等领域,在无人机上的应用极为广泛。
3.目前的四旋翼无人机在进行起落时,尤其是在野外作业并进行降落时,无人机无法有效的根据降落场地的实际情况,灵活调节起落架的分布结构,从而造成了无人机在降落后易出现倾斜甚至侧翻现象,导致无人机损坏,对于野外工作环境的适应能力,因此需要一种基于树莓派操控系统的四旋翼无人机对上述问题做出改善。
技术实现要素:
4.本发明的目的在于提供一种基于树莓派操控系统的四旋翼无人机,通过设置的调节机构与激光测距仪的配合使用,使得四个落地架组件能够同步一起接触地面,使得无人机能够精准平稳降落,避免出现无人机落地时倾斜侧翻,造成无人机损坏,提高对无人机的保护。
5.为实现上述目的,本发明提供如下技术方案:
6.一种基于树莓派操控系统的四旋翼无人机,包括无人机机体,所述无人机机体的外侧设置有四个平衡旋翼组,所述无人机机体内部设置有控制主板、蓄电池、gps定位仪、数据存储模块和无线收发器,所述蓄电池与控制主板电连接,所述无人机机体底部的两侧均设置有无人机机架,所述无人机机体的底部位于两个无人机机架之间设置有摄像机平衡机构,每个所述无人机机架两端的下方均设置有落地架组件;
7.所述落地架组件包括固定板和落地板,所述固定板置于落地板的上方且之间设置有缓冲组件,所述落地板底部的中间位置安装有激光测距仪;
8.所述落地架组件与无人机机架之间设置有用于调节落地架组件高度的调节机构。
9.优选的,所述控制主板与gps定位仪、数据存储模块、无线收发器、平衡旋翼组以及激光测距仪电连接。
10.优选的,所述无线收发器通过3g/4g/5g/gprs无线网络无线连接有控制终端。
11.优选的,所述调节机构包括驱动电机、丝杆和螺纹套筒,所述驱动电机安装在无人机机架上,所述驱动电机的输出端贯穿无人机机架并连接有丝杆,所述丝杆的外侧套设有螺纹套筒,所述螺纹套筒与丝杆螺纹连接,所述螺纹套筒的底端固定在固定板的顶部中间位置,所述驱动电机与控制主板电连接。
12.优选的,所述螺纹套筒的顶端外侧安装有连接板,所述连接板的两侧均安装有贯通的限位滑套,所述限位滑套内滑动连接有限位滑杆,所述限位滑杆的顶端固定在无人机
机架上,所述限位滑杆的底端穿过限位滑套并连接有第一限位块。
13.优选的,所述限位滑杆的长度小于丝杆的长度。
14.优选的,所述缓冲组件包括竖直安装在落地板顶部两侧的固定杆,所述固定板上开设有供固定杆穿过的通孔,所述固定杆的顶端穿过通孔并连接有第二限位块,所述落地板与固定板之间且位于固定杆的外侧套设有缓冲弹簧。
15.优选的,所述摄像机平衡机构包括x轴平衡组件和y轴平衡组件;
16.所述x轴平衡组件包括第一矩形框体、第一导向滑杆、第一移动座和第一复位弹簧,所述第一矩形框体的内部中间位置沿着长度设置有第一导向滑杆,所述第一导向滑杆的两端与第一矩形框体的内壁固定连接,所述第一导向滑杆上活动套设有第一移动座,所述第一移动座的两侧与第一矩形框体的内壁之间且位于第一导向滑杆的外侧套设有第一复位弹簧;
17.所述y轴平衡组件包括第二矩形框体、第二导向滑杆、第二移动座和第二复位弹簧,所述第二矩形框体的内部中间位置沿着长度方向设置有第二导向滑杆,所述第二导向滑杆的两端与第二矩形框体的内壁固定连接,所述第二导向滑杆上活动套设有第二移动座,所述第二移动座的两侧与第二矩形框体的内壁之间且位于第二导向滑杆的外侧套设有第二复位弹簧,所述第二移动座的底部设置有摄像机安装架;
18.所述第一导向滑杆与第二导向滑杆的水平投影为十字形。
19.优选的,所述第一矩形框体的内部沿着长度方向的两侧均安装有第一滑轨,所述第一滑轨上滑动连接有第一滑块,所述第一滑块安装在第一移动座上;
20.所述第二矩形框体的内部沿着长度方向的两侧均安装有第二滑轨,所述第二滑轨上滑动连接有第二滑块,所述第二滑块安装在第二移动座上。
21.优选的,所述第一矩形框体的顶端外侧设置有第一外沿安装板,所述第一外沿安装板通过螺栓安装在无人机机体的底部,所述第二矩形框体的外壁两侧均设置有第二外沿安装板,所述第二外沿安装板通过螺栓安装在第一移动座的底部。
22.与现有技术相比,本发明提供了一种基于树莓派操控系统的四旋翼无人机,具备以下有益效果:
23.本发明中,通过设置的调节机构与激光测距仪的配合使用,通过四个落地架组件上的激光测距仪用于测量每个落地架组件与地面的距离,并将信息传输给控制主板,控制主板控制相应的驱动电机驱动丝杆转动,从而调节丝杆和螺纹套筒的整体长度,调节落地架组件的高度位置,使得四个落地架组件能够同步一起接触地面,使得无人机能够精准平稳降落,避免出现无人机落地时倾斜侧翻,造成无人机损坏,通过设置的摄像机平衡机构,在无人机飞行的过程中,减缓摄像机在x轴和y轴方向的晃动,使得摄像头拍摄稳定性高,成像清晰。
附图说明
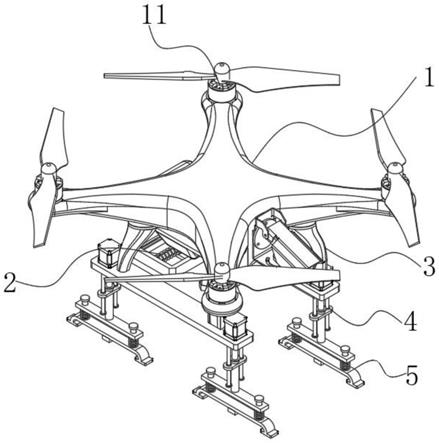
24.图1为本发明一种基于树莓派操控系统的四旋翼无人机的整体结构示意图;
25.图2为本发明一种基于树莓派操控系统的四旋翼无人机的调节机构结构示意图;
26.图3为本发明一种基于树莓派操控系统的四旋翼无人机的落地架组件结构示意图;
27.图4为本发明一种基于树莓派操控系统的四旋翼无人机的摄像机平衡机构结构示意图;
28.图5为本发明一种基于树莓派操控系统的四旋翼无人机的摄像机平衡机构拆分图;
29.图6为本发明一种基于树莓派操控系统的四旋翼无人机的系统框图。
30.图中:1、无人机机体;11、平衡旋翼组;12、控制主板;13、蓄电池;14、gps定位仪;15、数据存储模块;16、无线收发器;2、摄像机平衡机构;21、x轴平衡组件;211、第一矩形框体;212、第一外沿安装板;213、第一导向滑杆;214、第一移动座;215、第一复位弹簧;216、第一滑轨;217、第一滑块;22、y轴平衡组件;221、第二矩形框体;222、第二外沿安装板;223、第二导向滑杆;224、第二移动座;225、第二复位弹簧;226、第二滑轨;227、第二滑块;228、摄像机安装架;3、无人机机架;4、调节机构;41、驱动电机;42、丝杆;43、螺纹套筒;44、连接板;45、限位滑套;46、限位滑杆;47、第一限位块;5、落地架组件;51、固定板;52、落地板;53、固定杆;54、缓冲弹簧;55、第二限位块;6、激光测距仪。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的若干实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
33.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
35.请参阅图1
‑
6,本发明提供一种技术方案:
36.一种基于树莓派操控系统的四旋翼无人机,包括无人机机体1,无人机机体1的外侧设置有四个平衡旋翼组11,无人机机体1内部设置有控制主板12、蓄电池13、gps定位仪14、数据存储模块15和无线收发器16,蓄电池13与控制主板12电连接,无人机机体1底部的两侧均设置有无人机机架3,无人机机体1的底部位于两个无人机机架3之间设置有摄像机平衡机构2,每个无人机机架3两端的下方均设置有落地架组件5;
37.落地架组件5包括固定板51和落地板52,固定板51置于落地板52的上方且之间设置有缓冲组件,落地板52底部的中间位置安装有激光测距仪6;
38.落地架组件5与无人机机架3之间设置有用于调节落地架组件5高度的调节机构4。
39.本实施例中,如图6所示,控制主板12与gps定位仪14、数据存储模块15、无线收发器16、平衡旋翼组11以及激光测距仪6电连接。
40.无线收发器16通过3g/4g/5g/gprs无线网络无线连接有控制终端。
41.如图6所示,通过无线收发器16和控制终端实现无人机的远程控制,通过gps定位仪14对无人机进行定位,通过数据存储模块15用于存储摄像机的拍摄数据,并传输给控制终端。
42.本实施例中,如图1和图2所示,调节机构4包括驱动电机41、丝杆42和螺纹套筒43,驱动电机41安装在无人机机架3上,驱动电机41的输出端贯穿无人机机架3并连接有丝杆42,丝杆42的外侧套设有螺纹套筒43,螺纹套筒43与丝杆42螺纹连接,螺纹套筒43的底端固定在固定板51的顶部中间位置,驱动电机41与控制主板12电连接。
43.螺纹套筒43的顶端外侧安装有连接板44,连接板44的两侧均安装有贯通的限位滑套45,限位滑套45内滑动连接有限位滑杆46,限位滑杆46的顶端固定在无人机机架3上,限位滑杆46的底端穿过限位滑套45并连接有第一限位块47。
44.限位滑杆46的长度小于丝杆42的长度。
45.如图1和图2所示,通过调节机构4与激光测距仪6的配合使用,通过四个落地架组件5上的激光测距仪6用于测量每个落地架组件5与地面的距离,并将信息传输给控制主板12,控制主板12控制相应的驱动电机41驱动丝杆42转动,从而调节丝杆42和螺纹套筒43的整体长度,通过限位滑杆46的长度小于丝杆42的长度,不会导致丝杆42脱离,调节落地架组件5的高度位置,在调整时,通过激光测距仪6实时测量与地面的距离,使得四个激光测距仪6测得与地面的之间的距离一致,这样在无人机落地时,四个落地架组件5能够同步一起接触地面,使得无人机能够精准平稳降落,避免出现无人机落地时倾斜侧翻,造成无人机损坏。
46.本实施例中,如图3所示,缓冲组件包括竖直安装在落地板52顶部两侧的固定杆53,固定板51上开设有供固定杆53穿过的通孔,固定杆53的顶端穿过通孔并连接有第二限位块55,落地板52与固定板51之间且位于固定杆53的外侧套设有缓冲弹簧54。
47.如图3所示,在无人机落地时,落地板52先接触地面将落地板52向固定板51方向移动,从而压缩缓冲弹簧54,通过缓冲弹簧54的弹性作用缓冲吸收无人机落地时的冲击力,提高对无人机的保护作用。
48.本实施例中,如图4和图5所示,摄像机平衡机构2包括x轴平衡组件21和y轴平衡组件22;
49.x轴平衡组件21包括第一矩形框体211、第一导向滑杆213、第一移动座214和第一复位弹簧215,第一矩形框体211的内部中间位置沿着长度设置有第一导向滑杆213,第一导向滑杆213的两端与第一矩形框体211的内壁固定连接,第一导向滑杆213上活动套设有第一移动座214,第一移动座214的两侧与第一矩形框体211的内壁之间且位于第一导向滑杆213的外侧套设有第一复位弹簧215;
50.y轴平衡组件22包括第二矩形框体221、第二导向滑杆223、第二移动座224和第二复位弹簧225,第二矩形框体221的内部中间位置沿着长度方向设置有第二导向滑杆223,第二导向滑杆223的两端与第二矩形框体221的内壁固定连接,第二导向滑杆223上活动套设有第二移动座224,第二移动座224的两侧与第二矩形框体221的内壁之间且位于第二导向
滑杆223的外侧套设有第二复位弹簧225,第二移动座224的底部设置有摄像机安装架228;
51.第一导向滑杆213与第二导向滑杆223的水平投影为十字形。
52.第一矩形框体211的内部沿着长度方向的两侧均安装有第一滑轨216,第一滑轨216上滑动连接有第一滑块217,第一滑块217安装在第一移动座214上;
53.第二矩形框体221的内部沿着长度方向的两侧均安装有第二滑轨226,第二滑轨226上滑动连接有第二滑块227,第二滑块227安装在第二移动座224上。
54.第一矩形框体211的顶端外侧设置有第一外沿安装板212,第一外沿安装板212通过螺栓安装在无人机机体1的底部,第二矩形框体221的外壁两侧均设置有第二外沿安装板222,第二外沿安装板222通过螺栓安装在第一移动座214的底部。
55.如图4和图5所示,使用时,将摄像机安装在摄像机安装架228上,在无人机飞行的过程中,通过第一移动座214在第一导向滑杆213上滑动从而压缩第一复位弹簧215,通过第一滑轨216和第一滑块217提高第一移动座214移动的稳定性,通过第一复位弹簧215的弹性作用减缓摄像机在x轴方向的晃动,通过第二移动座224在第二导向滑杆223上滑动从而压缩第二复位弹簧225,通过第二滑轨226和第二滑块227提高第二移动座224移动的稳定性,通过第二复位弹簧225的弹性作用减缓摄像机在y轴方向的晃动,使得摄像头拍摄稳定性高,成像清晰。
56.本发明工作原理:使用时,通过无线收发器16和控制终端对无人机进行远程控制,在无人机飞行的过程中,通过第一移动座214在第一导向滑杆213上滑动从而压缩第一复位弹簧215,通过第一滑轨216和第一滑块217提高第一移动座214移动的稳定性,通过第一复位弹簧215的弹性作用减缓摄像机在x轴方向的晃动,通过第二移动座224在第二导向滑杆223上滑动从而压缩第二复位弹簧225,通过第二滑轨226和第二滑块227提高第二移动座224移动的稳定性,通过第二复位弹簧225的弹性作用减缓摄像机在y轴方向的晃动,使得摄像头拍摄稳定性高,成像清晰,在无人机降落时,通过调节机构4与激光测距仪6的配合使用,通过四个落地架组件5上的激光测距仪6用于测量每个落地架组件5与地面的距离,并将信息传输给控制主板12,控制主板12控制相应的驱动电机41驱动丝杆42转动,从而调节丝杆42和螺纹套筒43的整体长度,通过限位滑杆46的长度小于丝杆42的长度,不会导致丝杆42脱离,调节落地架组件5的高度位置,在调整时,通过激光测距仪6实时测量与地面的距离,使得四个激光测距仪6测得与地面的之间的距离一致,这样在无人机落地时,四个落地架组件5能够同步一起接触地面,使得无人机能够精准平稳降落,避免出现无人机落地时倾斜侧翻,同时,落地板52先接触地面将落地板52向固定板51方向移动,从而压缩缓冲弹簧54,通过缓冲弹簧54的弹性作用缓冲吸收无人机落地时的冲击力,提高对无人机的保护作用。
57.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。