1.本实用新型属于无人机技术领域,具体为一种检测精度高的地下电力输电线路管道巡检无人机。
背景技术:
2.随着无人机的快速发展,无人机已经可以用于到航拍摄影、环境检测、电力巡检、新闻报道与快递送货等领域,但是由于地下电力输电线路管道的长期使用,使得管道的表面避免不了的会堆积一些灰尘,从而影响了无人机检测的准确数据。
技术实现要素:
3.(一)解决的技术问题
4.为了克服现有技术的上述缺陷,本实用新型提供了一种检测精度高的地下电力输电线路管道巡检无人机,解决了地下电力输电线路管道的长期使用,使得管道的表面避免不了的会堆积一些灰尘,从而影响了无人机检测的准确数据的问题。
5.(二)技术方案
6.为实现上述目的,本实用新型提供如下技术方案:一种检测精度高的地下电力输电线路管道巡检无人机,包括无人机,所述无人机的下表面固定连接有四个支撑柱,两个所述支撑柱内设置有同一个转筒,两个所述转筒的外表面均开设有弧形槽,两个所述弧形槽内设置有同一个滑块,两个所述转筒的外表面传动连接有同一个传动机构。
7.所述滑块的下表面与夹持机构的上表面固定连接,所述滑块的下表面与存储罐的上表面固定连接,所述存储罐的正面与气泵的背面相连通,所述气泵通过连通管与喷头相连通。
8.作为本实用新型的进一步方案:所述滑块的上表面与限位块的下表面固定连接,所述限位块设置在无人机的下表面。
9.作为本实用新型的进一步方案:所述限位块设置为“t”形。
10.作为本实用新型的进一步方案:所述无人机的上表面与太阳能电池板的下表面固定连接,右侧所述转筒的后端与电机的输出轴固定连接。
11.作为本实用新型的进一步方案:所述电机的上表面与固定块的下表面固定连接,所述固定块的上表面与无人机的下表面固定连接。
12.作为本实用新型的进一步方案:所述夹持机构包括支撑箱,所述支撑箱的上表面与滑块的下表面固定连接,所述支撑箱的下表面卡接有电动伸缩杆,所述电动伸缩杆的底端与限位板的上表面固定连接。
13.作为本实用新型的进一步方案:所述限位板的正面和背面均铰接有四个控制板,四个所述控制板与调节板铰接,两个所述调节板的上表面与支撑箱的下表面滑动连接,两个调节板的相对面设置有同一个摄像头。
14.(三)有益效果
15.与现有技术相比,本实用新型的有益效果在于:
16.1、该检测精度高的地下电力输电线路管道巡检无人机,通过设置转筒、弧形槽、滑块、传动机构、电机、存储罐、气泵、连通管和喷头,启动电机,电机带动右侧转筒进行转动,使得右侧转筒通过传动机构带动左侧转筒进行转动,从而对滑块的位置进行移动,使得滑块带动存储罐和摄像头进行移动,使得喷头移动到地下电力输电线路管道疑似裂纹处,然后气泵对存储罐充气加压,使得气体通过连通管灌输到喷头内,从而对地下电力输电线路管道疑似裂纹处进行吹灰清理,使得摄像头拍摄的画面更加清晰,从而提高了检测的精度。
17.2、该检测精度高的地下电力输电线路管道巡检无人机,通过设置电动伸缩杆、调节板、控制板和限位板,启动电动伸缩杆,使得电动伸缩杆带动限位板向上移动,从而对控制板的位置进行调整,使得控制板带动两个调节板相向移动,从而对摄像头的外表面进行挤压夹持,保证了摄像头在工作过程中的稳定性,避免摄像头出现掉落的情况。
18.3、该检测精度高的地下电力输电线路管道巡检无人机,通过设置太阳能电池板,能够对无人机内的蓄电池进行额外供电,使得无人机的续航得到提升,并且更加环保。
附图说明
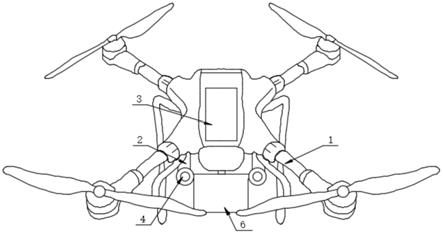
19.图1为本实用新型立体的结构示意图;
20.图2为本实用新型滑块正视的剖面结构示意图;
21.图3为本实用新型转筒立体的结构示意图;
22.图4为本实用新型滑块立体的剖面结构示意图;
23.图5为本实用新型夹持机构立体的结构示意图;
24.图中:1无人机、2支撑柱、3太阳能电池板、4转筒、5弧形槽、6滑块、7限位块、8传动机构、9电机、10固定块、11夹持机构、1101电动伸缩杆、1102调节板、1103控制板、1104限位板、1105支撑箱、12摄像头、13存储罐、14气泵、15连通管、16喷头。
具体实施方式
25.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
26.如图1
‑
5所示,本实用新型提供一种技术方案:一种检测精度高的地下电力输电线路管道巡检无人机,包括无人机1,无人机1的下表面固定连接有四个支撑柱2,通过设置支撑柱2,能够对转筒4的转动提供一个支撑点,从而保证了转筒4在转动过程中的稳定性,避免出现掉落的情况,两个支撑柱2内设置有同一个转筒4,两个转筒4的外表面均开设有弧形槽5,通过设置弧形槽5,使得滑块6沿着弧形槽5的运动轨迹进行移动,两个弧形槽5内设置有同一个滑块6,通过设置滑块6,能够带动夹持机构11和存储罐13进行移动,以便进行后续工作,两个转筒4的外表面传动连接有同一个传动机构8。
27.滑块6的下表面与夹持机构11的上表面固定连接,通过设置夹持机构11,能够对摄像头12的外表面进行挤压夹持,保证了摄像头12在工作过程中的稳定性,避免摄像头12出现掉落的情况,滑块6的下表面与存储罐13的上表面固定连接,存储罐13的正面与气泵14的背面相连通,气泵14通过连通管15与喷头16相连通,通过设置存储罐13、气泵14、连通管15和喷头16,使得气体通过连通管15灌输到喷头16内,从而对地下电力输电线路管道疑似裂纹处进行吹灰清理,使得摄像头12拍摄的画面更加清晰,从而提高了检测的精度。
28.具体的,如图1所示,无人机1的上表面与太阳能电池板3的下表面固定连接,右侧转筒4的后端与电机9的输出轴固定连接,通过设置太阳能电池板3,能够对无人机1内的蓄电池进行额外供电,使得无人机1的续航得到提升,并且更加环保。
29.具体的,如图3所示,滑块6的上表面与限位块7的下表面固定连接,限位块7设置在无人机1的下表面,无人机1下表面设置有燕尾滑槽,通过设置限位块7,使得限位块7在无人机1下表面的燕尾滑槽内滑动,从而保证了滑块6在移动过程中的稳定性,避免出现转动的情况,限位块7设置为“t”形,电机9的上表面与固定块10的下表面固定连接,固定块10的上表面与无人机1的下表面固定连接。
30.具体的,如图2、图4和图5所示,夹持机构11包括支撑箱1105,支撑箱1105的上表面与滑块6的下表面固定连接,支撑箱1105的下表面卡接有电动伸缩杆1101,通过设置支撑箱1105,能够对电动伸缩杆1101进行支撑,避免电动伸缩杆1101出现掉落的情况,电动伸缩杆1101的底端与限位板1104的上表面固定连接,限位板1104的正面和背面均铰接有四个控制板1103,四个控制板1103与调节板1102铰接,通过设置调节板1102和控制板1103,使得控制板1103对调节板1102的位置进行调整,能够对摄像头12进行夹持,两个调节板1102的上表面与支撑箱1105的下表面滑动连接,两个调节板1102的相对面设置有同一个摄像头12。
31.本实用新型的工作原理为:
32.s1、将摄像头12放置在两个调节板1102的相对面,启动电动伸缩杆1101,使得电动伸缩杆1101带动限位板1104向上移动,从而对控制板1103的位置进行调整,使得控制板1103带动两个调节板1102相向移动,从而对摄像头12的外表面进行挤压夹持;
33.s2、然后操控者操控无人机1的飞行路线,摄像头12对地下电力输电线路管道进行检测,当摄像头12检测到地下电力输电线路管道的表面出现疑似裂纹时,将无人机1停留在疑似裂纹的上端,然后启动电机9,电机9带动右侧转筒4进行转动,使得右侧转筒4通过传动机构8带动左侧转筒4进行转动,从而对滑块6的位置进行移动,使得滑块6带动夹持机构11、摄像头12、存储罐13、气泵14、连通管15和喷头16进行移动;
34.s3、从而将喷头16和摄像头12移动到地下电力输电线路管道疑似裂纹处,再停止移动,然后气泵14对存储罐13充气加压,使得气体通过连通管15灌输到喷头16内,从而对地下电力输电线路管道疑似裂纹处进行吹灰清理,清理后通过摄像头12进行拍摄检测。
35.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
36.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。